
Az elektromos kerékpárok (e-kerékpárok), beleértve a teherszállító e-kerékpárokat is, egy bonyolult elektromos rendszerre támaszkodnak, amely összekapcsolja az akkumulátort, a motort, a vezérlőt, az érzékelőket és a felhasználói felületet. A rendszer kommunikációs protokolljai szolgálnak "nyelvként", amely lehetővé teszi, hogy ezek az összetevők zökkenőmentesen összehangolódjanak. Ebben a népszerű tudományos áttekintésben elmagyarázzuk, hogy mik ezek a kommunikációs protokollok, és hogyan működnek az e-kerékpár elektromos rendszerében. Kitérünk az alkalmazott protokollok típusaira, a különbségek, az egyes protokollok alkalmazási területei, előnyeik és hátrányaik, a költségekkel kapcsolatos megfontolások, az EU és az USA biztonsági szabványainak való megfelelés, valamint a korlátozások. Célunk, hogy egyértelmű, hiteles útmutatót nyújtsunk ügyfeleink és közönségünk számára , egyensúlyt teremtve a technikai mélység és a gyakorlati megértés között.
E-Bike kulcskomponensek - Az "idegrendszer"
Az e-kerékpárokat úgy lehet elképzelni, mintha egy központi idegrendszerrel rendelkeznének, amely az összes kritikus alkatrészt összekapcsolja. Ahogyan az idegek jeleket szállítanak a testben, a kábelköteg a teljesítmény- és adatjeleket is továbbítja a kerékpáron keresztül. A tipikus e-kerékpár elektromos rendszerének kulcsfontosságú elemei a következők:

- Akkumulátor: Az egyenáramú áramforrás (általában 36-48 V), amely energiát szolgáltat a rendszer számára. Vastag tápkábeleken keresztül csatlakozik a vezérlőhöz (a biztonság érdekében biztosítékokkal vagy megszakítókkal), hogy a főáramot szolgáltassa. Egyes fejlett akkumulátorok adatkapcsolattal is rendelkeznek (kommunikációs vonalakon keresztül), hogy az állapot- vagy vezérlőjeleket megosszák a vezérlővel.
- Motor és vezérlő: A motor (kerékagymotor a kerékben vagy középhajtás a hajtókarban) a motorvezérlőtől kap energiát, amely az "agy", amely a motor kimenetét a motoros bemenetei és az érzékelő visszajelzései alapján szabályozza. A vezérlő egy mikroprocesszorral ellátott elektronikus egység, amely jeleket fogad (gázpedál, pedálérzékelő, fék stb.), és a motor teljesítményét kezeli. A motorok jellemzően fázisvezetékekkel (nehéz kábelek, amelyek a teljesítményt szállítják) és érzékelővezetékekkel (vékony kábelek a Hall-effektusú érzékelőkből, amelyek a rotor helyzetének visszajelzését biztosítják) mennek a vezérlőhöz.
- Emberi interfész (gázpedál, pedálérzékelő, kijelző): A kerékpáros olyan eszközökön keresztül kommunikál az e-kerékpárral, mint a gázpedál (gyakran egy kormánymarkolat Hall-érzékelővel, amely változó feszültségű jelet ad ki a sebesség kérésére) , és a pedálsegéd érzékelő (PAS), amely mágnesek és érzékelők segítségével érzékeli a pedálmozgást. A kormányon lévő kijelzőegység mutatja a sebességet, az akkumulátor töltöttségi szintjét, a segédszintet stb., és gyakran tartalmaz gombokat a kerékpáros számára a beállítások módosítására. A kijelző és a vezérlő többvezetékes kábelen keresztül cserél adatokat, beleértve a táp- és kommunikációs vonalakat is.
- Biztonsági elzárások (fékkarok): Az e-kerékpár fékkarok általában olyan kikapcsolókkal rendelkeznek, amelyek jelet küldenek a vezérlőnek, hogy fékezéskor azonnal lekapcsolják a motor teljesítményét. Általában egy egyszerű kétvezetékes áramkört használnak erre, amely be-/kikapcsoló jelként működik a vezérlő felé.
- Világítás és kiegészítők: Sok e-kerékpárba elülső/hátsó világítás, kürt, USB-töltő stb. is beépíthető. Ezeket a fő vezérlő vezérelheti, vagy külön áramkörökben működhetnek, de a csúcskategóriás rendszerekben a kommunikációs buszon keresztül is lehet őket kezelni.
Az e-kerékpárok és teherbiciklik tartozékairól szóló részletes útmutatót a következőkben találja meg olvassa el ezt a cikket egy átfogóbb válaszért , vagy esetleg nézze meg a Cargo Bike 101 oldal.
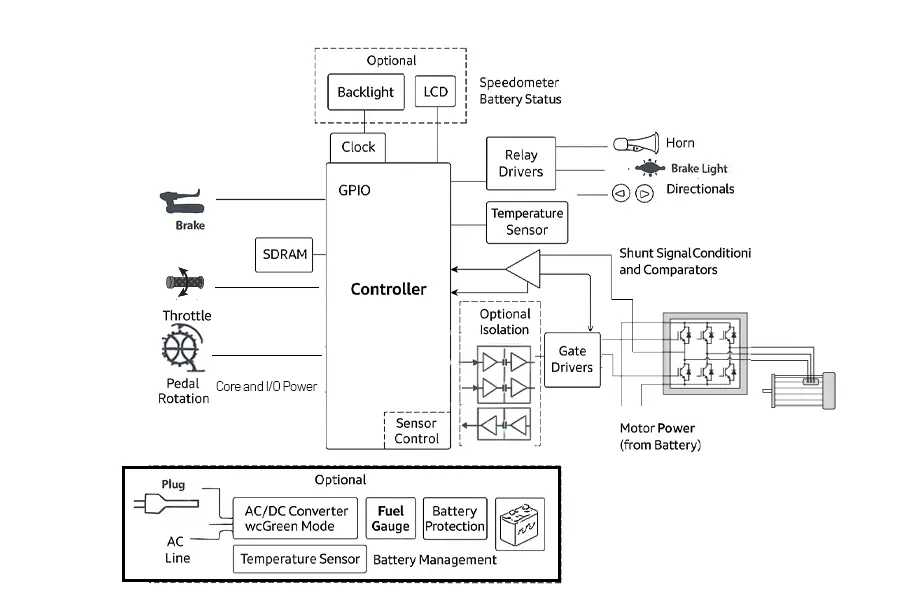
2. ábra: Egy tipikus elektromos kerékpár vezérlő- és akkumulátor-kezelő rendszer blokkdiagramja. A központi vezérlő a legfontosabb bemenetekhez - gázpedál, pedálérzékelők, fékkarok - csatlakozik, és a kimeneteket, például a motor meghajtójeleit kapu meghajtókon, relé meghajtókon és GPIO-kapcsolatokon keresztül kezeli. Az opcionális modulok, mint például az LCD kijelzők, az akkumulátortöltők, az üzemanyag-mérők és a háttérvilágítás, bővítik a rendszer funkcionalitását. A komponensek közötti kommunikáció támogatja a motorteljesítmény, a világítás, a biztonsági lekapcsolások és az akkumulátor állapotának valós idejű koordinációját.
