
Sähköpolkupyörät (e-pyörät), mukaan lukien sähkökäyttöiset lastipyörät, perustuvat monimutkaiseen sähköjärjestelmään, joka yhdistää akun, moottorin, ohjaimen, anturit ja käyttöliittymän. Järjestelmän viestintäprotokollat toimivat "kielenä", jonka avulla kaikki nämä komponentit koordinoivat saumattomasti toisiaan. Tässä populaaritieteellisessä katsauksessa selvitämme, mitä nämä viestintäprotokollat ovat ja miten ne toimivat sähköpyörän sähköjärjestelmissä. Käsitellään käytettyjä protokollien tyyppejä, niiden eroja, missä kutakin sovelletaan, niiden hyviä ja huonoja puolia, kustannusnäkökohtia, EU:n ja Yhdysvaltojen turvallisuusstandardien noudattamista ja rajoituksia. Tavoitteena on tarjota selkeä, arvovaltainen opas asiakkaalle ja yleisölle, jossa tekninen syvällisyys ja käytännön ymmärrys ovat tasapainossa.
Sähköpyörän tärkeimmät komponentit - "hermostojärjestelmä"
Sähköpyörien voidaan ajatella olevan keskushermosto, joka koostuu johdoista ja datayhteyksistä, jotka yhdistävät kaikki kriittiset komponentit toisiinsa. Aivan kuten hermot kuljettavat signaaleja kehossa, johdinsarja kuljettaa sekä virta- että datasignaaleja koko pyörän läpi. Tyypillisen sähköpyörän sähköjärjestelmän keskeisiä komponentteja ovat muun muassa seuraavat:

- Akku: Tasavirtalähde (yleensä 36-48 V), joka tuottaa energiaa järjestelmään. Se liitetään ohjaimeen paksujen virtajohtojen (joissa on sulakkeet tai katkaisijat turvallisuuden vuoksi) kautta päävirran syöttämiseksi. Joissakin kehittyneissä akuissa on myös datayhteys (tietoliikennelinjojen kautta), jonka avulla voidaan jakaa tila- tai ohjaussignaaleja ohjaimen kanssa.
- Moottori ja ohjain: Moottori (napamoottori pyörässä tai keskiveto kampiakselilla) saa virtaa moottorinohjaimesta, joka on "aivot", joka säätelee moottorin tehoa kuljettajan syötteiden ja anturipalautteen perusteella. Ohjain on elektroninen yksikkö, jossa on mikroprosessori, joka vastaanottaa signaaleja (kaasu, poljinanturi, jarrut jne.) ja ohjaa moottorin tehoa. Moottoreissa on tyypillisesti vaihejohtoja (raskaat kaapelit, jotka kuljettavat virtaa) ja anturijohtoja (ohuet kaapelit Hall-antureista, jotka antavat palautetta roottorin asennosta), jotka menevät ohjaimelle.
- Ihmisen käyttöliittymä (kaasu, poljinanturi, näyttö): Kuljettaja kommunikoi sähköpyörän kanssa laitteiden, kuten kaasun (usein ohjaustangon kahva, jossa on Hall-anturi, joka antaa muuttuvan jännitesignaalin nopeuden pyytämiseksi) ja poljinavustinanturin (PAS) kautta, joka havaitsee poljinliikkeen magneettien ja antureiden avulla. Ohjaustangossa oleva näyttö näyttää nopeuden, akun varaustason, avustustason jne., ja siinä on usein painikkeita, joilla kuljettaja voi säätää asetuksia. Näyttö ja ohjain vaihtavat tietoja monijohtimisen kaapelin kautta, johon kuuluu virta- ja tiedonsiirtolinjat .
- Turvakatkaisimet (jarruvivut): Sähköpyörän jarruvivuilla on yleensä katkaisukytkimet, jotka lähettävät ohjaimelle signaalin, joka katkaisee moottorin tehon välittömästi jarrutettaessa. Yleensä tähän käytetään yksinkertaista kaksijohdinpiiriä, joka toimii on/off-signaalina ohjaimelle.
- Valaistus ja lisävarusteet: Monissa sähköpyörissä on myös etu-/takavalot, torvi, USB-laturit jne. Näitä voidaan ohjata pääohjaimella tai ne voivat toimia erillisissä piireissä, mutta huippuluokan järjestelmissä niitä voidaan ohjata myös viestintäväylän kautta.
Yksityiskohtaisen oppaan sähkö- ja rahtipyörien lisävarusteista löydät osoitteesta lue tämä artikkeli kattavamman vastauksen saamiseksi , tai ehkä tarkistaa meidän Cargo Bike 101 sivu.
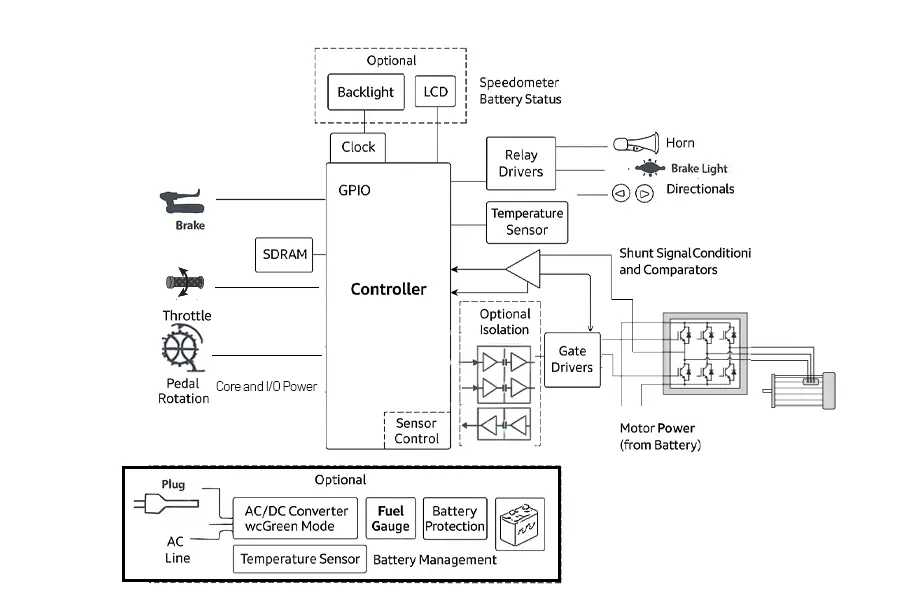
Kuva 2: Lohkokaavio tyypillisestä sähköpolkupyörän ohjaus- ja akunhallintajärjestelmästä. Keskusohjain kytkeytyy tärkeimpiin tuloihin - kaasu, poljinanturit, jarruvivut - ja hallitsee lähtöjä, kuten moottorin käyttösignaaleja, porttiohjaimien, releohjaimien ja GPIO-liitäntöjen kautta. Valinnaiset moduulit, kuten LCD-näytöt, akkulaturit, polttoainemittarit ja taustavalot, laajentavat järjestelmän toimintoja. Komponenttien välinen tiedonsiirto tukee moottorin tehon, valaistuksen, turvakatkaisujen ja akun tilanvalvonnan reaaliaikaista koordinointia.
Mitkä ovat sähköpyörän viestintäprotokollat?
Sähköpyörien yhteydessä viestintäprotokollilla tarkoitetaan menetelmää ja muotoa, jolla elektroniset komponentit vaihtavat tietoja. Varhaisissa tai perustason sähköpyörissä ei useinkaan ollut monimutkaista digitaalista verkkoa - monet signaalit olivat analogisia tai yksinkertaisia on/off-piirejä. Esimerkiksi kaasuläppä lähettää analogisen jännitteen ilmaisemaan, kuinka paljon tehoa kuljettaja haluaa, ja jarrukytkin yksinkertaisesti avaa tai sulkee virtapiirin katkaistakseen tehon. Kun sähköpyöristä on kuitenkin tullut kehittyneempiä - älykkäät näytöt, kehittyneet anturit ja jopa GPS- tai älypuhelinintegraatio - syntyi tarve vankemmalle digitaaliselle viestinnälle.
