
Elektriske cykler (e-cykler), herunder lastcykler, er afhængige af et indviklet elektrisk system til at forbinde batteri, motor, controller, sensorer og brugergrænseflade. Dette systems kommunikationsprotokoller fungerer som det "sprog", der gør det muligt for alle disse komponenter at koordinere problemfrit. I denne populærvidenskabelige oversigt vil vi forklare, hvad disse kommunikationsprotokoller er, og hvordan de fungerer i elcyklens elektriske system. Vi gennemgår de anvendte protokoltyper, hvordan de adskiller sig fra hinanden, hvor de anvendes, deres fordele og ulemper, omkostningsovervejelser, overholdelse af sikkerhedsstandarder i EU og USA samt begrænsninger. Målet er at levere en klar, autoritativ guide til vores kunder og publikum, der balancerer teknisk dybde med praktisk forståelse.
Nøglekomponenter til elcykler - "nervesystemet"
Man kan sige, at elcykler har et centralnervesystem af ledninger og datalinks, der forbinder alle kritiske komponenter. Ligesom nerverne bærer signaler i en krop, bærer ledningsnettet både strøm- og datasignaler på tværs af cyklen. Nøglekomponenterne i en typisk elcykels elektriske system omfatter:

- Batteripakke: Jævnstrømskilden (normalt 36-48 V), der leverer energi til systemet. Den forbindes til controlleren via tykke strømkabler (med sikringer eller afbrydere af hensyn til sikkerheden) for at levere hovedstrømmen. Nogle avancerede batterier har også et datalink (via kommunikationslinjer) til at dele status- eller kontrolsignaler med controlleren.
- Motor og controller: Motoren (navmotoren i et hjul eller et midterdrev ved kranken) får strøm fra motorstyringen, som er "hjernen", der regulerer motorens output baseret på rytterens input og sensorfeedback. Controlleren er en elektronisk enhed med en mikroprocessor, der modtager signaler (gashåndtag, pedalsensor, bremser osv.) og styrer strømmen til motoren. Motorer har typisk faseledninger (tunge kabler, der fører strøm) og sensorkabler (tynde kabler fra Hall-effektsensorer, der giver feedback om rotorposition), der går til controlleren.
- Menneskelig grænseflade (gashåndtag, pedalsensor, display): Rytteren kommunikerer med elcyklen via enheder som gashåndtaget (ofte et greb på styret med en hall-effektsensor, der udsender et variabelt spændingssignal for at anmode om hastighed) og pedalassistentsensoren (PAS), der registrerer pedalbevægelser via magneter og sensorer. Displayet på styret viser hastighed, batteriniveau, hjælpeniveau osv. og har ofte knapper, så rytteren kan justere indstillingerne. Displayet og controlleren udveksler data via et flertrådskabel med strøm- og kommunikationslinjer.
- Sikkerhedsafbrydere (bremsehåndtag): E-bike-bremsehåndtag har normalt afbrydere, der sender et signal til controlleren om straks at afbryde motorkraften, når der bremses. Typisk bruges et simpelt totrådskredsløb til dette, der fungerer som et on/off-signal til controlleren.
- Belysning og tilbehør: Mange elcykler har også for- og baglygter, horn, USB-opladere osv. Disse kan styres af hovedcontrolleren eller fungere på separate kredsløb, men i avancerede systemer kan de også adresseres via kommunikationsbussen.
Hvis du vil have en detaljeret guide til tilbehør til elcykler og ladcykler, kan du Læs denne artikel for et mere omfattende svar eller måske tjekke vores Cargo Bike 101 side.
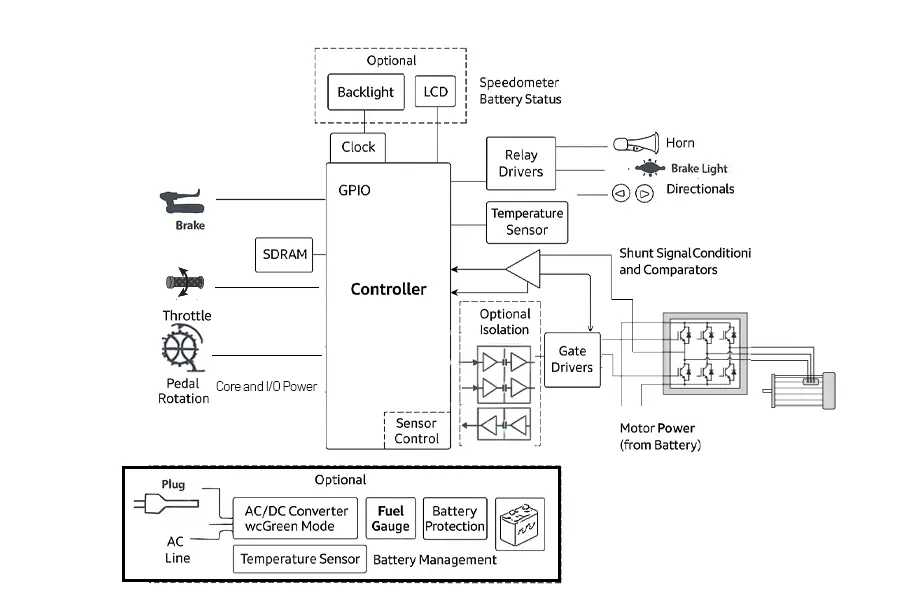
Figur 2: Blokdiagram over et typisk kontrol- og batteristyringssystem til elcykler. Den centrale styreenhed har grænseflader til vigtige input - gashåndtag, pedalsensorer, bremsegreb - og styrer output som f.eks. motordrevne signaler via gate-drivere, relæ-drivere og GPIO-forbindelser. Valgfrie moduler som LCD-skærme, batteriopladere, brændstofmålere og baggrundsbelysning udvider systemets funktionalitet. Kommunikation mellem komponenterne understøtter realtidskoordinering af motorkraft, belysning, sikkerhedsafbrydelser og overvågning af batteristatus.
Hvad er kommunikationsprotokoller for elcykler?