Mik az e-kerékpár kommunikációs protokollok?
Az e-kerékpárokkal összefüggésben a kommunikációs protokollok azt a módszert és formátumot jelentik, amellyel az elektronikus alkatrészek adatokat cserélnek. A korai vagy alapszintű e-kerékpárok gyakran nem rendelkeztek összetett digitális hálózattal - sok jel analóg vagy egyszerű be/ki áramkörökből állt. Például a gázpedál analóg feszültséget küld, hogy jelezze, mekkora teljesítményt akar a motoros, a fékkapcsoló pedig egyszerűen kinyit vagy bezár egy áramkört, hogy levágja a teljesítményt . Ahogy azonban az e-kerékpárok egyre kifinomultabbá váltak - intelligens kijelzőkkel, fejlett érzékelőkkel, sőt GPS- vagy okostelefon-integrációval -, felmerült az igény a robusztusabb digitális kommunikációra.
Napjainkban két elsődleges digitális kommunikációs protokoll dominál az e-kerékpár rendszerekben:
- UART (univerzális aszinkron vevő-továbbító): Egy soros kommunikációs módszer, amely közvetlen egy az egyhez adatkapcsolatot hoz létre két eszköz (jellemzően a vezérlő és a kijelző) között.
- CAN busz (Controller Area Network): Hálózati protokoll, amely lehetővé teszi, hogy több eszköz (vezérlő, kijelző, akkumulátor BMS, érzékelők stb.) ugyanazon a közös buszvezetéken keresztül kommunikáljon.
Az UART és a CAN busz mellett két másik kommunikációs protokollt is használnak alkalmanként az e-kerékpár rendszerekben:
- SIF (Serial Interface Format): Ez egy szabadalmaztatott vagy egyszerűsített protokoll, amely általában bizonyos márkájú rendszerekben (pl. Shimano STEPS vagy régebbi kijelzőegységek) található. Általában a vezérlő és a kijelző vagy a távvezérlő gombok közötti alapvető adatcserére használják. Mivel a SIF-nek nincs nyílt szabványosítása és rugalmassága, többnyire csak bizonyos márkákra vagy régebbi modellekre korlátozódik.
- RS-485 (ajánlott 485-ös szabvány): Az RS-485 egy ipari minőségű soros kommunikációs protokoll, amely hosszú távú megbízhatóságáról és zajállóságáról ismert. Bár a fogyasztói e-kerékpárokban nem olyan gyakori, mint az UART vagy a CAN, mégis megjelenik a következő készülékekben néhány csúcskategóriás vagy kereskedelmi flottarendszer, különösen ott, ahol robosztusságra és hosszabb vezetékezésre van szükség - mint például a megosztott kerékpárok, bérelhető kerékpárflották vagy nagy teherbírású e-kerékpárok.
Ezek a protokollok lényegében az e-bike elektronikájának "nyelvei". Ha minden alkatrész ugyanazt a nyelvet beszéli, akkor az információk megfelelően áramlanak; ha nem, akkor az eszközök nem értik meg egymást. Ezért kritikus fontosságú a protokollok összehangolása, amikor például egy kijelzőt párosítunk egy vezérlővel. Még ha a dugó illeszkedik is, a protokoll összeférhetetlensége azt jelenti, hogy az alkatrészek nem fognak együtt működni.
A piaci felhasználás áttekintése (2024-2025 becsült trendek)
Bár az e-kerékpárok piacán nincs általánosan közzétett protokollhasználati bontás, az iparági meglátások és a főbb rendszergyártók (pl. Bosch, Bafang, Shimano, Mahle stb.) alapján a következők a következők. ésszerű becsült eloszlás 2025-től:
| Jegyzőkönyv | Felhasználási arány (becsült) | Gyakori alkalmazások | Megjegyzések |
|---|---|---|---|
| UART | ~50-60% | Belépő szintű és középkategóriás e-kerékpárok | Széles körben használják az egyszerűség és az alacsony költség miatt. |
| CAN busz | ~30-35% | High-end, intelligens vagy moduláris e-kerékpárok | Az elfogadás növelése intelligens integrációval |
| RS-485 | ~5-10% | Flottarendszerek, hosszú vezetékes kereskedelmi berendezések | Bizonyos felhasználási esetekre korlátozódik |
| SIF / Saját tulajdonú | <5% | Márkaspecifikus vagy örökölt rendszerek | Leginkább régebbi vagy zárt ökoszisztémákban található. |
Megjegyzés: Ezek a számadatok a globális piacokra (EU, CN, NA) általánosítva vannak, és az OEM-trendeken, nyilvános dokumentáción, szétszerelési adatokon és alkatrész-beszállítók meglátásain alapulnak.
Az e-kerékpár kommunikációs protokollok egyszerűbb meghatározása :
Egyszerűbben fogalmazva, az e-kerékpárok kommunikációs protokolljai a következők nyelvek vagy szabályok, amelyek lehetővé teszik, hogy a különböző elektronikus alkatrészek kommunikáljanak egymással.. Ha az alkatrészek nem ugyanazt a nyelvet beszélik, nem értik meg egymást - még akkor sem, ha a dugó fizikailag illeszkedik.