Nykyään kaksi ensisijaista digitaalista viestintäprotokollaa hallitsee sähköpyöräjärjestelmiä:
- UART (Universal Asynchronous Receiver-Transmitter): Sarjaliikennemenetelmä, joka luo suoran yksi yhteen -tiedonsiirtoyhteyden kahden laitteen (tyypillisesti ohjaimen ja näytön) välille.
- CAN-väylä (Controller Area Network): Verkkoprotokolla, jonka avulla useat laitteet (ohjain, näyttö, akun BMS, anturit jne.) voivat kommunikoida samojen yhteisten väyläjohtojen kautta.
UART- ja CAN-väylän lisäksi sähköpyöräjärjestelmissä käytetään toisinaan kahta muuta viestintäprotokollaa:
- SIF (Serial Interface Format): Tämä on oma tai yksinkertaistettu protokolla, joka on yleisesti käytössä tietyissä merkkijärjestelmissä (esim. Shimano STEPS tai vanhemmat näyttöyksiköt). Sitä käytetään yleensä perustietojen vaihtoon ohjaimen ja näytön tai kauko-ohjauspainikkeiden välillä. Koska SIF:ltä puuttuu avoin standardointi ja joustavuus, se rajoittuu useimmiten tiettyihin tuotemerkkeihin tai vanhoihin malleihin.
- RS-485 (suositeltu standardi 485): RS-485 on teollisen luokan sarjaliikenneprotokolla, joka tunnetaan pitkän matkan luotettavuudestaan ja häiriönsietokyvystään. Vaikka se ei olekaan yhtä yleinen kuin UART tai CAN kuluttajien sähköpyörissä, se esiintyy kuitenkin jotkin huippuluokan tai kaupallisen laivaston järjestelmäterityisesti silloin, kun tarvitaan kestävyyttä ja pitkää johdotusta, kuten jaetuissa polkupyörissä, vuokrauslaivastoissa tai raskaissa sähköpyörissä.
Nämä protokollat ovat käytännössä sähköpyörän elektroniikan "kieliä". Jos kaikki komponentit puhuvat samaa kieltä, tiedot kulkevat oikein; jos näin ei ole, laitteet eivät ymmärrä toisiaan. Siksi protokollan yhteensovittaminen on tärkeää, kun esimerkiksi näyttö ja ohjain yhdistetään. Vaikka pistoke sopisi, protokollan yhteensopimattomuus tarkoittaa, että osat eivät toimi yhdessä.
Markkinoiden käytön yleiskatsaus (2024-2025 arvioidut suuntaukset)
Vaikka sähköpyörämarkkinoilla ei ole yleisesti julkaistua jaottelua protokollan käytöstä, alan näkemysten ja tärkeimpien järjestelmätoimittajien (esim. Bosch, Bafang, Shimano, Mahle jne.) perusteella voidaan todeta seuraavaa kohtuullinen arvioitu jakauma vuodesta 2025 alkaen:
| Pöytäkirja | Käyttöosuus (arvioitu) | Yleiset sovellukset | Huomautukset |
|---|---|---|---|
| UART | ~50-60% | Alkutason ja keskitason sähköpyörät | Käytetään laajalti yksinkertaisuuden ja edullisuuden vuoksi. |
| CAN-väylä | ~30-35% | Korkealuokkaiset, älykkäät tai modulaariset sähköpyörät | Käyttöönoton lisääminen älykkäällä integroinnilla |
| RS-485 | ~5-10% | Laivaston järjestelmät, kaupalliset pitkän langan järjestelmät | Rajoittuu tiettyihin käyttötapauksiin |
| SIF / Omistusoikeus | <5% | Tuotemerkkikohtaiset tai vanhat järjestelmät | Esiintyy useimmiten vanhemmissa tai lukituissa ekosysteemeissä. |
Huom: Nämä luvut on yleistetty maailmanlaajuisille markkinoille (EU, CN, NA), ja ne perustuvat OEM-trendeihin, julkisiin asiakirjoihin, purkutietoihin ja komponenttitoimittajien tietoihin.
Määritellään sähköpyörän viestintäprotokollat helpommin :
Yksinkertaisesti sanottuna sähköpyörien viestintäprotokollat ovat seuraavanlaisia. kielet tai säännöt, joiden avulla elektroniikan eri osat voivat keskustella keskenään.. Jos komponentit eivät puhu samaa kieltä, ne eivät ymmärrä toisiaan - vaikka pistoke fyysisesti sopisi yhteen.
📞 Analogia: Puhelu kahden kesken vs. ryhmäkeskustelu
Kuvitellaanpa kaksi arkipäivän viestintätapaa, jotta voimme ymmärtää sähköpyöräprotokollia:
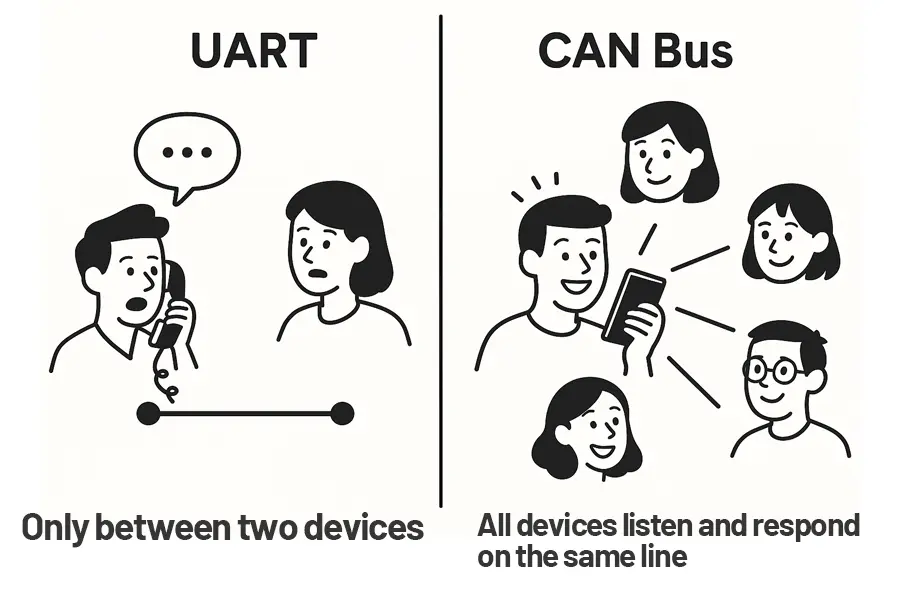
UART: Kuin puhelinsoitto kahden kesken
- UART (Universal Asynchronous Receiver-Transmitter) on kuin soittaisi ystävälle puhelimella.
- Vain kaksi laitetta voi puhua kerrallaan, kuten näyttö ja ohjain.
- Jos haluat puhua toiselle laitteelle, sinun täytyy toinen johto (tai toinen puhelinsoitto).
- Se on yksinkertainen, mutta ei skaalautuva, kun laitteita on paljon.
- Yleinen sähköpyörän perusjärjestelmät rajoitetuilla ominaisuuksilla.
AN Bus: Kuin ryhmäkeskustelu
- CAN-väylä (Controller Area Network) on kuin ohjainverkko. ryhmäkeskustelu WhatsAppissa tai WeChatissa.
- Kaikki laitteet (ohjain, akku, näyttö, anturi, valot) ovat samassa chat-huoneessa.
- Jokainen viesti merkitään lähettäjän tunnisteella, ja jokainen laite lukee vain sille tarkoitetut viestit.
- Se on paljon tehokkaampi ja ihanteellinen, kun on paljon komponentteja, joiden on toimittava yhdessä.