I forbindelse med elcykler henviser kommunikationsprotokoller til den metode og det format, hvormed elektroniske komponenter udveksler data. Tidlige eller grundlæggende elcykler havde ofte ikke et komplekst digitalt netværk - mange signaler var analoge eller simple on/off-kredsløb. For eksempel sender et gashåndtag en analog spænding for at indikere, hvor meget kraft rytteren ønsker, og en bremsekontakt åbner eller lukker blot et kredsløb for at afbryde strømmen. Men efterhånden som elcyklerne er blevet mere sofistikerede - med smarte skærme, avancerede sensorer og endda GPS- eller smartphone-integration - er der opstået et behov for mere robust digital kommunikation.
I dag dominerer to primære digitale kommunikationsprotokoller elcykelsystemer:
- UART (Universal Asynchronous Receiver-Transmitter): En seriel kommunikationsmetode, der skaber et direkte en-til-en-datalink mellem to enheder (typisk controlleren og skærmen).
- CAN-bus (Controller Area Network): En netværksprotokol, der gør det muligt for flere enheder (controller, display, batteri-BMS, sensorer osv.) at kommunikere via de samme fælles busledninger.
Ud over UART og CAN Bus bruges der af og til to andre kommunikationsprotokoller i elcykelsystemer:
- SIF (Serial Interface Format): Dette er en proprietær eller forenklet protokol, der ofte findes i visse mærkesystemer (f.eks. Shimano STEPS eller ældre displayenheder). Den bruges typisk til grundlæggende dataudveksling mellem controlleren og displayet eller fjernbetjeningsknapperne. Da SIF mangler åben standardisering og fleksibilitet, er den for det meste begrænset til bestemte mærker eller ældre modeller.
- RS-485 (anbefalet standard 485): RS-485 er en seriel kommunikationsprotokol af industriel kvalitet, der er kendt for sin pålidelighed over lange afstande og modstandsdygtighed over for støj. Selv om den ikke er så almindelig som UART eller CAN i forbrugernes elcykler, findes den i nogle avancerede eller kommercielle flådesystemerisær hvor der er behov for robusthed og længere ledninger - som ved delecykler, udlejningsflåder eller kraftige elcykler.
Disse protokoller er i bund og grund "sprogene" i elcyklens elektronik. Hvis alle komponenter taler samme sprog, flyder informationen korrekt; hvis ikke, forstår enhederne ikke hinanden. Derfor er det afgørende at matche protokollen, når man f.eks. parrer en skærm med en controller. Selv om stikket passer, betyder en inkompatibel protokol, at delene ikke fungerer sammen.
Oversigt over markedsanvendelse (2024-2025 estimerede tendenser)
Selvom der ikke er nogen universelt offentliggjort opdeling af protokolbrug på elcykelmarkedet, baseret på brancheindsigt og større systemleverandører (f.eks. Bosch, Bafang, Shimano, Mahle osv.), er følgende en rimelig estimeret fordeling fra og med 2025:
| Protokol | Brugsandel (anslået) | Almindelige anvendelser | Noter |
|---|---|---|---|
| UART | ~50-60% | Indgangs- til mellemklasse elcykler | Udbredt på grund af enkelhed og lave omkostninger |
| CAN-bus | ~30-35% | High-end, smarte eller modulære elcykler | Øget anvendelse med smart integration |
| RS-485 | ~5-10% | Flådesystemer, kommercielle opsætninger med lang ledning | Begrænset til specifikke brugssituationer |
| SIF / Ejendomsret | <5% | Brand-specifikke eller ældre systemer | Findes mest i ældre eller aflåste økosystemer |
Bemærk: Disse tal er generaliseret på tværs af globale markeder (EU, CN, NA) og er baseret på OEM-tendenser, offentlig dokumentation, teardown-data og indsigt fra komponentleverandører.
Definér kommunikationsprotokoller for elcykler på en nemmere måde :.
Enkelt sagt er kommunikationsprotokollerne i elcykler som følger sprog eller regler, der lader forskellige elektroniske dele tale sammen. Hvis komponenterne ikke taler samme sprog, kan de ikke forstå hinanden - selv om stikket fysisk passer.
📞 Analogi: En-til-en-opkald vs. gruppechat
Lad os forestille os to måder at kommunikere på i hverdagen for at forstå elcykelprotokoller:
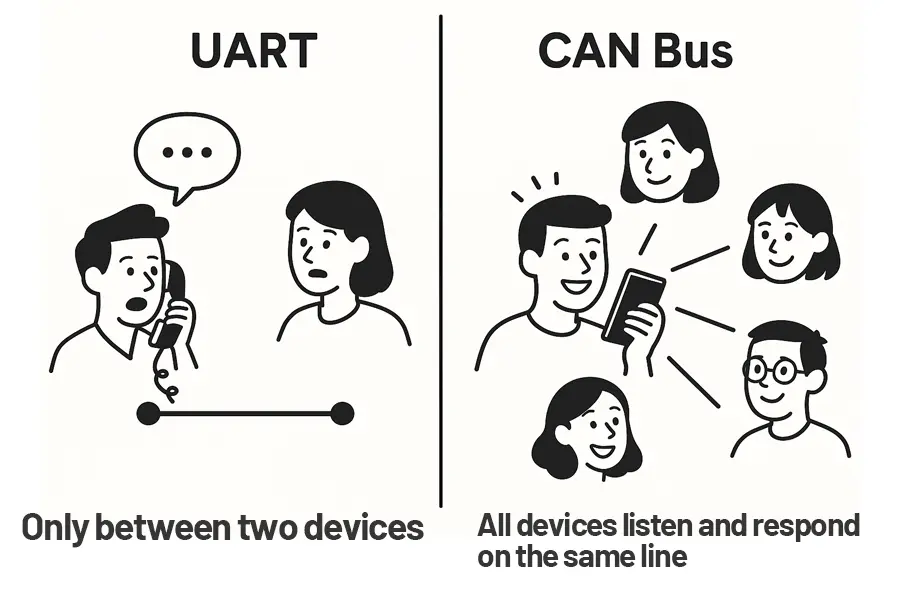
UART: Som et telefonopkald på tomandshånd
- UART (Universal Asynchronous Receiver-Transmitter) er som at ringe til en ven på telefonen.
- Kun to enheder kan tale ad gangen - som din skærm og din controller.
- Hvis du vil tale med en anden enhed, skal du bruge En anden ledning (eller et andet telefonopkald).
- Det er enkelt, men ikke skalerbart, når du har mange enheder.
- Almindelig i grundlæggende elcykelsystemer med begrænsede funktioner.