📞 Analógia: Egyszemközti hívás vs. csoportos csevegés
Képzeljünk el két kommunikációs módot a mindennapi életben, hogy megértsük az e-bike protokollokat:
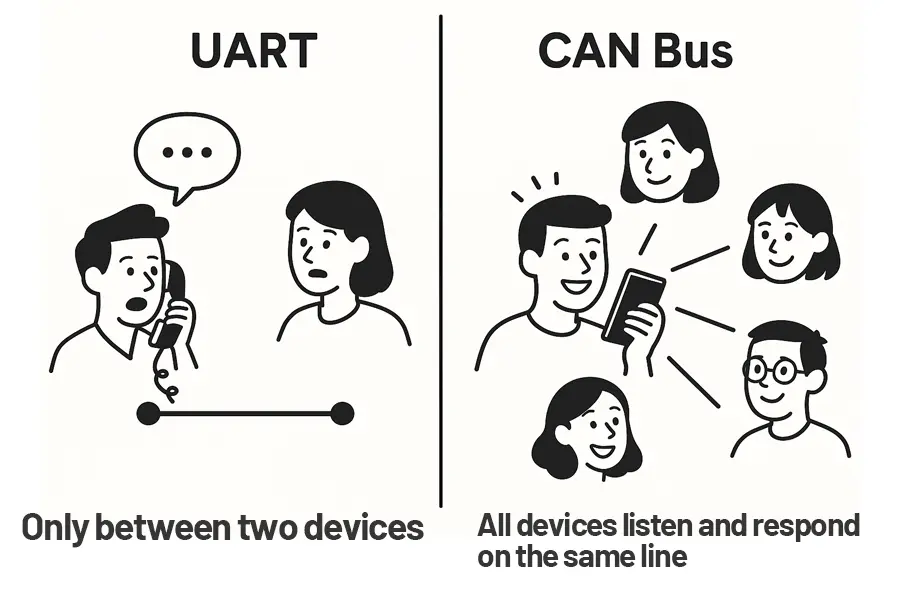
UART: mint egy telefonbeszélgetés
- Az UART (Universal Asynchronous Receiver-Transmitter) olyan, mintha egy barátot hívnánk telefonon.
- Csak két eszköz egyszerre tud beszélni - mint a kijelző és a vezérlő.
- Ha egy másik eszközzel szeretne beszélni, akkor a következőkre van szüksége egy másik vezeték (vagy egy másik telefonhívás).
- Ez egyszerű, de nem skálázható, ha sok eszközöd van.
- Gyakori a alapvető e-bike rendszerek korlátozott funkciókkal.
AN Bus: Mint egy csoportos csevegés
- A CAN busz (Controller Area Network) olyan, mint egy csoportos csevegés a WhatsAppon vagy a WeChaten.
- Minden eszköz (vezérlő, akkumulátor, kijelző, érzékelő, fények) ugyanabban a chatszobában vannak.
- Minden üzenet feladóazonosítóval van ellátva, és minden eszköz csak a neki szánt üzeneteket olvassa el.
- Ez sokkal hatékonyabb és ideális, ha sok összetevőnek kell együttműködnie.
- Használt intelligens, fejlett e-bike rendszerek, gyakran GPS-szel, Bluetooth-szal és alkalmazásintegrációval.
| Jellemző | UART (telefonhívás) | CAN Bus (csoportos csevegés) |
|---|---|---|
| Csatlakozás típusa | Egy-egy (pont-pont) | Egy a sokhoz (megosztott busz) |
| Skálázhatóság | Alacsony - több eszközhöz extra vezetékek szükségesek | Magas - több eszköz osztozik ugyanazon a vezetéken |
| Kommunikációs folyamat | Csak két eszköz között | Minden eszköz ugyanazon a vonalon hallgat és válaszol |
| Komplexitás | Egyszerű | Összetettebb, de erőteljesebb |
| Használati eset | Alap e-bringák (csak kijelző ↔ vezérlő) | Intelligens e-kerékpárok BMS-sel, alkalmazással, érzékelőkkel stb. |
A kommunikációs protokollok szerepe
Az e-kerékpárok kommunikációs protokolljai több fontos célt szolgálnak:
- Adatmegosztás: Ezek lehetővé teszik, hogy a vezérlő valós idejű adatokat küldjön a kijelzőre (sebesség, akkumulátor töltöttségi állapota, hibakódok), és parancsokat kapjon vissza (pl. a segédszint módosítása, lámpák be/ki kapcsolása). Megfelelő protokoll nélkül előfordulhat, hogy nem kap megbízható sebességmérést, vagy nem tudja módosítani a beállításokat.
- Az összetevők koordinálása: A fejlett rendszerekben több mikrokontrollernek kell koordinálnia. Például egy saját akkumulátor-kezelő rendszerrel (BMS) rendelkező intelligens akkumulátor kommunikálhat a motorvezérlővel a túláram megelőzése vagy az akkumulátor pontos százalékos arányának megjelenítése érdekében. A CAN-busz vagy hasonló hálózat lehetővé teszi, hogy az akkumulátor, a motorvezérlő, a kijelző és még az érzékelők is megosszák egymással az információkat egy több csomópontos hálózatban.
- Biztonság és megbízhatóság: A jól megtervezett protokoll biztosítja, hogy hiba vagy jelvesztés esetén (mondjuk egy kábel megsérül) a rendszer észlelni tudja azt, és biztonságos intézkedéseket tud tenni (például lekapcsolni a motor teljesítményét). Az olyan robusztus protokollok, mint a CAN, tartalmaznak hibaellenőrzést és üzenetprioritást ennek kezelésére. Az egyszerűbb analóg jelekből hiányzik az ilyen hibakezelés - ha a gázkar vezetéke meglazul, a vezérlő a zajt tévesen gázkarjelnek értelmezheti, hacsak nincsenek biztonsági rendelkezések.