- Käytetään älykkäät, kehittyneet sähköpyöräjärjestelmät, usein GPS, Bluetooth ja sovellusintegraatio.
| Ominaisuus | UART (puhelu) | CAN-väylä (ryhmäkeskustelu) |
|---|---|---|
| Liitäntätyyppi | Yksi yhteen (point-to-point) | Yksi monelle (jaettu väylä) |
| Skaalautuvuus | Alhainen - tarvitsee ylimääräisiä johtoja useampia laitteita varten | Korkea - useat laitteet käyttävät samoja johtoja |
| Viestinnän kulku | Vain kahden laitteen välillä | Kaikki laitteet kuuntelevat ja vastaavat samalla linjalla |
| Monimutkaisuus | Yksinkertainen | Monimutkaisempi mutta tehokkaampi |
| Käyttötapaus | Perus sähköpyörät (vain näyttö ↔ ohjain) | Älykkäät sähköpyörät, joissa on BMS, sovellus, anturit jne. |
Viestintäprotokollien rooli
Sähköpyörien viestintäprotokollat palvelevat useita tärkeitä tarkoituksia:
- Tietojen jakaminen: Niiden avulla ohjain voi lähettää reaaliaikaisia tietoja näytölle (nopeus, akun varaustila, virhekoodit) ja vastaanottaa komentoja takaisin (esim. avustustason muuttaminen, valot päälle/pois). Ilman asianmukaista protokollaa et välttämättä saa luotettavaa nopeuslukemaa tai et voi säätää asetuksia.
- Komponenttien koordinointi: Kehittyneissä järjestelmissä useiden mikrokontrollereiden on koordinoitava toimintojaan. Esimerkiksi älykäs akku, jolla on oma akunhallintajärjestelmä (BMS), saattaa kommunikoida moottorinohjaimen kanssa ylivirran estämiseksi tai akun tarkan prosenttiosuuden näyttämiseksi. CAN-väylän tai vastaavan verkon avulla akku, moottorinohjain, näyttö ja jopa anturit voivat jakaa tietoja monisolmuverkossa.
- Turvallisuus ja luotettavuus: Järjestelmä pystyy havaitsemaan vian tai signaalin katkeamisen (esimerkiksi kaapeli on vaurioitunut) ja ryhtymään turvallisiin toimenpiteisiin (esimerkiksi katkaisemaan moottorin virran). CAN:n kaltaiset vankat protokollat sisältävät virhetarkistuksen ja viestien priorisoinnin, jotta tämä voidaan hoitaa. Yksinkertaisemmista analogisista signaaleista puuttuu tällainen virheenkäsittely - jos kaasuvaijeri irtoaa, ohjain saattaa tulkita kohinan väärin kaasusignaaliksi, ellei turvamääräyksiä ole otettu käyttöön.
- Laajennettavuus: Tietoliikenneverkko helpottaa laitteiden lisäämistä tai poistamista, kun kyseessä ovat ominaisuuksiltaan monipuoliset sähköpyörät (GPS-seurantalaitteet, varkaudenestolaitteet, useat avustinanturit jne.). Sen sijaan, että jokainen uusi laite tarvitsisi erillisen johdotusyhteyden ohjaimeen, laite voi liittyä yhteiseen väylään ja jakaa tietoja kaikkien muiden kanssa. Tämä skaalautuvuus on keskeinen syy siihen, että nykyaikaiset huippuluokan sähköpyörät ovat siirtymässä CAN-väylään.
Yhteenvetona voidaan todeta, että viestintäprotokolla on sähköpyörän sähköjärjestelmän selkäranka, jolla varmistetaan, että kaikki elektroniset osat toimivat yhdessä. Toisessa postauksessa perehdymme kahteen tärkeimpään protokollatyyppiin (UART ja CAN) ja tarkastelemme, miten kumpikin toimii ja mitä käyttötarkoituksia niillä on sähköpyörissä. sähkökäyttöiset lastipyörät. tarkista, jos olet kiinnostunut:
- "UARTin ymmärtäminen sähköpyörissä: E-bike-tietokoneiden käyttö: Miten yksinkertainen sarjakommunikointi antaa voimaa ajamiseen"
- Aloittelijoille suunnattu opas siitä, miten UART mahdollistaa perusdatan vaihdon sähköpyörän komponenttien, kuten näyttöjen ja ohjainten, välillä.
- "Mikä on CAN-väylä sähköpyörissä? Älykkäämpi tapa liittää akkuja, antureita ja muuta"
- Opi, miten nykyaikaiset sähköpyörät käyttävät CAN-väylää tukemaan useiden laitteiden välistä viestintää, kehittyneitä näyttöjä ja järjestelmädiagnostiikkaa.
Sovellusskenaariot: Mikä viestintäprotokolla sopii mihinkin sähköpyörään?
On hyödyllistä ymmärtää, miten UART ja CAN valitaan käytännössä eri sähköpyörämalleissa. Tarkastelemme kahta laajaa luokkaa: kuluttajien sähköpyörät (mukaan lukien tyypilliset työmatka- tai vapaa-ajan polkupyörät). ja lasti-/laivaston e-pyörät (käytetään usein yritystoimituksissa tai vuokrauskalustossa).ja toteaa, että näillä on usein erilaiset painopisteet.

- Tavalliset kuluttajien sähköpyörät (kaupunki-, maasto- ja maantiepyörät): Nämä ovat pyöriä, joita monet yksityishenkilöt ostavat henkilökohtaiseen käyttöön. Ne vaihtelevat perustasosta erittäin korkealuokkaisiin. Alemmassa hintaluokassa (kustannustehokkaissa malleissa) UART-kommunikointi on erittäin yleistä. Esimerkiksi yksinkertaisessa 36 voltin työmatkapyörässä, jossa on poljinkierrosanturi ja perus-LED-näyttö, käytetään todennäköisesti UART:ia (tai jopa analogisia signaaleja) ohjaimen ja sen minimaalisen näytön välillä. Tässä keskitytään kustannustehokkuus ja perustoiminnallisuus. Monissa tällaisissa pyörissä käytetään laajalti saatavilla olevia ohjaimia ja näyttöjä, jotka noudattavat käytännössä UART-protokollaa, mikä tarkoittaa, että pyörämerkit voivat hankkia komponentteja eri alkuperäisvalmistajilta. Tämä on houkuttelevaa B2B-ostajille, jotka haluavat joustavuutta käyttää esimerkiksi hienompaa näyttöä A-toimittajalta ja ohjainta B-toimittajalta - kunhan molemmat puhuvat UART-protokollaa samassa muodossa, se voi toimia (vaikka yhteensopivuus on tarkistettava nastojen ja laiteohjelmiston osalta). Korkeamman hintaluokan kuluttajapyörissä, erityisesti suurten merkkien valmistamissa, on suuntaus kohti CAN-väylää. Suorituskykyiset e-MTB- tai e-road-pyörät, joissa on vääntömomenttianturit ja hienot näytöt, saattavat käyttää CAN-väylää kaiken sujuvan integroinnin varmistamiseksi. Jotkin merkit käyttävät kuitenkin edelleen UARTia tai muita omia sarjaliikenneyhteyksiä jopa huippuluokan pyörissä; se vaihtelee valmistajittain ja niiden suunnittelufilosofian mukaan.