AN Bus: Som en gruppechat
- CAN Bus (Controller Area Network) er som en gruppechat på WhatsApp eller WeChat.
- Alle enheder (controller, batteri, display, sensor, lys) er i det samme chatrum.
- Hver besked er mærket med et afsender-ID, og hver enhed læser kun de beskeder, der er beregnet til den.
- Det er meget mere effektiv og ideel, når der er mange komponenter, der skal arbejde sammen.
- Brugt i Smarte, avancerede elcykelsystemerofte med GPS, Bluetooth og app-integration.
| Funktion | UART (telefonopkald) | CAN Bus (gruppechat) |
|---|---|---|
| Type af forbindelse | En-til-en (punkt-til-punkt) | En-til-mange (delt bus) |
| Skalerbarhed | Lav - har brug for ekstra ledninger til flere enheder | Høj - flere enheder deler de samme ledninger |
| Kommunikationsflow | Kun mellem to enheder | Alle enheder lytter og svarer på samme linje |
| Kompleksitet | Enkel | Mere kompleks, men kraftfuld |
| Brugsscenarie | Basis elcykler (kun display ↔ controller) | Smarte elcykler med BMS, app, sensorer osv. |
Kommunikationsprotokollernes rolle
Kommunikationsprotokoller i elcykler tjener flere vigtige formål:
- Deling af data: De gør det muligt for controlleren at sende realtidsdata til displayet (hastighed, batteriets opladningstilstand, fejlkoder) og modtage kommandoer tilbage (f.eks. ændre assistanceniveau, tænde/slukke lys). Uden en ordentlig protokol får du måske ikke en pålidelig hastighedsaflæsning eller kan ikke justere indstillingerne.
- Koordinering af komponenter: I avancerede systemer skal flere mikrocontrollere koordineres. For eksempel kan et intelligent batteri med sit eget batteristyringssystem (BMS) kommunikere med motorstyringen for at forhindre overstrøm eller for at vise en præcis batteriprocent. En CAN-bus eller et lignende netværk gør det muligt for batteriet, motorstyringen, displayet og endda sensorer at dele information i et netværk med flere knudepunkter.
- Sikkerhed og pålidelighed: En veldesignet protokol sikrer, at hvis der opstår en fejl eller et tab af signal (f.eks. hvis et kabel er beskadiget), kan systemet opdage det og træffe sikre foranstaltninger (som f.eks. at afbryde motoreffekten). Robuste protokoller som CAN omfatter fejlkontrol og meddelelsesprioritering for at håndtere dette. Enklere analoge signaler mangler en sådan fejlhåndtering - hvis en gashåndteringsledning løsner sig, kan controlleren fejlfortolke støj som et gashåndteringssignal, medmindre der er indført sikkerhedsbestemmelser.
- Mulighed for udvidelse: For elcykler med mange funktioner (GPS-trackere, tyverisikring, flere assistentsensorer osv.) gør et kommunikationsnetværk det lettere at tilføje eller fjerne enheder. I stedet for at hver ny enhed skal have en dedikeret ledningsforbindelse til controlleren, kan en enhed slutte sig til den fælles bus og dele data med alle andre. Denne skalerbarhed er en vigtig grund til, at moderne high-end elcykler bevæger sig i retning af CAN-bus.
Kort sagt er kommunikationsprotokollen rygraden i elcyklens elektriske system, som sikrer, at alle elektroniske dele fungerer sammen. I et andet indlæg vil vi dykke ned i de to vigtigste protokoltyper (UART og CAN) og undersøge, hvordan de hver især fungerer og deres respektive anvendelsesmuligheder i elcykler og elcykler til last. tjek, hvis du er interesseret:
- "Forståelse af UART i elcykler: Hvordan simpel seriel kommunikation driver din cykel"
- En begyndervenlig guide til, hvordan UART muliggør grundlæggende dataudveksling mellem elcykelkomponenter som skærme og controllere.
- "Hvad er CAN Bus i elcykler? En smartere måde at forbinde batterier, sensorer og meget mere på"
- Lær, hvordan moderne elcykler bruger CAN Bus til at understøtte kommunikation med flere enheder, avancerede displays og systemdiagnostik.
Anvendelsesscenarier: Hvilken kommunikationsprotokol til hvilken elcykel?
Det er nyttigt at forstå, hvordan UART og CAN vælges i praksis til forskellige elcykeldesigns. Vi vil se på to brede kategorier: elcykler til forbrugere (herunder typiske pendler- eller fritidscykler) og Last-/flåde-elcykler (bruges ofte til forretningsleverancer eller af udlejningsflåder)og bemærker, at disse ofte har forskellige prioriteter.

- Standard forbruger-elcykler (City, Mountain, Road elcykler): Det er de cykler, som mange køber til privat brug. De spænder fra entry-level til meget high-end. I den lavere ende (omkostningsfølsomme modeller) er UART-kommunikation ekstremt almindelig. For eksempel bruger en simpel 36V-pendlercykel med en kadencesensor og et simpelt LED-display sandsynligvis en UART (eller endda analoge signaler) mellem controlleren og det minimale display, den har. Fokus her er omkostningseffektivitet og grundlæggende funktionalitet. Mange af disse cykler bruger bredt tilgængelige controllere og skærme, der overholder en de facto UART-protokol, hvilket betyder, at cykelmærker kan købe komponenter fra forskellige OEM'er. Det er attraktivt for B2B-købere, som gerne vil have fleksibilitet til at bruge f.eks. en flottere skærm fra leverandør A med en controller fra leverandør B - så længe begge taler UART i samme format, kan det fungere (selvom man skal verificere kompatibiliteten med hensyn til pinouts og firmware). På de mere avancerede forbrugercykler, især dem, der fremstilles af store mærker, er der en tendens til CAN-bus. Højtydende e-MTB'er eller e-landevejscykler med drejningsmomentsensorer og smarte skærme bruger måske CAN for at integrere alt problemfrit. Nogle mærker bruger dog stadig UART eller andre proprietære serielle links, selv i avancerede cykler; det varierer fra producent til producent og deres designfilosofi.