- Bővíthetőség: A kommunikációs hálózat megkönnyíti az eszközök hozzáadását vagy eltávolítását a funkciókban gazdag e-kerékpárok esetében (GPS-nyomkövetők, lopásgátló indításgátlók, több segédérzékelő stb.). Ahelyett, hogy minden új eszköznek külön vezetékes kapcsolatra lenne szüksége a vezérlővel, egy eszköz csatlakozhat a közös buszhoz, és megoszthatja az adatokat a többivel. Ez a skálázhatóság az egyik fő oka annak, hogy a modern high-end e-kerékpárok a CAN-busz felé mozdulnak el.
Összefoglalva, a kommunikációs protokoll az e-bike elektromos rendszerének gerince, amely biztosítja az összes elektronikus alkatrész összehangolt működését. Egy másik bejegyzésben a két fő protokolltípust (UART és CAN) vesszük górcső alá, megvizsgáljuk, hogyan működik mindegyik, és milyen felhasználási esetekre alkalmasak az e-bike-oknál, és teherszállító e-kerékpárok. ellenőrizze, ha érdekli:
- "Az UART megértése az e-kerékpárokban: Biciklizés: Hogyan hajtja meg az egyszerű soros kommunikáció az autódat?"
- Kezdőbarát útmutató arról, hogy az UART hogyan teszi lehetővé az alapvető adatcserét az e-bike alkatrészek, például a kijelzők és a vezérlők között.
- "Mi az a CAN Bus az e-kerékpárokban? Egy okosabb módja az akkumulátorok, érzékelők és egyéb eszközök csatlakoztatásának "
- Ismerje meg, hogy a modern e-kerékpárok hogyan használják a CAN Bus-t a több eszközzel való kommunikáció, a fejlett kijelzők és a rendszerdiagnosztika támogatására.
Alkalmazási forgatókönyvek: Melyik kommunikációs protokoll melyik e-kerékpárhoz?
Hasznos megérteni, hogy a gyakorlatban hogyan választják az UART-ot és a CAN-t a különböző e-bike-konstrukciókhoz. Két nagy kategóriát fogunk vizsgálni: fogyasztói e-kerékpárok (beleértve a tipikus ingázó vagy szabadidős kerékpárokat) és teherszállító/flotta e-bike-ok (gyakran használják üzleti kiszállításra vagy kölcsönzői flották), megjegyezve, hogy ezek gyakran eltérő prioritásokkal rendelkeznek.

- Standard fogyasztói e-kerékpárok (városi, hegyi, országúti e-kerékpárok): Ezeket a kerékpárokat sokan vásárolják személyes használatra. A belépőszinttől a nagyon magas színvonalúakig terjed a skála. Az alsó kategóriában (költségérzékeny modellek) rendkívül gyakori az UART-kommunikáció. Például egy egyszerű 36 V-os ingázó e-kerékpár, amely egy lépéstempó-érzékelővel és egy egyszerű LED-kijelzővel rendelkezik, valószínűleg UART-ot (vagy akár analóg jeleket) használ a vezérlő és a minimális kijelző között. A hangsúly itt a következőkre helyeződik költséghatékonyság és alapvető funkcionalitás. Sok ilyen kerékpár széles körben elérhető vezérlőket és kijelzőket használ, amelyek de facto UART protokollt használnak, ami azt jelenti, hogy a kerékpár márkák különböző OEM-gyártóktól szerezhetnek be alkatrészeket. Ez vonzó a B2B vásárlók számára, akik rugalmasan akarják használni, mondjuk, egy szebb kijelzőt az "A" szállítótól egy "B" szállítótól származó vezérlővel - amíg mindkettő ugyanabban a formátumban beszél UART-ot, addig működhet (bár ellenőrizni kell a pinouts és a firmware kompatibilitását). A felső kategóriás fogyasztói kerékpároknál, különösen a nagy márkák által gyártott kerékpároknál, a CAN-busz felé mutatkozik a tendencia. A nagy teljesítményű e-MTB-k vagy a nyomatékérzékelőkkel és díszes kijelzőkkel rendelkező e-road kerékpárok CAN-t használhatnak, hogy mindent zökkenőmentesen integráljanak. Egyes márkák azonban még a csúcskategóriás kerékpárokban is használnak UART-ot vagy más saját fejlesztésű soros kapcsolatot; ez gyártónként és tervezési filozófiánként változik.

- Teherszállító e-bringák és kereskedelmi flották: A teherszállító e-kerékpárokat nehéz terhek vagy utasok szállítására tervezték, és gyakran használják vállalkozások (futárszolgálatok, postai kerékpárok stb.). Ezek a kerékpárok általában a következőket helyezik előtérbe robusztusság, biztonság és flottakezelési képességek az elektronika költségei felett. Ebben a szegmensben a CAN-busz igazán teret nyert. Például a teherbringáknak lehet kettős akkumulátorok a hatótávolság növeléséhez - két akkumulátor kezelése kommunikációra van szükség a kisülés kiegyensúlyozásához, vagy legalábbis az egyes akkumulátorok állapotának jelentésére. A CAN megkönnyíti, hogy egy vezérlő ugyanazon a buszon kommunikáljon két BMS-egységgel (egy-egy akkumulátorral). A teherbiciklik további tartozékokkal is rendelkezhetnek: féklámpák, irányjelzők, sőt elektronikus zárak - ezek központi buszon keresztüli koordinálása egyszerűsíti a kábelezést és a vezérlést. Továbbá, mivel a teherszállító e-bike-ok gyakran flottákban működnek, a vállalatok szeretik, ha a telematika rajtuk: GPS-nyomkövetők, amelyek jelentik a kerékpár helyét, használatát és az esetleges hibákat. Egy CAN-kompatibilis rendszerrel egy telematikai modul egyszerűen lehallgathatja a CAN-üzeneteket a sebességről, az akkumulátor állapotáról stb. és feltöltheti ezeket az információkat. Egy európai futárflottával végzett esettanulmány bemutatta, hogy a CAN-buszra való rácsatlakozás lehetővé tette a karbantartási adatok (például a futásteljesítmény) távfelügyeletét, a motor távoli kikapcsolását a lopásgátlás érdekében, valamint a kerékpár firmware-jének levegőn keresztüli frissítését - ezek a funkciók rendkívül hasznosak a flottakezelés szempontjából. Egy UART-alapú kerékpáron ezt nehézkes lenne megvalósítani.