- E-polkupyörät ja kaupalliset laivastot: Cargo e-pyörät on suunniteltu raskaiden kuormien tai matkustajien kuljettamiseen, ja niitä käyttävät usein yritykset (jakelupalvelut, postipyörät jne.). Näillä pyörillä on tapana asettaa etusijalle kestävyys, turvallisuus ja kalustonhallintaominaisuudet elektroniikan kustannuksista. Tällä segmentillä CAN-väylä on todella saanut jalansijaa. Esimerkiksi tavarapyörissä voi olla kaksoisakut toimintasäteen pidentäminen - kahden akun hallinta edellyttää kommunikaatiota, jotta purkautuminen voidaan tasapainottaa tai ainakin ilmoittaa kummankin akun tila. CAN helpottaa sitä, että yksi ohjain voi kommunikoida kahden BMS-yksikön (yksi kummassakin akussa) kanssa samassa väylässä. Tavarapyörissä voi olla myös lisävarusteita: jarruvalot, vilkut, jopa elektroniset lukot - niiden koordinointi keskusväylän kautta yksinkertaistaa johdotusta ja ohjausta. Koska sähkökäyttöisiä tavarapyöriä käytetään usein laivastoissa, yritykset haluavat lisäksi, että niillä on telematiikka niihin: GPS-seurantalaitteet, jotka voivat ilmoittaa pyörän sijainnin, käytön ja mahdolliset viat. CAN-yhteensopivassa järjestelmässä telematiikkamoduuli voi yksinkertaisesti salakuunnella CAN-viestejä nopeudesta, akun tilasta jne. ja ladata tiedot. Eräässä tapaustutkimuksessa, jossa oli mukana eurooppalainen jakelukuljetuskalusto, osoitettiin, että CAN-väylään kytkeytyminen mahdollisti huoltotietojen (kuten ajokilometrien) etäseurannan, moottorin etäkäytön poistamisen käytöstä varkaudenestoa varten ja pyörän laiteohjelmiston päivittämisen ilman kautta - nämä toiminnot ovat erittäin hyödyllisiä ajoneuvokannan hallinnoinnissa. Tämä olisi hankalaa toteuttaa UART-pohjaisessa pyörässä.
- Yhdistelmä- ja yhdistelmäjärjestelmät vs. integroidut järjestelmät: Jos sähköpyörämerkki haluaa vapautta sekoittaa komponentteja tai sallia jälkimarkkinapäivityksiä, se käyttää yleensä UART-pohjaisia järjestelmiä. Näimme, että UART-järjestelmät mahdollistavat näyttöjen vaihtamisen tai moottorin asetusten säätämisen helposti.. Pienempi sähköpyöräyritys saattaa suosia tätä reittiä välttääkseen sitoutumisen yhteen toimittajaan - se voi vaihtaa moottorin/ohjaimen toimittajaa muuttamatta koko ekosysteemiä, kunhan protokolla pysyy UART-protokollana ja se voi mukauttaa laiteohjelmistoa. Toisaalta, Järjestelmän optimointiin ja vaatimustenmukaisuuteen keskittyvät tuotemerkit valitsevat usein CAN:n. Esimerkiksi Boschin sähköpyörät käyttävät CANin kaltaista väylää (Boschilla on oma CAN-pohjainen protokolla), joka yhdistää moottorin, näytön ja akun. Näin varmistetaan, että mikään kolmannen osapuolen osa ei voi häiritä, vaan kaikki on hienosäädetty yhteen. Tästä on seurauksena erinomainen luotettavuus ja turvallisuus - järjestelmä antaa virheilmoituksen, jos jokin asia ei ole kunnossa. Huonona puolena on se, että B2B-ostajana (kuten Boschin valinnut polkupyörän alkuperäinen valmistaja) sitoudut ostamaan moottorin, ohjaimen, akun, näytön ja näytön. kaikki Boschilta pakettina.
- Tavarapyörät - erityishuomioita: Tavarapyöriä valvotaan etenkin EU:ssa usein tiukemmin, koska niillä saatetaan kuljettaa raskaampia kuormia tai jopa matkustajia. Esimerkiksi Saksassa on olemassa standardi (DIN 79010), joka koskee erityisesti tavarapyörien turvallisuutta (lähinnä mekaanisia näkökohtia, kuten rungon lujuutta ja jarruja). Vaikka kyseinen standardi ei sanele viestintäprotokollia, on turvallisuus etusijalla -ajattelutapa kuormapyörissä kannustetaan käyttämään protokollaa, jolla voidaan varmistaa esimerkiksi, että jos jokin menee pieleen (moottorin ylikuumeneminen tai akun tyhjeneminen), järjestelmä voi ilmoittaa siitä ja ryhtyä toimiin. CAN:n kestävyys ja virheenkäsittely auttavat saavuttamaan nämä turvallisuustavoitteet. Lisäksi sähkökäyttöiset lastipyörät toimivat usein kaupunkiympäristössä (toimitukset kaupungeissa), jossa on paljon radio-/sähköhäiriöitä ja jossa on paljon vaaraa, jos viestintävirhe tapahtuu väärään aikaan. . CAN-järjestelmän häiriönsietokyky on suuri etu, sillä se estää väärinkäytöksiä, jotka voivat johtaa epäsäännölliseen käyttäytymiseen.


Sähköjärjestelmän turvallisuusstandardit ja vaatimustenmukaisuus (EU/USA)
Käytetystä viestintäprotokollasta riippumatta sähköpyörän sähköjärjestelmien on noudatettava turvallisuusstandardeja, jotta ne toimivat turvallisesti ja laillisesti erityisesti Euroopan ja Yhdysvaltojen kaltaisilla keskeisillä markkinoilla. Viestintäprotokolla voi epäsuorasti vaikuttaa pyörän vaatimustenmukaisuuteen - esimerkiksi protokolla, joka sallii rajoittamattomat käyttäjämuutokset, voi aiheuttaa vaatimustenmukaisuusriskin, kun taas lukittu protokolla voi auttaa varmistamaan, että pyörä pysyy laillisissa rajoissa. Seuraavassa eritellään asiaankuuluvat standardit ja niiden suhde toisiinsa:
Miten viestintäprotokollat vaikuttavat sähköpyörän vaatimustenmukaisuuteen Euroopan unionissa?
Euroopan unioni (EU) - EN 15194: EU:ssa useimmat sähköpyörät (poljinavusteiset polkupyörät, joiden moottorin teho on <= 250 W ja joiden apu katkeaa 25 km/h:ssa) luokitellaan seuraavasti EPAC:t (sähköisesti tehoavusteiset syklit). Standardi EN 15194 sovelletaan EPAC-laitteisiin, ja siinä määritellään turvallisuutta ja suorituskykyä koskevat vaatimukset ja testausmenetelmät . Tähän sisältyy mekaaninen turvallisuus (jarrut, runko jne.) ja sähköturvallisuus (johdotukset, sähkömagneettinen yhteensopivuus jne.) sekä sen varmistaminen, että pyörä täyttää nopeus- ja tehorajat.
- Viestintäprotokollien osalta yksi olennainen näkökohta on seuraava. sähkömagneettinen yhteensopivuus (EMC): Järjestelmä ei saa aiheuttaa liiallisia häiriöitä tai häiriöt eivät saa vaikuttaa siihen kohtuuttomasti. Hyvin suunnitellun CAN- tai UART-viestintälinjan pitäisi läpäistä EMC-testit (EN 15194 viittaa EN 55014:ään tai vastaavaan EMC:n osalta). Osoitteessa CAN-järjestelmän melunkestävyys voi olla etu näiden EMC-vaatimusten täyttämisessä, koska se käsittelee melua luonnostaan paremmin, mutta myös UART-järjestelmät voivat täyttää vaatimukset, jos ne on suojattu asianmukaisesti.
- Nopeuden ja tehon peukalointi: EN 15194 edellyttää, että avustin katkeaa 25 km/h:n nopeudessa ja että käyttäjä ei voi helposti säätää tätä rajaa yli lakisääteisen arvon. Jos pyörä käyttää UART-taajuusmuuttajaa ja valmistaja jättää ohjelmointipaneelit saataville, käyttäjä voi voisi mahdollisesti poistaa rajoitukset - tämä saattaa aiheuttaa ongelmia sääntöjen noudattamisessa. Jotkut valmistajat käyttävätkin lukittuja CAN-järjestelmiä estääkseen käyttäjiä muuttamasta nopeusrajoitusta. Esimerkiksi Bafangin CAN-pohjaisissa moottoreissa nopeusrajoitus on kiinteä eikä sitä voi muuttaa näytön kautta, mikä auttaa varmistamaan säännösten noudattamisen heti laatikosta lähtien. Sitä vastoin monissa UART-järjestelmissä nokkela käyttäjä voi siirtyä näytön asetustilaan ja säätää pyörän kokoa tai nopeusrajoitusta tai käyttää ohjelmointikaapelia, mikä saattaa rikkoa lain kirjainta, jos pyörä ylittää 25 km/h avustuksen.