- Lastcykler og kommercielle flåder: Lastcykler er designet til at transportere tung last eller passagerer og bruges ofte af virksomheder (leveringstjenester, postcykler osv.). Disse cykler har en tendens til at prioritere robusthed, sikkerhed og flådestyringskapacitet over prisen på elektronik. Det er i dette segment, at CAN-bussen virkelig har vundet indpas. For eksempel kan ladcykler have dobbelte batterier for at forlænge rækkevidden - styring af to batterier kræver kommunikation for at afbalancere afladningen eller i det mindste for at rapportere status for hvert batteri. CAN gør det lettere for en controller at kommunikere med to BMS-enheder (en i hvert batteri) på den samme bus. Lastcykler kan også have ekstra tilbehør: bremselys, blinklys, endda elektroniske låse - koordinering af disse via en central bus forenkler ledningsføring og styring. Og fordi el-lastcykler ofte bruges i flåder, vil virksomheder gerne have telematik på dem: GPS-trackere, der kan rapportere cyklens placering, brug og eventuelle fejl. Med et CAN-aktiveret system kan et telematikmodul simpelthen aflytte CAN-meddelelserne om hastighed, batteristatus osv. og uploade disse oplysninger. Faktisk viste et casestudie med en europæisk leveringsflåde, at aflytning af CAN-bussen gav mulighed for fjernovervågning af vedligeholdelsesdata (f.eks. kilometertal), fjerndeaktivering af motoren til tyverisikring og over-the-air-opdateringer af cyklens firmware - funktioner, der er yderst nyttige til flådestyring. Dette ville være besværligt at implementere på en UART-baseret cykel.
- Mix og match vs. integrerede systemer: Hvis et elcykelmærke vil have frihed til at blande komponenter eller tillade opgraderinger på eftermarkedet, har de en tendens til at holde sig til UART-baserede systemer. Vi så, at UART-systemer gør det nemt at skifte display eller justere motorindstillinger.. En mindre elcykelvirksomhed foretrækker måske denne vej for at undgå at være låst til én leverandør - de kan skifte leverandør af motor/controller uden at ændre hele økosystemet, så længe protokollen forbliver UART, og de kan tilpasse firmwaren. På den anden side, brands med fokus på systemoptimering og compliance vælger ofte CAN. For eksempel bruger Bosch-drevne elcykler en CAN-lignende bus (Bosch har en proprietær CAN-baseret protokol), der forbinder deres motor, display og batteri. Det sikrer, at ingen tredjepartsdele kan forstyrre; alt er finjusteret sammen. Fordelen er fremragende pålidelighed og sikkerhed - systemet giver en fejlmelding, hvis noget er uden for specifikationerne. Ulempen er, at du som B2B-køber (f.eks. en cykel-OEM, der vælger Bosch) forpligter dig til at købe motor, controller, batteri og display. alle fra Bosch som en pakke.
- Lastcykler - specifikke overvejelser: Lastcykler, især i EU, er ofte udsat for strengere kontrol, fordi de kan transportere tungere last eller endda passagerer. I Tyskland er der f.eks. en standard (DIN 79010) specifikt for ladcyklers sikkerhed (mest mekaniske aspekter som stelstyrke og bremsning). Selvom denne standard ikke dikterer kommunikationsprotokoller, er den Sikkerhed først-tankegang i ladcykler tilskynder til at bruge en protokol, der f.eks. kan sikre, at hvis noget går galt (overophedet motor eller lavt batteriniveau), kan systemet kommunikere det og tage affære. CAN's robusthed og fejlhåndtering hjælper med at opfylde disse sikkerhedsmål. Derudover kører elcykler ofte i bymiljøer (levering i byer), hvor der er meget radio/elektrisk støj, og hvor der er meget på spil, hvis der opstår en kommunikationsfejl på det forkerte tidspunkt. Den CAN's støjimmunitet er et stort plus her, da det forhindrer fejlkommunikation, der kan føre til uberegnelig adfærd.


Sikkerhedsstandarder og overholdelse af elektriske systemer (EU/USA)
Uanset hvilken kommunikationsprotokol der anvendes, skal elcyklens elektriske systemer overholde sikkerhedsstandarder for at sikre, at de fungerer sikkert og lovligt, især på vigtige markeder som Europa og USA. Kommunikationsprotokollen kan indirekte påvirke en cykels overholdelse - for eksempel kan en protokol, der tillader ubegrænsede brugerændringer, udgøre en risiko for overholdelse, mens en protokol, der er låst, kan hjælpe med at sikre, at cyklen holder sig inden for de lovlige grænser. Lad os se nærmere på de relevante standarder, og hvordan de hænger sammen:
Hvordan kommunikationsprotokoller påvirker elcyklers overensstemmelse i EU
Den Europæiske Union (EU) - EN 15194: I EU klassificeres de fleste elcykler (pedalassisterede cykler med motoreffekt <= 250W og assistanceafbrydelse ved 25 km/t) som EPAC'er (Elektronisk strømassisterede cykler). Standarden EN 15194 gælder for EPAC'er og definerer krav og testmetoder for sikkerhed og ydeevne. Dette omfatter mekanisk sikkerhed (bremser, stel osv.) og elektrisk sikkerhed (ledninger, EMC osv.) samt sikring af, at cyklen overholder hastigheds- og effektgrænserne.
- For kommunikationsprotokoller er et relevant aspekt elektromagnetisk kompatibilitet (EMC): Systemet bør ikke udsende for meget interferens eller blive unødigt påvirket af interferens. En veldesignet CAN- eller UART-kommunikationslinje bør bestå EMC-tests (EN 15194 henviser til EN 55014 eller lignende for EMC). Den CAN's støjresistente natur kan være en fordel i forhold til at opfylde disse EMC-krav, da det i sagens natur håndterer støj bedre, men UART-systemer kan også opfylde kravene, hvis de er ordentligt afskærmet.
- Manipulation af hastighed og strøm: EN 15194 kræver, at assistancen afbrydes ved 25 km/t, og at brugeren ikke let kan justere denne grænse over den lovlige værdi. Hvis en cykel bruger UART, og producenten lader programmeringspads være tilgængelige, kan en bruger kunne potentielt fjerne begrænsningen - det kan give anledning til problemer med overholdelse af reglerne. Nogle producenter bruger derfor låste CAN-systemer specifikt for at forhindre brugerne i at ændre hastighedsgrænsen. For eksempel har Bafangs CAN-baserede motorer en fast hastighedsgrænse, som ikke kan ændres via displayet, hvilket er med til at sikre overholdelse af reglerne fra starten. I modsætning hertil kan en kyndig bruger på mange UART-systemer gå ind i indstillingstilstand på displayet og justere hjulstørrelsen eller -grænsen eller bruge et programmeringskabel, hvilket kan være i strid med loven, hvis de får cyklen til at overskride 25 km/t i assistance.