- Mix-and-Match vs. integrált rendszerek: Ha egy e-kerékpár márka szabadságot akar az alkatrészek keverésére vagy az utólagos fejlesztések lehetővé tételére, akkor általában az UART-alapú rendszerekhez ragaszkodik. Láttuk, hogy Az UART-rendszerek lehetővé teszik a kijelzők cseréjét vagy a motorbeállítások egyszerű módosítását.. Egy kisebb e-kerékpár-gyártó cég talán ezt az utat választja, hogy elkerülje az egy beszállítóhoz való kötöttséget - motor/vezérlő beszállítót válthat anélkül, hogy az egész ökoszisztémát megváltoztatná, amíg a protokoll UART marad, és a firmware-t adaptálni tudja. Másrészt, a rendszeroptimalizálásra és a megfelelőségre összpontosító márkák gyakran választják a CAN. A Bosch által hajtott e-kerékpárok például CAN-szerű buszt használnak (a Bosch saját CAN-alapú protokollal rendelkezik), amely összeköti a motort, a kijelzőt és az akkumulátort. Ez biztosítja, hogy semmilyen harmadik féltől származó alkatrész nem zavarhatja meg; minden finoman össze van hangolva. Ennek előnye a kiváló megbízhatóság és biztonság - a rendszer hibát jelez, ha bármi eltér a specifikációtól. A hátránya az, hogy B2B vásárlóként (mint például egy Bosch-t választó kerékpár-gyártó) elkötelezi magát a motor, a vezérlő, az akkumulátor, a kijelző és a kijelző megvásárlása mellett. minden a Bosch-tól csomagban.
- Teherforgalmi kerékpárok - sajátos megfontolások: A teherszállító kerékpárokat - különösen az EU-ban - gyakran szigorúbb ellenőrzésnek vetik alá, mivel nagyobb terhet vagy akár utasokat is szállíthatnak. Németországban például létezik egy szabvány (DIN 79010), amely kifejezetten a teherbiciklik biztonságára vonatkozik (főként mechanikai szempontok, például a váz szilárdsága és a fékezés). Bár ez a szabvány nem írja elő a kommunikációs protokollokat, a a biztonságot előtérbe helyező gondolkodásmód a teherbiciklikben egy olyan protokoll használatára ösztönöz, amely például biztosíthatja, hogy ha valami baj van (túlmelegedő motor vagy lemerült akkumulátor), a rendszer ezt közölni tudja, és intézkedni tud. A CAN robusztussága és hibakezelése segít elérni ezeket a biztonsági célokat. Emellett a teherszállító e-bike-ok gyakran városi környezetben működnek (városi szállítás), ahol sok a rádiós/elektromos zaj, és nagy a tét, ha egy kommunikációs hiba rosszkor következik be. A a CAN zajimmunitás nagy előnye, hogy megelőzi a félreérthető kommunikációt, amely kiszámíthatatlan viselkedéshez vezethet.


Az elektromos rendszer biztonsági szabványai és megfelelősége (EU/USA)
Az alkalmazott kommunikációs protokolltól függetlenül az e-kerékpárok elektromos rendszereinek be kell tartaniuk a biztonsági szabványokat, hogy biztonságosan és jogszerűen működjenek, különösen az olyan kulcsfontosságú piacokon, mint Európa és az Egyesült Államok. A kommunikációs protokoll közvetett módon befolyásolhatja a kerékpár megfelelőségét - például egy olyan protokoll, amely korlátlanul lehetővé teszi a felhasználó számára a módosításokat, kockázatot jelenthet a megfelelőség szempontjából, míg egy olyan protokoll, amely le van zárva, segíthet biztosítani, hogy a kerékpár a törvényes határokon belül maradjon. Bontsuk fel a vonatkozó szabványokat és azok kapcsolatát:
Hogyan befolyásolják a kommunikációs protokollok az ebike megfelelőségét az Európai Unióban?
Európai Unió (EU) - EN 15194: Az EU-ban a legtöbb e-kerékpár (pedálos segédmotoros kerékpár, amelynek motorteljesítménye <= 250 W, és a segítségnyújtás 25 km/h-nál leáll) a következő kategóriába tartozik EPAC-k (Elektronikusan táplált ciklusok). A szabvány EN 15194 az EPAC-kra vonatkozik, és meghatározza a biztonságra és a teljesítményre vonatkozó követelményeket és vizsgálati módszereket. Ez magában foglalja a mechanikai biztonságot (fékek, váz stb.) és az elektromos biztonságot (kábelezés, EMC stb.), valamint annak biztosítását, hogy a kerékpár megfeleljen a sebesség- és teljesítményhatároknak.
- A kommunikációs protokollok esetében az egyik lényeges szempont a következő elektromágneses összeférhetőség (EMC): a rendszer nem sugározhat túlzott mértékű interferenciát, és nem befolyásolhatják indokolatlanul az interferenciák. Egy jól megtervezett CAN- vagy UART-kommunikációs vonalnak át kell mennie az EMC-teszteken (az EN 15194 az EN 55014-re vagy hasonlóra hivatkozik az EMC tekintetében). A a CAN zajálló jellege előnyös lehet az EMC-követelmények teljesítése szempontjából, mivel természeténél fogva jobban kezeli a zajt, de az UART-rendszerek is megfelelnek a követelményeknek, ha megfelelően árnyékolva vannak.