- Sähköturvallisuus: EN 15194 (viimeisimmät tarkistukset) kattaa sähköturvallisuuden perusasiat, mutta mielenkiintoista on se, että ei kata täysin akun turvallisuutta - se edellyttää, että akkupaketin on oltava muiden standardien mukainen. Siinä keskitytään enemmän integrointiin, johdotukseen ja perussuojaukseen (kuten siihen, ettei alttiina olevia jännitteisiä osia ole jne.). Tietoliikenneprotokolla ei vaikuta tähän suoraan, mutta välillisesti CAN:n kaltainen protokolla, jonka avulla BMS voi keskustella ohjaimen kanssa, voi parantaa turvallisuutta - esimerkiksi BMS voi lähettää "lopeta purkaus"-käskyn, jos akku ylikuumenee. Vaikka EN 15194 -standardi ei edellytä tällaista toimintoa, se auttaa pyörää täyttämään yleiset turvallisuusodotukset (lämpökatkojen välttäminen).
Lisäksi eurooppalaisten sähkökäyttöisten tavarapyörien (erityisesti niiden, jotka kuljettavat tavaroita/matkustajia) on ehkä täytettävä seuraavat vaatimukset. Konedirektiivi jos ne eivät varsinaisesti kuulu polkupyöräsääntöjen piiriin (jotkin raskaat tavarapyörät kuuluvat niihin). Tämä korostaa jälleen kerran vankkoja vikasietoisuuksia. Vankka viestintäprotokolla, jossa on vikasietoinen käyttäytyminen (kuten CAN:n sammuttaminen vian sattuessa), voi auttaa vaatimusten noudattamisessa.
Lisätietoja Sähköpyörän EU-standardi
Miten viestintäprotokollat vaikuttavat sähköpyörän vaatimustenmukaisuuteen Yhdysvalloissa?
Yhdysvallat - UL 2849 ja muut: Yhdysvalloissa sähköpyörien valmistusta säännellään liittovaltion tasolla hieman vähemmän suorituskyvyn osalta (kuluttajatuotemääritelmän mukaan hidaskäyntinen sähköpyörä on maksimissaan 750W ja 20 mph kaasulla / 28 mph poljinavustimella, mutta liittovaltion tasolla ei ole pakollisia rakentamisstandardeja). Kuitenkin, turvallisuussertifioinnista on tulossa ratkaisevan tärkeääerityisesti akkujen aiheuttamien tulipalohuolien vuoksi.
- UL 2849 on Pohjois-Amerikan johtava sähköpyörien sähköjärjestelmien turvallisuusstandardi. Se kattaa sähköpyörän koko sähköisen käyttöjärjestelmän, mukaan lukien akku, moottori, laturi ja kaikki liitännät. UL 2849 -testauksessa tarkastellaan muun muassa sitä, kestääkö johdotus virrat, onko järjestelmä suojattu oikosulkuja vastaan, ja mikä tärkeintä, se sisältää myös seuraavat seikat UL 2271 akuille (joka on akkukohtainen turvallisuusstandardi). Viestinnän osalta UL 2849:ssä ei määrätä protokollaa, mutta siinä tarkistetaan, että esimerkiksi jos viestintä katkeaa tai havaitaan vika, järjestelmä kaatuu turvallisesti (ei lämpötapahtumia, ei karkaavaa moottoria). CAN-pohjaisella järjestelmällä saattaa olla pieni etulyöntiasema redundanssin osoittamisessa (esim. jos kaasuviesti katoaa, CAN voi havaita sen ja keskeyttää sen asianmukaisesti). Mutta jopa UART-järjestelmät voidaan suunnitella siten, että ne täyttävät UL 2849 -standardin vaatimukset (niiden on vain käsiteltävä vikoja perusteellisesti ohjaimen laiteohjelmistossa).
- Tulipalojen ja sähköiskujen ehkäisy: Standardeissa, kuten UL 2849, keskitytään sähköpalojen ja sähköiskujen ehkäisemiseen. Jos esimerkiksi sähköpyörään on kytketty laturi, akun ja laturin välinen tiedonsiirto (jos sellainen on) ei saa johtaa ylilataukseen. Huomionarvoista on, että EnergyBus-standardi mainitsemamme CAN-pohjainen järjestelmä perustuu osittain turvallisuuteen - sen varmistaminen, että mikä tahansa laturi voi ladata minkä tahansa akun turvallisesti kommunikoimalla CANopenin kautta ja ottamalla virran käyttöön vain, kun asianmukainen kättely on suoritettu. EnergyBus käyttää erityistä liitintä, joka sisältää CAN-tietojohdot, jotta laturi ja akku kommunikoivat ensin ja antavat sitten latausvirran käyttöön, jotta vältetään kipinät tai epäsopivat jännitteet. Tämä konsepti vastaa hyvin UL:n turvallisuuslogiikkaa. Jos tuotemerkki käyttää EnergyBus -järjestelmää, se todennäköisesti auttaa turvallisuussertifioinnin läpäisemisessä, koska se hallitsee luonnostaan komponenttien välistä turvallista vuorovaikutusta.
- Säädösten noudattaminen (nopeus/teho): Yhdysvalloissa luokkajärjestelmä (luokkien 1, 2 ja 3 sähköpyörät) on pitkälti kunniajärjestelmä eikä sitä valvota yhtä tiukasti kuin EU:n rajoituksia, mutta vastuullisuussyistä valmistajat varmistavat yleensä, että luokan 2 sähköpyörää ei voi helposti muuttaa niin, että se ylittäisi esimerkiksi 20 mailin tuntinopeuden kaasulla. Tässäkin asiassa suljetun CAN-protokollan käyttö voi auttaa - käyttäjät eivät voi vain kytkeä kaapelia ja purkaa rajoituksia. On huomionarvoista, että monet sähköpyöräyhtiöt mainostavat nykyään UL-sertifioituja akkuja tai järjestelmiä asiakkaiden turvallisuuden takaamiseksi. Esimerkiksi HOVSCO (kuten heidän tietopankissaan näkyy) korostaa, että heidän pyöränsä täyttävät sähköturvallisuuden osalta UL 2849 -standardin ja yleisen turvallisuuden osalta EN 15194 -standardin vaatimukset. Tämä tarkoittaa, että niiden johdotuksen, liittimien ja tietoliikenteen on toimittava vaaroja aiheuttamatta.
Kansainväliset ja muut standardit: EN 15194:n ja UL 2849:n lisäksi on olemassa muitakin asiaankuuluvia standardeja - esim. seuraavat, ISO 4210 (polkupyörän turvallisuusstandardi), jossa on sähköpyörävaatimuksia koskeva osa, ja Saksan DIN 79010 tavarapyörien osalta (joka, kuten totesimme, kattaa esimerkiksi rungon lujuuden tavarakuormissa ja jarrutustehon) . Nämä eivät suoraan sanele elektroniikkaa, mutta rahtipyörästandardi saattaa implisiittisesti vaatia, että esimerkiksi avustin ei saa toimia huonosti raskaassa kuormituksessa. Vankka tiedonsiirto varmistaa, että vaikka pyörä rasittuisi (ja ehkä sähköhäiriöt lisääntyisivät tai akku notkahtaisi), akun, ohjaimen ja antureiden väliset signaalit pysyvät luotettavina.
Yhteenvetona, vaatimustenmukaisuus ja turvallisuus vaikuttavat joihinkin suunnittelupäätöksiin UARTin ja CANin välillä.. Valmistaja, joka pyrkii mahdollisimman suureen turvallisuuteen, saattaa käyttää CAN-järjestelmää virheiden tarkistuksen ja valvonnan vuoksi tai toteuttaa UART-järjestelmissä ylimääräisiä suojatoimia. Molemmat protokollat voivat olla osa turvallista suunnittelua, mutta niiden käyttötapa on avainasemassa. . CAN-järjestelmien suljettu luonne voi pakottaa noudattamaan sääntöjä (esim. nopeusrajoitukset, joita käyttäjät eivät voi säätää, kuten laki edellyttää) , kun taas UART-järjestelmät tarjoavat enemmän käyttäjän vapautta, mikä on kaksiteräinen miekka.. Valmistajien on varmistettava, että jopa UART-pohjaisissa polkupyörissä on fyysinen tai ohjelmallinen rajoitin, jota ei voi helposti hakkeroida, jotta ne pysyisivät laillisissa rajoissa.