- Elektrisk sikkerhed: EN 15194 (seneste revision) dækker grundlæggende elektrisk sikkerhed, men interessant nok dækker ikke fuldt ud batteriets sikkerhed - Det forudsætter, at selve batteripakken overholder andre standarder. Den fokuserer mere på integration, ledningsføring og grundlæggende beskyttelse (som f.eks. ingen udsatte strømførende dele osv.). En kommunikationsprotokol påvirker ikke dette direkte, men indirekte kan en protokol som CAN, der lader BMS'en tale med controlleren, forbedre sikkerheden - f.eks. kan BMS'en sende en "stop afladning"-kommando, hvis batteriet bliver overophedet. Selvom det ikke er et krav i EN 15194, hjælper den slags funktioner en cykel med at opfylde de generelle sikkerhedsforventninger (undgå termisk løbskhed).
Derudover skal europæiske ladcykler (især dem, der transporterer varer/passagerer) muligvis opfylde kravene i Maskindirektivet hvis de ikke strengt taget falder ind under cykelreglerne (det gør nogle tunge lastcykler). Dette understreger igen robuste fejlsikringer. Brug af en solid kommunikationsprotokol med fejlsikker adfærd (som CAN, der lukker ned ved fejl) kan hjælpe med at overholde reglerne her.
Mere information om EU-standard for elcykler
Hvordan kommunikationsprotokoller påvirker elcyklers overholdelse i USA
USA - UL 2849 og andre: I USA er produktionen af elcykler lidt mindre reguleret på føderalt niveau med hensyn til ydeevne (der er en forbrugerproduktdefinition af en elcykel med lav hastighed som maks. 750 W og 20 km/t med gashåndtag/28 km/t med pedalassistance, men der er ingen obligatoriske konstruktionsstandarder på føderalt niveau). Men det er ikke tilfældet, Sikkerhedscertificering bliver afgørendeisær på grund af bekymringer om brand fra batterier.
- UL 2849 er den førende sikkerhedsstandard for elcyklers elektriske systemer i Nordamerika. Den dækker hele det elektriske drivsystem på en elcykel - inklusive batteriet, motoren, opladeren og alle sammenkoblinger. UL 2849-testen ser på ting som, om ledningerne kan håndtere strømmen, om systemet er beskyttet mod kortslutninger, og vigtigst af alt omfatter den også UL 2271 til batterier (som er en batterispecifik sikkerhedsstandard). Med hensyn til kommunikation foreskriver UL 2849 ikke en protokol, men den vil f.eks. kontrollere, at systemet fejler sikkert, hvis kommunikationen går tabt, eller der opdages en fejl (ingen termiske hændelser, ingen løbsk motor). Et CAN-baseret system har måske en lille fordel, når det gælder redundans (hvis f.eks. gashåndteringsmeddelelsen går tabt, kan CAN registrere det og lave en passende timeout). Men selv UART-systemer kan designes til at opfylde UL 2849 (de har bare brug for grundig fejlhåndtering i controllerens firmware).
- Forebyggelse af brand og elektrisk stød: Standarder som UL 2849 fokuserer på at forhindre elektriske brande og stød. Hvis en elcykel f.eks. har en oplader tilsluttet, bør kommunikationen mellem batteri og oplader (hvis der er nogen) ikke føre til overopladning. Det er især EnergyBus-standard vi nævnte, som er CAN-baseret, var delvist motiveret af sikkerhed - at sikre, at enhver oplader sikkert kan oplade ethvert batteri ved at kommunikere via CANopen og kun aktivere strøm, når korrekt handshaking er udført . EnergyBus bruger et specifikt stik, der inkluderer CAN-datalinjer, så en oplader og et batteri først etablerer kommunikation og derefter tillader ladestrøm for at undgå gnister eller uoverensstemmende spændinger. Dette koncept stemmer godt overens med UL's sikkerhedslogik. Hvis et mærke bruger EnergyBus, hjælper det sandsynligvis med at bestå sikkerhedscertificeringer, fordi det i sagens natur håndterer sikre interaktioner mellem komponenter.
- Overholdelse af regler (hastighed/effekt): I USA er klassesystemet (klasse 1, 2, 3 elcykler) stort set et æressystem og håndhæves ikke så strengt som EU's grænser, men af ansvarsmæssige årsager sikrer producenterne typisk, at en elcykel, der sælges som klasse 2, ikke let kan ændres til f.eks. at overskride 20 mph på gashåndtaget. Også her kan det hjælpe at bruge en lukket CAN-protokol - brugerne kan ikke bare sætte et kabel i og fjerne begrænsningerne på cyklen. Det er bemærkelsesværdigt, at mange elcykelfirmaer nu reklamerer med UL-certificerede batterier eller systemer for at forsikre kunderne om sikkerheden. For eksempel understreger HOVSCO (som det ses i deres vidensbase), at deres cykler opfylder UL 2849 for elektrisk sikkerhed og EN 15194 for generel sikkerhedsoverensstemmelse. Det betyder, at deres ledninger, stik og kommunikation alle skal fungere uden at forårsage farer.
Internationale og andre standarder: Ud over EN 15194 og UL 2849 findes der andre relevante standarder - f.eks, ISO 4210 (cykelsikkerhedsstandard) med en del, der dækker krav til elcykler, og den tyske DIN 79010 for ladcykler (som vi bemærkede, dækker ting som stelstyrke under last og bremseevne). De dikterer ikke direkte elektronikken, men en standard for ladcykler kan implicit kræve, at f.eks. assistancen ikke svigter under tung belastning. En robust kommunikation sikrer, at signalerne mellem batteri, controller og sensorer forbliver pålidelige, selv om cyklen er belastet (og måske er der mere elektrisk støj, eller batteriet er ved at være tomt).