- Sebesség és teljesítmény manipulálása: Az EN 15194 szabvány előírja, hogy az asszisztensnek 25 km/h sebességnél le kell állnia, és a felhasználónak nem szabad ezt a határértéket könnyen a törvényes érték fölé állítania. Ha egy kerékpár UART-ot használ, és a gyártó hozzáférhetővé teszi a programozási felületeket, a felhasználónak lehetne potenciálisan feloldhatja a korlátozást - ez megfelelési problémákat vethet fel. Egyes gyártók ezért kifejezetten azért használnak zárolt CAN-rendszereket, hogy megakadályozzák, hogy a felhasználók megváltoztassák a sebességhatárt. A Bafang CAN-alapú motorjainál például a sebességhatár rögzített, és a kijelzőn keresztül nem módosítható, ami segít biztosítani az előírásoknak való megfelelést. Ezzel szemben sok UART-rendszernél a hozzáértő felhasználó beléphet a kijelzőn a beállítási módba, és módosíthatja a kerékméretet vagy a sebességhatárt, vagy használhat programozó kábelt, ami a törvény betűjét is megszegheti, ha a kerékpárral túllépi a 25 km/h-s asszisztenst.
- Elektromos biztonság: Az EN 15194 (legutóbbi módosítások) az alapvető elektromos biztonsággal foglalkozik, de érdekes módon nem terjed ki teljes mértékben az akkumulátor biztonságára - feltételezi, hogy maga az akkumulátorcsomag más szabványoknak is megfelel. Inkább az integrációra, a kábelezésre és az alapvető védelemre (pl. nincsenek szabadon lévő feszültség alatt álló alkatrészek stb.) összpontosít. A kommunikációs protokoll közvetlenül nem befolyásolja ezt, de közvetve egy olyan protokoll, mint a CAN, amely lehetővé teszi, hogy a BMS beszéljen a vezérlővel, növelheti a biztonságot - pl. a BMS "leállítani a kisütést" parancsot küldhet, ha az akkumulátor túlmelegszik. Bár az EN 15194 szabvány nem írja elő, az ilyen funkciók segítenek a kerékpárnak megfelelni az általános biztonsági elvárásoknak (a termikus elszabadulás elkerülése).
Ezenkívül az európai teherszállító e-kerékpároknak (különösen azoknak, amelyek árut/utasokat szállítanak) meg kell felelniük az alábbi előírásoknak Gépekről szóló irányelv ha nem tartoznak szigorúan a kerékpáros szabályok hatálya alá (néhány nehéz teherkerékpár igen). Ez ismét a robusztus hibabiztosításokat hangsúlyozza. Egy megbízható kommunikációs protokoll használata hibabiztos viselkedéssel (például a CAN hiba esetén történő leállítása) segítheti a megfelelőséget.
További információ a Az e-kerékpár uniós szabványa
Hogyan befolyásolják a kommunikációs protokollok az ebike megfelelőségét az Egyesült Államokban?
Egyesült Államok - UL 2849 és mások: Az Egyesült Államokban az e-kerékpár gyártása szövetségi szinten egy kicsit kevésbé szabályozott a teljesítmény tekintetében (van egy fogyasztói termék definíciója a kis sebességű e-kerékpárnak, amely 750W max. és 20 mph gázzal/28 mph pedálsegítséggel, de nincsenek kötelező építési szabványok szövetségi szinten). Azonban, a biztonsági tanúsítás egyre fontosabbá válik, különösen az akkumulátorokból eredő tűzzel kapcsolatos aggályok miatt.
- UL 2849 az e-kerékpárok elektromos rendszereinek első számú biztonsági szabványa Észak-Amerikában. Az e-kerékpár teljes elektromos meghajtórendszerére vonatkozik - beleértve az akkumulátort, a motort, a töltőt és az összes összeköttetést. Az UL 2849 tesztelés olyan dolgokat vizsgál, mint például, hogy a vezetékezés képes-e kezelni az áramot, hogy a rendszer védett-e a rövidzárlatok ellen, és ami még fontosabb, hogy a következőkre is kiterjed. UL 2271 az akkumulátorokhoz (amely egy akkumulátorspecifikus biztonsági szabvány). Kommunikációs szempontból az UL 2849 nem ír elő protokollt, de ellenőrzi, hogy például a kommunikáció megszakadása vagy hiba észlelése esetén a rendszer biztonságosan meghibásodik (nincs hőhatás, nincs elszabadult motor). A CAN-alapú rendszer némi előnyt jelenthet a redundancia bizonyításában (pl. ha a fojtószelep-üzenet elveszik, a CAN képes ezt észlelni, és megfelelő időzítéssel kikapcsolni). De még az UART-rendszerek is úgy tervezhetők, hogy megfeleljenek az UL 2849 szabványnak (csak alapos hibakezelést kell végezniük a vezérlő firmware-ében).
- Tűz és áramütés megelőzése: Az olyan szabványok, mint az UL 2849, az elektromos tüzek és áramütések megelőzésére összpontosítanak. Ha például egy e-bike-hoz töltő van csatlakoztatva, az akkumulátor és a töltő közötti kommunikáció (ha van ilyen) nem vezethet túltöltéshez. Figyelemre méltó, hogy a EnergyBus szabvány az általunk említett, CAN-alapú, részben a biztonság motiválta - annak biztosítása, hogy bármely töltő biztonságosan tölthet bármilyen akkumulátort a CANopen-en keresztül történő kommunikációval, és csak akkor engedélyezi a tápellátást, ha a megfelelő kézfogás megtörtént. Az EnergyBus egy speciális csatlakozót használ, amely CAN adatvonalakat tartalmaz, így a töltő és az akkumulátor először kommunikációt létesít, majd engedélyezi a töltési áramot, hogy elkerülje a szikrákat vagy a nem megfelelő feszültségeket . Ez a koncepció jól illeszkedik az UL biztonsági logikájához. Ha egy márka EnergyBus-t használ, az valószínűleg segít a biztonsági tanúsítványok átadásában, mivel természeténél fogva biztonságos kölcsönhatásokat kezel az alkatrészek között.