Lopuksi, protokollasta riippumatta, käyttämällä laadukkaat liittimet ja johdot on osa vaatimustenmukaisuutta. EU:ssa pyörän on kestettävä tärinää ilman, että johdot irtoavat, ja märissä olosuhteissa ilman oikosulkuja. Higo/Juletin kaltaiset liittimet (vesitiiviit liittimet, joita käytetään laajalti sähköpyörissä) ovat suosittuja paitsi helppokäyttöisyyden vuoksi myös siksi, että ne auttavat täyttämään vaatimukset. IP-luokitukset ja luotettavuusvaatimukset. CAN-väylässä käytetään tyypillisesti tällaisia liittimiä (esimerkiksi yksi Higo 4- tai 5-nastainen liitin voi välittää CAN-tiedot ja virran näytölle). Protokollan valinta ei muuta tarvetta hyvään vedonpoisto, eristys ja lukitusliittimet estääksesi kytkentöjen katkeamisen (mikä voi olla vaarallista, jos esimerkiksi jarrun katkaisusignaali ei saavuta ohjainta, koska kaapeli on irronnut).
Tämän jakson lopuksi todettakoon, että sekä Euroopassa että Yhdysvalloissa kiinnitetään nyt erityistä huomiota sähköpyöräilyn turvallisuuteen. EN 15194:n ja UL 2849:n kaltaisten standardien noudattaminen on hyvämaineisille tuotemerkeille yhä tärkeämpää. Viestintäprotokolla on yksi palapelin osa - keino varmistaa sähköjärjestelmän koordinointi ja vikasietoisuus. CAN-väylän luotettavuus voi auttaa täyttämään nämä standardit tarjoamalla vankan viestinnän, kun taas UART-järjestelmät vaativat huolellista suunnittelua ollakseen yhtä turvallisia. Valmistajat valitsevat usein protokollan, joka vastaa parhaiten vaatimustenmukaisuusstrategiaa: UART yksinkertaisempiin malleihin, joissa riski on helposti hallittavissa, tai CAN monimutkaisiin järjestelmiin, joissa sen turvallisuusominaisuudet loistavat.
Kustannukset ja markkinaharkinta viestintäprotokollia valittaessa
Kun päätetään viestintäprotokollien välillä (tai yleensä sähköpyörän sähköjärjestelmää suunniteltaessa), kustannukset ovat tärkeä tekijä - eivät pelkästään rahalliset kustannukset, vaan myös joustavuuden ja toimittajasuhteiden "kustannukset". Tässä kerrotaan, miten kustannuksia verrataan keskenään ja mitä B2B-ostajat tai -insinöörit ottavat huomioon:
- Laitteiston kustannukset: Kuten aiemmin todettiin, UART-pohjaisessa järjestelmässä käytetään yleensä yksinkertaisempaa laitteistoa. Ohjain ja näyttö tarvitsevat vain UART-ominaisuuden, joka on sisäänrakennettuna lähes kaikissa mikrokontrollereissa. Kaapelointi saattaa olla hieman yksinkertaisempaa (vähemmän päätteitä jne.). CAN-pohjainen järjestelmä vaatii hieman enemmän: CAN-lähetin- ja vastaanottosiru jokaista laitetta varten ja mahdollisesti tehokkaampi MCU (vaikka nykyään jopa melko halvoissa MCU:issa on sisäänrakennettu CAN). Todellinen BOM-ero (Bill of Materials) voi olla vain muutaman dollarin luokkaa pyörää kohti suurissa erissä, mutta kilpailluilla markkinoilla sillä on silti merkitystä. Suuren pyöräkannan tilauksessa nämä dollarit moninkertaistuvat. Tästä huolimatta CAN-laitteistojen kustannukset ovat laskeneet merkittävästi, ja vaihtokauppa saattaa olla helposti perusteltavissa CAN:n tarjoamilla lisätoiminnoilla.
- Kehitys- ja integrointikustannukset: Sähköpyöräilyn käynnistysvaiheessa olevalle yritykselle tai pienelle yritykselle CAN-pohjaisen järjestelmän kehittäminen tyhjästä voi olla kallista, jos yrityksellä ei ole omaa asiantuntemusta. Se saattaa edellyttää CAN-järjestelmään perehtyneiden sulautettujen järjestelmien insinöörien palkkaamista, investointeja työkaluihin ja aikaa mukautetun laiteohjelmiston kehittämiseen. Vaihtoehtoisesti, jos he ostavat valmiin järjestelmän (kuten Boschin tai Shimanon CAN-pohjaiset voimansiirtoyksiköt), heidän kehityskustannuksensa ovat alhaisemmat, mutta yksikkökustannukset ovat korkeammat (Boschin järjestelmät ovat kalliimpia osittain siksi, että he saavat täysin integroidun ratkaisun ja tuotemerkin nimen). A UART-järjestelmä voidaan usein koota valmiista komponenteista. joiden yhteensopivuus tunnetaan - esimerkiksi monet yritykset käyttävät avoimen lähdekoodin tai standardiprotokollia, joissa suuri osa suunnittelusta on jo tehty ja riski on pienempi. B2B-ostajalle (esimerkiksi yritykselle, joka haluaa useita sähköpyöriä tuotemerkkinsä alle) UART:n käyttö saattaa tarkoittaa, että se voi hankkia halvempia geneerisiä osia, kun taas CAN:n käyttö tarkoittaa usein sitoutumista tietyn toimittajan ekosysteemiin (joka saattaa periä lisenssejä tai korkeampia hintoja).
- Myynnin jälkeiset ja ylläpitokustannukset: Tämä jätetään joskus huomiotta. Kaluston ylläpitäjä (kuten pyöräosake- tai jakeluyritys) saattaa huomata, että CAN-väyläiset polkupyörät säästävät rahaa huollossa. Miksi? Koska he voivat diagnosoida ongelmat etänä tai nopeammin. CAN-yhteydellä varustettu järjestelmä voi ilmoittaa virhekoodit yksityiskohtaisesti (esimerkiksi "akun #2 lämpötila-anturin vika" erityisenä koodina). Teknikot voivat kytkeä diagnostiikkatyökalut CAN-väylään ja paikallistaa ongelmat. Tämä voi vähentää työaikaa. Kuten IoT Venture -tapauksessa on nähty, myös laiteohjelmiston etäpäivitykset ovat mahdollisia, mikä voi säästää kustannuksia, joita aiheutuu pyörien fyysisestä kutsumisesta takaisin tiettyjä korjauksia varten. Toisaalta UART-pyörän alkuhuolto saattaa olla yksinkertaisempaa (ehkä vähemmän asioita, jotka menevät pieleen kommunikaatiossa), mutta jos jokin on vialla, joudut ehkä kokeilemaan ja erehtymään osien vaihtamisessa, koska järjestelmä ei voi kertoa tarkalleen, mikä on vialla, paitsi ehkä vilkkuvan LEDin vilkuttaminen. Yksittäiselle kuluttajalle UART-pyörän korjaaminen voi olla halvempaa, koska hän voi käyttää korjaamiseen valmiita osia ja yhteisön tietoa, kun taas CAN-pyörän korjaaminen voi olla pakollista valtuutetun huoltopalvelun kautta (mikä voi olla kalliimpaa). Kustannukset ovat siis tasapainossa seuraavien tekijöiden välillä käyttäjän huollettavuus (UART voittaa) ja kehittynyt diagnostiikkatuki (CAN voittaa, mikä voi alentaa asiantuntijapalvelukustannuksia).