Kort sagt, Overholdelse og sikkerhed driver nogle designbeslutninger mellem UART og CAN. En producent, der sigter efter maksimal sikkerhed, læner sig måske op ad CAN på grund af fejltjek og kontrol eller implementerer ekstra sikkerhedsforanstaltninger på UART-systemer. Begge protokoller kan være en del af et sikkert design, men det er afgørende, hvordan de bruges. Den CAN-systemers lukkede natur kan håndhæve overholdelse (f.eks. hastighedsgrænser, der ikke kan justeres af brugerne, som loven kræver) , mens UART-systemer giver mere brugerfrihed, hvilket er et tveægget sværd. Producenterne skal sikre, at selv UART-baserede cykler har ting som en fysisk eller softwarebegrænser, der ikke let kan hackes, for at holde sig inden for de lovlige grænser.
Endelig er det uanset protokol vigtigt at bruge Kvalitetsstik og ledninger er en del af overensstemmelsen. I EU skal cyklen kunne tåle vibrationer, uden at ledningerne løsner sig, og under våde forhold uden at kortslutte. Stik som Higo/Julet (vandtætte stik, der er meget udbredt i elcykler) er populære, ikke kun for nemheds skyld, men også fordi de hjælper med at opfylde IP-klassificering og krav til pålidelighed. En CAN-bus vil typisk bruge sådanne stik (f.eks. kan en enkelt Higo 4- eller 5-polet bære CAN-data og strøm til et display). Valget af protokol ændrer ikke på behovet for god Trækaflastning, isolering og låsestik for at forhindre afbrydelser (hvilket kan være farligt, hvis f.eks. dit bremseafbrydelsessignal ikke når frem til controlleren, fordi et kabel har revet sig løs).
Som afslutning på dette afsnit vil jeg sige, at både Europa og USA har stort fokus på elcyklers sikkerhed nu. Overholdelse af standarder som EN 15194 og UL 2849 er i stigende grad ikke til forhandling for velrenommerede mærker. Kommunikationsprotokollen er en brik i puslespillet - et middel til at sikre, at det elektriske system er koordineret og fejlsikkert. CAN-bussens pålidelighed kan hjælpe med at opfylde disse standarder ved at give robust kommunikation, mens UART-systemer kræver omhyggeligt design for at være lige så sikre. Producenter vil ofte vælge den protokol, der passer bedst til compliance-strategien: UART til enklere design, hvor risikoen nemt kan håndteres, eller CAN til komplekse systemer, hvor sikkerhedsfunktionerne kommer til deres ret.
Omkostninger og markedsovervejelser når du vælger kommunikationsprotokoller
Når man skal vælge mellem kommunikationsprotokoller (eller generelt designe en elcykels elektriske system), er omkostningerne en vigtig faktor - ikke kun de økonomiske omkostninger, men også "omkostningerne" i form af fleksibilitet og leverandørforhold. Her kan du se, hvordan omkostningerne sammenlignes, og hvad B2B-indkøbere eller ingeniører overvejer:
- Omkostninger til hardware: Som tidligere nævnt bruger et UART-baseret system typisk enklere hardware. Controlleren og displayet skal bare have UART-kapacitet, som stort set alle mikrocontrollere har indbygget. Ledningsføringen kan være en smule enklere (færre termineringsovervejelser osv.). Et CAN-baseret system kræver lidt mere: en CAN-transceiverchip til hver enhed og muligvis en kraftigere MCU (selv om selv ret billige MCU'er i dag har CAN indbygget). Den faktiske forskel i BOM (Bill of Materials) kan være i størrelsesordenen et par dollars pr. cykel i store mængder, men på et konkurrencepræget marked betyder det stadig noget. For en stor cykelflådeordre bliver disse dollars mangedoblet. Når det er sagt, er Prisen på CAN-hardware er faldet betydeligt, og kompromiset kan nemt retfærdiggøres af den ekstra funktionalitet, som CAN giver.
- Udviklings- og integrationsomkostninger: For en nystartet elcykel eller en lille virksomhed kan det være dyrt at udvikle et CAN-baseret system fra bunden, hvis de ikke har intern ekspertise. Det kan indebære at ansætte ingeniører inden for indlejrede systemer, der kender CAN, investere i værktøjer og bruge tid på at udvikle brugerdefineret firmware. Hvis de alternativt køber et færdigt system (som Bosch- eller Shimano-drivenheder, der er CAN-baserede), er udviklingsomkostningerne på deres side lavere, men enhedsomkostningerne er højere (Bosch-systemer er dyrere, delvis fordi du får en fuldt integreret løsning og brandnavnet). A UART-systemet kan ofte sættes sammen af hyldevare-komponenter med kendt kompatibilitet - for eksempel bruger mange virksomheder open source- eller standardprotokoller, hvor en stor del af teknikken allerede er udført, og risikoen er lavere. For en B2B-køber (f.eks. en virksomhed, der vil have en masse elcykler under sit eget mærke) kan UART betyde, at de kan købe billigere generiske dele, mens CAN ofte betyder, at de skal tilpasse sig en bestemt leverandørs økosystem (som måske opkræver licenser eller højere priser).
- Omkostninger til eftersalg og vedligeholdelse: Det bliver nogle gange overset. En flådeoperatør (som en delecykel eller et leveringsfirma) kan opleve, at CAN-buscykler sparer penge på vedligeholdelse. Hvorfor det? Fordi de kan diagnosticere problemer på afstand eller hurtigere. Et CAN-forbundet system kan rapportere fejlkoder i detaljer (f.eks. "batteri #2 temperatursensorfejl" som en specifik kode). Teknikere kan tilslutte diagnoseværktøjer til CAN-bussen for at lokalisere problemer. Det kan reducere arbejdstiden. Som det ses i IoT Venture-sagen, er ting som fjernopdatering af firmware også muligt, hvilket kan spare omkostningerne ved fysisk at tilbagekalde cykler til bestemte reparationer. På den anden side kan den første vedligeholdelse af en UART-cykel være enklere (måske er der færre ting, der går galt i kommunikationen), men hvis der er noget galt, skal du måske prøve dig frem med udskiftning af dele, da systemet ikke kan fortælle dig præcis, hvad der er galt, ud over måske at blinke med en LED. For den enkelte forbruger kan en UART-cykel være billigere at reparere, fordi de kan bruge standarddele og viden fra lokalsamfundet til at reparere den, mens en CAN-cykel kan tvinge dem til at gå til autoriseret service (som potentielt er dyrere). Så der er en afvejning af omkostninger mellem brugervenlighed (UART vinder) og avanceret diagnostisk støtte (CAN vinder, hvilket kan sænke omkostningerne til professionel service).