- Szabályozási megfelelés (sebesség/teljesítmény): Az Egyesült Államokban az osztályozási rendszer (1., 2., 3. osztályú e-kerékpárok) nagyrészt becsületbeli rendszer, és nem olyan szigorúan betartott, mint az uniós korlátozások, de felelősségi okokból a gyártók általában biztosítják, hogy a 2. osztályúként értékesített e-kerékpárokat ne lehessen könnyen átalakítani, hogy például gázelvétellel meghaladják a 20 mérföld/órás sebességet. Itt is segíthet a zárt CAN-protokoll használata - a felhasználók nem tudnak csak úgy bedugni egy kábelt, és a kerékpárt derestrictálni. Figyelemre méltó, hogy sok e-bike cég ma már UL-tanúsítvánnyal rendelkező akkumulátorokat vagy rendszereket hirdet, hogy biztosítsa a vásárlókat a biztonságról. Például a HOVSCO (amint az a tudásbázisukban látható) hangsúlyozza, hogy kerékpárjaik megfelelnek az UL 2849 szabványnak az elektromos biztonság és az EN 15194 szabványnak az általános biztonsági megfelelés tekintetében . Ez azt jelenti, hogy a vezetékeiknek, csatlakozóiknak és kommunikációs rendszereiknek veszélyeztetés nélkül kell működniük.
Nemzetközi és egyéb szabványok: Az EN 15194 és az UL 2849 szabványokon kívül más vonatkozó szabványok is léteznek - pl, ISO 4210 (kerékpárbiztonsági szabvány) egy olyan részével, amely az e-kerékpárra vonatkozó követelményeket tartalmazza, és a német DIN 79010 a teherforgalmi kerékpárokhoz (amit megjegyeztünk, olyan dolgokat foglal magában, mint a váz szilárdsága teherterhelés alatt és a fékezési teljesítmény) . Ezek közvetlenül nem írják elő az elektronikát, de egy teherbringa szabvány implicit módon megkövetelheti, hogy mondjuk az asszisztens ne hibásodjon meg nagy terhelés alatt. A robusztus kommunikáció biztosítja, hogy még akkor is, ha a kerékpár megterhelődik (és esetleg az elektromos zajok felerősödnek vagy az akkumulátor megereszkedik), az akkumulátor, a vezérlő és az érzékelők közötti jelek megbízhatóak maradnak.
Összefoglalva, a megfelelés és a biztonság néhány tervezési döntést befolyásol az UART vs. CAN között. A maximális biztonságra törekvő gyártó a hibaellenőrzés és vezérlés tekintetében a CAN felé hajlik, vagy az UART-rendszereknél extra biztosítékokat vezet be. Mindkét protokoll része lehet a biztonságos tervezésnek, de kulcsfontosságú, hogy hogyan használják őket. A a CAN-rendszerek zárt jellege kikényszerítheti a megfelelőséget (pl. a felhasználók által nem szabályozható sebességkorlátozások, ahogyan azt a törvény előírja) , mivel Az UART-rendszerek nagyobb felhasználói szabadságot kínálnak, ami kétélű kardot jelent. A gyártóknak biztosítaniuk kell, hogy még az UART-alapú kerékpárok is rendelkezzenek olyan dolgokkal, mint a fizikai vagy szoftveres korlátozó, amelyet nem lehet könnyen feltörni, hogy a törvényes határokon belül maradjanak.
Végül, a protokolltól függetlenül, a minőségi csatlakozók és vezetékek a megfelelés része. Az EU-ban a kerékpárnak ki kell bírnia a rezgéseket anélkül, hogy a vezetékek meglazulnának, és nedves körülmények között rövidzárlat nélkül. Az olyan csatlakozók, mint a Higo/Julet (az e-kerékpárokban széles körben használt vízálló csatlakozók) nem csak a kényelem miatt népszerűek, hanem azért is, mert segítenek megfelelni a következő követelményeknek. IP-besorolások és megbízhatósági követelmények. A CAN-busz jellemzően ilyen csatlakozókat használ (pl. egyetlen Higo 4 vagy 5 tűs csatlakozó szállíthatja a CAN-adatokat és a kijelző tápellátását). A protokoll megválasztása nem változtat a jó minőségű húzásmentesítés, szigetelés és reteszelő csatlakozók a szétkapcsolódások megelőzése érdekében (ami veszélyes lehet, ha például a fékkapcsoló jel nem jut el a vezérlőhöz, mert egy kábel meglazult).
E szakasz zárásaként elmondható, hogy mind Európában, mind az Egyesült Államokban nagy hangsúlyt fektetnek az e-kerékpárok biztonságára. Az olyan szabványoknak való megfelelés, mint az EN 15194 és az UL 2849 egyre inkább nem tárgyalható a jó hírű márkák számára. A kommunikációs protokoll a kirakós játék egyik darabja - az elektromos rendszer összehangolt és üzembiztos működését biztosító eszköz. A CAN-busz megbízhatósága segíthet ezeknek a szabványoknak való megfelelésben azáltal, hogy robusztus kommunikációt biztosít, míg az UART-rendszerek gondos tervezést igényelnek ahhoz, hogy ugyanolyan biztonságosak legyenek. A gyártók gyakran azt a protokollt választják, amelyik a legjobban illeszkedik a megfelelőségi stratégiához: Az UART az egyszerűbb konstrukciókhoz, ahol a kockázat könnyen kezelhető, vagy a CAN az összetett rendszerekhez, ahol a biztonsági funkciók kiemelkednek.
Költségek és piaci megfontolások a kommunikációs protokollok kiválasztásakor
A kommunikációs protokollok közötti döntésnél (vagy általában az e-kerékpár elektromos rendszerének megtervezésekor) a költség fontos tényező - nem csak a pénzbeli költség, hanem a rugalmasság és a beszállítói kapcsolatok "költsége" is. Íme, hogyan hasonlítják össze a költségeket, és mit vesznek figyelembe a B2B-vásárlók vagy mérnökök:
- Hardverköltség: Amint azt korábban említettük, az UART-alapú rendszer jellemzően egyszerűbb hardvert használ. A vezérlőnek és a kijelzőnek csak UART-képességre van szüksége, amellyel gyakorlatilag minden mikrokontroller rendelkezik. A kábelezés egy kicsit egyszerűbb lehet (kevesebb lezárási szempont stb.). A CAN-alapú rendszer kicsit többet igényel: CAN adó-vevő chipet minden egyes eszközhöz, és esetleg egy erősebb MCU-t (bár manapság még a meglehetősen olcsó MCU-k is rendelkeznek beépített CAN-vel). A tényleges BOM (Bill of Materials) különbség nagy mennyiségben mindössze néhány dollár nagyságrendű lehet kerékpáronként, de egy versenypiacon ez még mindig számít. Egy nagy kerékpárflotta megrendelése esetén ezek a dollárok megsokszorozódnak. Ez azt jelenti, hogy a a CAN hardver költségei csökkentek jelentősen, és a CAN által biztosított többletfunkciókkal könnyen indokolható a kompromisszum.