- Lisenssi- ja omistuskustannukset: Omistetun CAN-protokollan käyttäminen voi aiheuttaa lisenssimaksuja tai rajoituksia. Jos pyörämerkki kehittää oman CAN-protokollan, se on hyvä asia, mutta jos se käyttää CANopenin tai EnergyBusin kaltaista protokollaa, sen on ehkä noudatettava standardeja ja mahdollisesti liityttävä yhdistyksiin (esim. EnergyBus e.V.). Nämä kustannukset ovat yleensä pieniä, mutta ne on syytä huomioida. Boschin kaltaiset omat järjestelmät tarkoittavat käytännössä sitä, että pyörän alkuperäinen valmistaja ostaa voimansiirtoyksiköt pakettina; Bosch määrää hinnan. UART-järjestelmissä osatoimittajien välillä on usein enemmän kilpailua, mikä voi alentaa hintoja.
- Asiakkaiden käsitys ja arvo: Markkinointinäkökulmasta tuotemerkki saattaa perustella korkeampaa hintaa pyörälle, jossa on "autoteollisuuden CAN-väyläelektroniikka", koska se kuulostaa edistykselliseltä ja luotettavalta (vaikka asiakas ei suoraan huomaisikaan eroa). Arvoa on myös ensiluokkainen tuntuma ja suorituskyky jotka CAN-järjestelmissä usein ovat mukana (ne ovat yleensä pyörissä, joissa on myös korkealaatuiset moottorit jne.). Korkeamman hintaluokan markkinoille tai kaupallisille asiakkaille suunnatut tuotemerkit voivat siis hyödyntää CAN-järjestelmää osana korkealaatuista tarjontaa. Alkutason sähköpyörissä asiakkaat taas välittävät lähinnä siitä, että se toimii ja on edullinen - he eivät maksa lisämaksua vain siksi, että pyörän näyttö käyttää CAN- eikä UART-järjestelmää. Niinpä, protokollan valinnan olisi vastattava pyörän markkinasegmenttiä..
- Tulevaisuuden turvaaminen: Insinöörien huomioon ottama kustannus on tulevaisuudenkestävyyden puutteen aiheuttamat vaihtoehtoiskustannukset. Jos investoit UART-pohjaiseen alustaan nyt, mutta haluat ensi vuonna lisätä uusia ominaisuuksia (esimerkiksi toisen akun tai uuden anturityypin), saatat kokea vanhan alustan rajoittavaksi ja joutua suunnittelemaan sen uudelleen. Jotkin yritykset päättävät, että pitkällä aikavälillä on kustannustehokkaampaa käyttää alusta alkaen CAN-alustaa, vaikka sitä ei käytettäisikään täysin, jotta uusille ominaisuuksille ja lisävarusteille jäisi tilaa. Näin voidaan säästää uudelleenkehityskustannuksia myöhemmin. Kyseessä on strateginen päätös: maksaa hieman enemmän etukäteen kuin mahdollisesti paljon enemmän myöhemmin päivittämisestä.
Mitä tulee todellisiin hintalukuihin: sitä on vaikea määritellä, mutta alan sisäpiiriläinen saattaisi sanoa, että esimerkiksi perus UART-verkkopyöräohjain + näyttösarja voisi olla irtotavarana vaikkapa $50-$100, kun taas vastaava CAN-pohjainen sarja isolta tuotemerkiltä voisi olla muutaman sadan dollarin hintainen (koska se on kehittyneempi). Tuohon eroon sisältyy kuitenkin usein myös parempi moottorin suorituskyky, takuu jne., ei vain kommunikaatioero. . lisäkustannukset pelkästään protokollan osalta (esim. CAN-sirun lisääminen) on pieni, mutta se on ekosysteemin kustannukset (kalliiseen järjestelmään liittäminen verrattuna halpaan geneeriseen järjestelmään) voi olla suuri.
Selkeästi sanottuna B2B-e-pyörän ostajalle:
- Jos etusijalla on alhaisin yksikkökustannus ja haluat joustavuutta hankkia useilta toimittajilta, on mahdollista käyttää UART-pohjainen avoin järjestelmä on houkutteleva. Voit etsiä sopivia näyttöjä ja ohjaimia ja mahdollisesti jopa neuvotella useiden tehtaiden kanssa.
- Jos etusijalla on suorituskyky, luotettavuus ja avaimet käteen - järjestelmä (ja olet halukas maksamaan siitä), a CAN-pohjainen järjestelmä hyvämaineiselta toimittajalta saattaa säästää päänvaivaa ja tuoda lisäarvoa tuotteellesi (korkeammilla kustannuksilla, jotka toivottavasti saat takaisin hinnoittelemalla pyöräsi korkeampaan hintaan tai volyymitehokkuuden avulla).
Rajoitukset ja tulevat suuntaukset
Vaikka me ylistämme UARTin ja CANin hyveitä, on syytä huomioida, että sähköpyöräviestinnän nykytilan rajoitukset ja mihin asiat saattavat olla menossa:
- Teollisuuden laajuisen standardoinnin puute: Toisin kuin automaailmassa, jossa lähes kaikissa autoissa käytetään CAN-väylää ja standardoitua diagnostiikkaa (OBD-II), sähköpyöräteollisuus on edelleen hajanainen. On olemassa ei yhtä yleispätevää protokollaa jota kaikki sähköpyörät käyttävät. UART-toteutukset vaihtelevat (kullakin valmistajalla voi olla eri dataformaatit UART:n kautta), ja CAN-toteutukset ovat usein patentoituja. Tämä rajoittaa kuluttajia ja polkupyörien kokoonpanijoita - eri merkkien välillä ei ole "plug and play" -toimintoa. Et voi ottaa satunnaista näyttöä ja odottaa sen toimivan satunnaisen ohjaimen kanssa, elleivät ne nimenomaisesti käytä samaa protokollaa ja laiteohjelmistoa. EnergyBus on lupaava pyrkimys standardointiin (CANopen CiA-454 määrittelee sähköpyöräkomponenttien viestit), mutta se ei ole vielä laajalle levinnyt. Jos EnergyBus tai vastaavat standardit saavat jalansijaa, saatamme nähdä aidosti yhteentoimivia komponentteja - esimerkiksi valmistajan X akkua voidaan käyttää valmistajan Y moottorijärjestelmän kanssa, ja CANopen-pohjainen protokolla varmistaa, että ne ymmärtävät toisiaan. Tämä hyödyttäisi B2B-ostajia (enemmän toimittajavaihtoehtoja) ja kuluttajia (enemmän päivitys- ja korjausvaihtoehtoja). Alan toimijoilla on kuitenkin myös liiketoiminnallisia motiiveja ylläpitää omia järjestelmiä (asiakkaiden sitouttaminen). Jännite seuraavien tekijöiden välillä standardointi vs. oma valvonta määrittelee sähköpyöräprotokollien tulevaisuuden.
- Kaistanleveys ja tietotarpeet: Tällä hetkellä sähköpyöräilyn tiedonsiirto on suhteellisen vähätietoista. Tulevaisuuden sähköpyörät voivat kuitenkin välittää enemmän tietoa - kuvittele, että kerätään korkeataajuisia vääntömomenttianturitietoja tai korkearesoluutioisia tehomittareita koulutustarkoituksiin tai jopa kameroiden videokuvaa turvallisuuden takaamiseksi. CAN-verkko saattaa muodostua pullonkaulaksi, jos dataa on lähetettävä paljon. Autoteollisuudessa on käytössä CAN-FD (laajennettu versio CAN:stä, jossa on suuremmat datakehykset ja suurempi läpäisykyky) ja muita protokollia, kuten Ethernet, suuren kaistanleveyden tarpeisiin. Sähköpyöräilijöille voitaisiin tarvittaessa ottaa käyttöön CAN-FD tai BLE/Wi-Fi tietolokien siirtoa varten. Langaton viestintä saattavat myös täydentää langallisia protokollia: jo nyt monet sähköpyörät käyttävät Bluetooth Low Energy -tekniikkaa pyörän yhdistämiseksi älypuhelinsovellukseen. Tämä ei kuulu sisäisen sähköjärjestelmän piiriin, mutta se on syytä huomioida rinnakkaiskanavana. Tulevaisuudessa jotkut yksinkertaisemmat sähköpyörät saattaisivat ehkä jopa luopua langallisesta näytöstä ja käyttää langatonta moduulia puhelimeen - vaikka kriittiset ohjaussignaalit (kuten kaasu- tai jarrusignaalit) pysyisivätkin todennäköisesti langallisina luotettavuuden vuoksi. Rahtilaivastoissa saatetaan nähdä enemmän V2X-viestinnän (vehicle-to-everything) integrointia - sähköpyörät keskustelevat logistiikkajärjestelmien tai liikenneinfrastruktuurin kanssa, ja tämäkin olisi CAN-väyläjärjestelmän päälle rakennettava kerros.