- Licens- og ejerskabsomkostninger: Brug af en proprietær CAN-protokol kan indebære licensafgifter eller begrænsninger. Hvis et cykelmærke udvikler deres egen CAN-protokol, er det fint, men hvis de bruger noget som CANopen eller EnergyBus, skal de måske overholde standarder og muligvis tilslutte sig foreninger (f.eks. EnergyBus e.V.). Disse omkostninger er generelt små, men de er værd at bemærke. Proprietære systemer som Bosch betyder i praksis, at cykelproducenten køber drivenhederne som en pakke; Bosch fastsætter prisen. Med UART-systemer er der ofte mere konkurrence mellem leverandørerne af dele, hvilket kan presse priserne ned.
- Kundeopfattelse og værdi: Fra et markedsføringsperspektiv kan et mærke måske retfærdiggøre en højere pris for en cykel, der har "CAN-bus-elektronik af bilkvalitet", da det lyder avanceret og pålideligt (selv om kunden ikke direkte kan se forskellen). Der er værdi i Førsteklasses følelse og ydeevne som CAN-systemer ofte kommer med (de er normalt på cykler, der også har motorer af høj kvalitet osv.) Så mærker, der henvender sig til det avancerede marked eller kommercielle kunder, kan udnytte CAN som en del af et førsteklasses tilbud. Omvendt er kunderne på begynder-elcykler mest interesserede i, at det fungerer og er til at betale - de vil ikke betale ekstra, bare fordi cyklens display bruger CAN i stedet for UART. Så det er det, Valget af protokol skal stemme overens med cyklens markedssegment.
- Fremtidssikring: En omkostning, som ingeniører overvejer, er Alternativomkostninger ved ikke at være fremtidssikret. Hvis du investerer i en UART-baseret platform nu, men næste år vil tilføje flere funktioner (f.eks. et ekstra batteri eller en ny sensortype), vil du måske finde den gamle platform begrænsende og blive tvunget til at redesigne den. Nogle virksomheder beslutter, at det er mere omkostningseffektivt i det lange løb at vælge CAN fra starten, selv om det ikke udnyttes fuldt ud, så der er plads til nye funktioner og tilbehør. Det kan spare omkostninger til ombygning senere hen. Det er en strategisk beslutning: at betale lidt mere på forhånd i forhold til potentielt meget mere senere for at opgradere.
Med hensyn til de faktiske priser: Det er svært at fastslå, men en insider i branchen kan f.eks. sige, at et grundlæggende UART e-cykel controller + display-sæt kan koste f.eks. $50-$100 i løs vægt, mens et tilsvarende CAN-baseret sæt fra et stort mærke kan koste et par hundrede dollars (fordi det er mere sofistikeret). Men den forskel omfatter ofte også bedre motorydelse, garanti osv. og ikke kun kommunikationsforskellen. De Inkrementelle omkostninger udelukkende for protokol (f.eks. ved at tilføje en CAN-chip) er lille, men den Økosystemomkostninger (kobling til et dyrt system vs. et billigt generisk system) kan være stor.
For at sige det lige ud for en B2B-køber af elcykler:
- Hvis din prioritet er laveste enhedsomkostninger og du vil have fleksibilitet til at købe ind fra flere leverandører, kan en UART-baseret åbent system er attraktiv. Du kan shoppe rundt efter skærme og controllere, der passer sammen, og måske endda forhandle med flere fabrikker.
- Hvis din prioritet er ydeevne, pålidelighed og et nøglefærdigt system (og du er villig til at betale for det), en CAN-baseret system fra en velrenommeret leverandør kan spare dig for hovedpine og tilføje værdi til dit produkt (til en højere pris, som du forhåbentlig tjener ind igen ved at prissætte dine cykler højere eller ved at effektivisere mængden).
Begrænsninger og fremtidige tendenser
Selv om vi lovpriser UART og CAN, er det værd at bemærke, at Begrænsninger i den nuværende tilstand af elcykelkommunikation og hvor tingene måske er på vej hen:
- Mangel på standardisering i hele branchen: I modsætning til bilverdenen, hvor næsten alle biler bruger CAN-bus og standardiseret diagnostik (OBD-II), er elcykelbranchen stadig fragmenteret. Der er ingen enkelt universel protokol som alle elcykler bruger. UART-implementeringer varierer (hver producent kan have forskellige dataformater over UART), og CAN-implementeringer er ofte proprietære. Dette er en begrænsning for forbrugere og cykelmontører - det er ikke "plug and play" mellem forskellige mærker. Du kan ikke tage en tilfældig skærm og forvente, at den fungerer med en tilfældig controller, medmindre de udtrykkeligt bruger den samme protokol og firmware. EnergiBus er et lovende forsøg på at standardisere (med CANopen CiA-454, der definerer beskeder til elcykelkomponenter) , men det er endnu ikke udbredt. Hvis EnergyBus eller lignende standarder vinder indpas, vil vi måske se ægte interoperable komponenter - f.eks. kan et batteri fra producent X bruges sammen med et motorsystem fra producent Y, hvor den CANopen-baserede protokol sikrer, at de forstår hinanden. Det ville gavne B2B-købere (flere leverandørmuligheder) og forbrugere (flere opgraderings-/reparationsmuligheder). Men industriens aktører har også forretningsmæssige motiver til at opretholde proprietære systemer (for at holde på kunderne). Spændingen mellem standardisering vs. proprietær kontrol vil forme fremtiden for elcykelprotokoller.
- Båndbredde og databehov: I øjeblikket er kommunikationen på elcykler relativt lav. Men fremtidige elcykler kan streame mere information - forestil dig at indsamle højfrekvente data fra drejningsmomentsensorer eller effektmålinger i høj opløsning til træningsformål eller endda video fra kameraer af hensyn til sikkerheden. CAN ved klassiske hastigheder kan blive en flaskehals, hvis der skal sendes mange data. Bilindustrien har CAN-FD (en udvidet version af CAN med større datarammer og højere gennemstrømning) og andre protokoller som Ethernet til behov for høj båndbredde. Til elcykler kunne CAN-FD eventuelt dukke op, hvis der er behov for det, eller BLE/Wi-Fi til aflæsning af datalogger. Trådløs kommunikation kan også supplere kablede protokoller: Mange elcykler bruger allerede Bluetooth Low Energy til at forbinde cyklen med en smartphone-app. Det ligger uden for rammerne af det interne elektriske system, men er værd at bemærke som en parallel kanal. I fremtiden vil nogle enklere elcykler måske endda give afkald på et kablet display og bruge et trådløst modul til en telefon - selvom kritisk kontrol (som gas- eller bremsesignaler) sandsynligvis vil forblive kablet af hensyn til pålideligheden. I fragtflåder vil vi måske se mere integration af V2X-kommunikation (vehicle-to-everything) - elcykler, der taler med logistiksystemer eller trafikinfrastruktur, som igen vil blive lagt oven på det centrale CAN-bussystem.
- Bekymringer om sikkerhed: Efterhånden som elcyklerne bliver forbundet og bruger mere kompleks kommunikation, cybersikkerhed bliver et problem. Et UART-system uden eksterne tilslutningsmuligheder er praktisk talt immunt over for hacking (nogen ville være nødt til fysisk at tappe ledningerne). Men en CAN-bus, der er forbundet med et Bluetooth-modul eller et GSM-modul (til flådesporing), introducerer potentielle sårbarheder. Producenterne bliver nødt til at sikre, at deres protokoller (især trådløse grænseflader til bussen) er sikre for at forhindre ondsindet kontrol (forestil dig et IoT-hack, der kunne deaktivere en flåde af budcykler på afstand - et langt ude, men teoretisk muligt scenarie, hvis det ikke er sikret). Proprietære protokoller er i sagens natur noget sikre gennem uklarhed, men efterhånden som CAN bliver almindeligt kendt i elcykler, kan dårlige aktører forsøge at indsprøjte CAN-meddelelser via en udsat port. Derfor vil vi måske se mere kryptering eller autentificering i elcykelkommunikationen i fremtiden.
- Brugeroplevelse: Uanset hvilken protokol der bruges, skal den i sidste ende give en god brugeroplevelse. Ryttere går op i ting som jævn strømforsyning, nøjagtige oplysninger på displayet og sikkerhedsfunktioner, der fungerer, når der er brug for det. En begrænsning i de tidlige CAN-baserede systemer var, at de nogle gange var også låst - brugerne følte sig frustrerede over, at de ikke engang kunne ændre simple præferencer. Efterhånden som systemerne modnes, kan producenterne finde måder at give brugerne fleksibilitet på (via autoriserede apps eller indstillinger) uden at gå på kompromis med kontrollen. For eksempel kan en app måske tillade begrænset tuning (inden for sikre grænser), selv på et CAN-system, eller tillade tredjepartstilbehør, der er certificeret til at kommunikere på bussen (måske ved hjælp af EnergyBus-standardmeddelelser). Vi kan forvente lidt mere åbenhed, efterhånden som protokollerne standardiseres, ironisk nok selv i en CAN-verden.
Afslutningsvis vil jeg sige Elcyklers elektriske kommunikationssystem - uanset om det er UART eller CAN - er afgørende for cyklens ydeevne, sikkerhed og modularitet.. Ingeniører, der designer elcykler, skal afveje UART's enkelhed mod CAN's sofistikerethed. B2B-købere skal overveje, hvordan valget påvirker omkostningerne, forsyningskæden og deres produkts værditilbud. Branchen ser ud til at bevæge sig i retning af CAN-bus, efterhånden som elcyklerne udvikler sig til mere forbundne og kompetente maskiner, men UART-baserede systemer vil sandsynligvis forblive parallelle til enklere, billigere modeller i nogen tid (de er trods alt "gode nok" til et stort segment af cyklister).
Ved at forstå disse kommunikationsprotokoller - i bund og grund elektrisk sprog af elcykler - får man en meget dybere forståelse for, hvordan en elcykel fungerer internt. Fra drejningen af gashåndtaget eller trykket på pedalerne til motorens kraftoverskud og tallene på displayet - det hele aktiveres af bits og bytes, der suser langs ledninger og sikrer, at batteri, motor og rytter er synkroniseret. Og uanset om det er en elegant elcykel til byen eller en tung lastvogn, er det den harmoni, der får turen til at føles ubesværet og sikker. I sidste ende er målet med enhver protokol at få teknologien til at træde i baggrunden, så rytterne bare kan nyde turen - men nu forhåbentlig med en smule indsigt i den imponerende elektroniske koordinering, der foregår under deres fødder.
Kilder:
- Guide til Qiolor-elcykler "Sådan vælger du en kompatibel skærm til din elcykel-controller" (2025) - diskuterer UART vs CANBUS-sprog og vigtigheden af at matche protokoller.
- Velco.tech - "CAN vs UART: forskelle mellem kommunikationsformer" (2024) - forklarer UART's enkelhed i forhold til CAN's netværksfunktioner og opregner deres fordele/begrænsninger.
- Biktrix' hjælpecenter "Hvad er CANBUS- og UART-protokollerne?" - brugercentreret syn på, hvordan CAN låser indstillinger (fast hastighedsgrænse) vs UART tillader ændringer, plus en sammenligning af skærmens udskiftelighed.
- IoT Venture (casestudie med CYCLE-flåde) - beskriver fordelene ved CAN-integration i elcykelflåder: adgang til vedligeholdelsesdata, fjernaktivering af motor, OTA-opdateringer .
- Viden om HOVSCO "Hvilke sikkerhedsfunktioner har elcykler?" - noter om EN 15194 (EU), der sikrer hastigheds- og effektgrænser og holdbarhed, og UL 2849 (USA), der fokuserer på el- og brandsikkerhed, samt omtale af DIN 79010 for ladcyklers sikkerhed.
- Texas Instruments app-note "Overvejelser om hardwaredesign til en elektrisk cykel med BLDC-motor" - gav typiske blokdiagrammer for elcykelsystemer og indsigt i kontrolelektronik.
- Letrigo viden om elcykler "Ledninger til elcykel-display forklaret" - detaljer om ledningsføring, stik (Higo/Julet) og advarer om, at der ikke findes nogen universel ledningsføringsstandard, og understreger korrekt tilpasning af forbindelser og robust ledningsføring for signalintegritet .
- EnergyBus Standard - Introduktion fra Kvaser - beskriver EnergyBus som en åben CANopen-baseret standard for LEV-komponenter for at sikre kompatibilitet og sikkerhed på tværs af producenter.