- Turvallisuusnäkökohdat: Kun sähköpyörät kytketään toisiinsa ja ne käyttävät monimutkaisempaa viestintää, kyberturvallisuus tulee huolenaiheeksi. UART-järjestelmä, jossa ei ole ulkoista liitäntää, on käytännössä immuuni hakkeroinnille (jonkun pitäisi fyysisesti napauttaa johdot). Mutta CAN-väylä, joka on liitetty Bluetooth-moduuliin tai GSM-moduuliin (ajoneuvokannan seurantaa varten), tuo mukanaan mahdollisia haavoittuvuuksia. Valmistajien on varmistettava, että niiden protokollat (erityisesti langattomat liitännät väylään) ovat turvallisia, jotta estetään ilkivaltainen ohjaus (kuvittele IoT-hakkerointi, joka voisi poistaa jakelupyöräkannan käytöstä etänä - kaukaa haettu mutta teoreettisesti mahdollinen skenaario, jos sitä ei ole suojattu). Omistusoikeudelliset protokollat ovat luonnostaan jokseenkin turvallisia hämäryyden kautta, mutta kun CAN tulee yleiseksi sähköpyörissä, pahantekijät voivat yrittää lähettää CAN-viestejä avoimen portin kautta. Näin ollen sähköpyörien viestinnässä saatetaan tulevaisuudessa käyttää enemmän salausta tai todentamista.
- Käyttäjäkokemus: Olipa protokolla mikä tahansa, sen pitäisi viime kädessä tarjota hyvä käyttäjäkokemus. Kuljettajat välittävät muun muassa sujuvasta virransiirrosta, näytön tarkoista tiedoista ja tarvittaessa toimivista turvatoiminnoista. Varhaisten CAN-pohjaisten järjestelmien rajoituksena oli, että ne olivat joskus liian lukittu - käyttäjät olivat turhautuneita, koska he eivät voineet muuttaa edes yksinkertaisia asetuksia. Järjestelmien kypsyessä valmistajat saattavat löytää keinoja antaa käyttäjille joustavuutta (valtuutettujen sovellusten tai asetusten kautta) ilman, että valvonta kärsii. Esimerkiksi sovellus voisi sallia rajoitetun virittämisen (turvallisissa rajoissa) jopa CAN-järjestelmässä tai sallia sertifioitujen kolmansien osapuolten lisävarusteiden kommunikoinnin väylällä (ehkä EnergyBus-standardin mukaisia viestejä käyttäen). Voimme odottaa hieman suurempaa avoimuutta protokollien standardoinnin myötä, ironista kyllä jopa CAN-maailmassa.
Lopuksi sähköisten polkupyörien sähköinen viestintäjärjestelmä - UART tai CAN - on ratkaisevan tärkeä pyörän suorituskyvyn, turvallisuuden ja modulaarisuuden kannalta.. Sähköpyöriä suunnittelevien insinöörien on tasapainotettava UART:n yksinkertaisuuden ja CAN:n monimutkaisuuden välillä. B2B-ostajien on pohdittava, miten valinta vaikuttaa kustannuksiin, toimitusketjuun ja tuotteen arvolupaukseen. Ala näyttää suuntautuvan CAN-väylän suuntaan, kun sähköpyörät kehittyvät yhä enemmän kytketyiksi ja kyvykkäämmiksi koneiksi, mutta UART-pohjaiset järjestelmät pysyvät todennäköisesti vielä jonkin aikaa rinnakkaisina yksinkertaisemmissa ja halvemmissa malleissa (ne ovat loppujen lopuksi "riittävän hyviä" suurelle osalle kuljettajista).
Ymmärtämällä näitä viestintäprotokollia - pohjimmiltaan siis sähköinen kieli sähköpyöristä - saa paljon syvemmän käsityksen siitä, miten sähköpyörä toimii sisäisesti. Kaasuvivun kääntämisestä tai polkimen painamisesta moottorin vauhtiin ja näytön numeroihin - kaikki tämä on mahdollista johtoja pitkin kulkevien bittien ja tavujen avulla, jotka varmistavat, että akku, moottori ja kuljettaja ovat synkronissa keskenään. Olipa kyseessä sitten tyylikäs kaupunkikäyttöön tarkoitettu sähköpyörä tai raskas tavarankuljetusauto, tämä harmonia saa ajamisen tuntumaan vaivattomalta ja turvalliselta. Loppujen lopuksi kaikkien protokollien tavoitteena on saada teknologia häivyttämään taustalle, jotta kuljettajat voivat yksinkertaisesti nauttia matkasta - mutta nyt toivottavasti hieman paremmin tietoisina siitä vaikuttavasta elektronisesta koordinoinnista, joka tapahtuu heidän jalkojensa alla.
Lähteet:
- Qiolor Ebike Guide - "Miten valita yhteensopiva näyttö Ebike-ohjaimeesi" (2025) - keskustellaan UART- ja CANBUS-kielistä ja yhteensopivien protokollien merkityksestä.
- Velco.tech - "CAN vs. UART: viestintätapojen erot" (2024) - selitetään UART:n yksinkertaisuus verrattuna CAN:n verkko-ominaisuuksiin ja luetellaan niiden edut/rajoitukset .
- Biktrix Help Center - "Mitkä ovat CANBUS- ja UART-protokollat?" - käyttäjäkeskeinen näkemys siitä, miten CAN lukitsee asetukset (nopeusrajoitus kiinteä) vs. UART mahdollistaa muutokset , sekä vertailu näyttöjen vaihdettavuudesta .
- IoT Venture (tapaustutkimus CYCLE-ajoneuvokannan kanssa) - CAN-integraation hyötyjen kuvaaminen sähköpyörälaivastoissa: huoltotietojen saatavuus, moottorin etäkäytöstä poistaminen, OTA-päivitykset .
- HOVSCO-osaaminen - "Mitä turvallisuusominaisuuksia sähköpolkupyörissä on?" "Mitä turvallisuusominaisuuksia sähköpolkupyörissä on?" - huomautukset EN 15194 (EU) -standardista, jolla varmistetaan nopeus- ja tehorajat sekä kestävyys, ja UL 2849 (USA) -standardista, jossa keskitytään sähkö- ja paloturvallisuuteen, sekä maininta DIN 79010 -standardista, joka koskee lastipyörien turvallisuutta.
- Texas Instruments App Note - "BLDC-moottoria käyttävän sähköpolkupyörän laitteistosuunnittelun näkökohdat" - tarjosi tyypillisiä sähköpyöräjärjestelmän lohkokaavioita ja käsityksen ohjauselektroniikasta.
- Letrigo Ebike Knowledge - "E-pyörän näytön johdotus selitetty" - yksityiskohtaiset tiedot johdotuksesta, liittimistä (Higo/Julet) ja varoittaa, että mitään yleismaailmallista johdotusstandardia ei ole olemassa, ja korostaa liitäntöjen asianmukaista yhteensovittamista ja vankkaa johdotusta signaalin eheyden varmistamiseksi .
- EnergyBus-standardi - Kvaserin esittely - EnergyBus on avoin CANopen-pohjainen standardi LEV-komponenteille, jolla varmistetaan yhteensopivuus ja turvallisuus eri valmistajien välillä .