- Fejlesztési és integrációs költségek: Egy induló e-kerékpár-gyártó vagy kisvállalat számára a CAN-alapú rendszer nulláról történő kifejlesztése költséges lehet, ha nem rendelkeznek házon belüli szakértelemmel. Ez a CAN-hez értő beágyazott rendszertechnikusok alkalmazását, eszközökbe való befektetést és az egyedi firmware kifejlesztésére fordított időt jelentheti. Alternatív megoldásként, ha kész rendszert vásárolnak (például Bosch vagy Shimano meghajtóegységeket, amelyek CAN-alapúak), akkor a fejlesztési költség a saját oldalukon alacsonyabb, de az egységköltség magasabb (a Bosch rendszerek prémium árúak, részben azért, mert teljesen integrált megoldást és a márkanevet kapják). A Az UART rendszer gyakran összeállítható a készleten lévő alkatrészekből ismert kompatibilitással - például sok vállalat használ nyílt forráskódú vagy szabványos protokollokat, ahol a tervezés nagy része már megtörtént, és a kockázat alacsonyabb. Egy B2B vásárló (mondjuk egy olyan vállalat, amely egy csomó e-kerékpárt szeretne a saját márkája alatt) számára az UART választása azt jelentheti, hogy olcsóbb általános alkatrészeket tud beszerezni, míg a CAN választása gyakran egy adott beszállító ökoszisztémájához való igazodást jelent (amely licencdíjat vagy magasabb árakat számíthat fel).
- Értékesítés utáni és karbantartási költségek: Ezt néha figyelmen kívül hagyják. Egy flottaüzemeltető (például egy kerékpármegosztó vagy egy futárcég) úgy találhatja, hogy A CAN-buszos kerékpárok pénzt takarítanak meg a karbantartáson. Miért? Mert távolról vagy gyorsabban tudják diagnosztizálni a problémákat. Egy CAN-kapcsolattal rendelkező rendszer részletesen jelentheti a hibakódokat (például "akkumulátor #2 hőmérséklet-érzékelő hiba", mint konkrét kód). A technikusok diagnosztikai eszközöket csatlakoztathatnak a CAN-buszhoz, hogy pontosan meghatározzák a problémákat. Ez csökkentheti a munkaidőt. Ahogy az IoT Venture esetében is látható, olyan dolgok is lehetségesek, mint a távoli firmware-frissítés, ami megtakaríthatja a kerékpárok fizikai visszahívásának költségeit bizonyos javításokhoz. Másrészt, egy UART kerékpár kezdeti karbantartása egyszerűbb lehet (talán kevesebb dolog romlik el a kommunikációban), de ha valami baj van, akkor lehet, hogy próbálgatni kell az alkatrészcserét, mivel a rendszer nem tudja megmondani, hogy pontosan mi a baj, azon túl, hogy esetleg felvillan egy LED. Egy egyéni fogyasztó számára egy UART kerékpár javítása olcsóbb lehet, mert a javításhoz a készleten lévő alkatrészeket és a közösségi tudást használhatja, míg egy CAN kerékpár esetén kénytelen lehet hivatalos szervizbe fordulni (ami potenciálisan drágább). Tehát a költségek között kompromisszumot kell kötni a következők között felhasználó-kiszolgálhatóság (UART nyer) és fejlett diagnosztikai támogatás (CAN nyer, ami csökkentheti a szakmai szolgáltatások költségeit).
- Licencelési és tulajdonosi költségek: A szabadalmaztatott CAN protokoll használata licencdíjakkal vagy korlátozásokkal járhat. Ha egy kerékpármárka saját CAN-protokollt fejleszt ki, az rendben van, de ha valami olyasmit használ, mint a CANopen vagy az EnergyBus, akkor esetleg be kell tartania a szabványokat, és esetleg csatlakoznia kell egyesületekhez (pl. EnergyBus e.V.). Ezek a költségek általában csekélyek, de érdemes megjegyezni. Az olyan saját rendszerek, mint a Bosch, gyakorlatilag azt jelentik, hogy a kerékpárgyártó OEM csomagként vásárolja meg a meghajtóegységeket; a Bosch határozza meg az árat. Az UART-rendszerek esetében gyakran nagyobb a verseny az alkatrész-beszállítók között, ami az árakat le tudja szorítani.
- Ügyfélérzékelés és érték: Marketing szempontból egy márka indokolhatja a magasabb árat egy olyan kerékpárért, amely "autóipari minőségű CAN-busz elektronikával" rendelkezik, mivel ez fejlettnek és megbízhatónak hangzik (még akkor is, ha a vásárló közvetlenül nem látja a különbséget). Értéket képvisel a prémium érzés és teljesítmény amelyekkel a CAN-rendszerek gyakran együtt járnak (általában olyan kerékpárokon vannak, amelyekben kiváló minőségű motorok stb. is vannak). Így a felső kategóriás piacot vagy a kereskedelmi ügyfeleket megcélzó márkák a CAN-t prémiumkínálat részeként használhatják ki. Ezzel szemben a belépő szintű e-kerékpárok esetében a vásárlóknak leginkább az számít, hogy működjön és megfizethető legyen - nem fognak felárat fizetni csak azért, mert a kerékpár kijelzője CAN-t használ UART helyett. Szóval, a protokollválasztásnak igazodnia kell a kerékpár piaci szegmenséhez.
- Jövőbiztosítás: A mérnökök által figyelembe vett költség a a jövőre nézve nem megfelelő képességek hiányának alternatív költségei. Ha most egy UART-alapú platformba fektet be, de jövőre több funkciót szeretne hozzáadni (mondjuk egy második akkumulátort vagy egy új érzékelőtípust), akkor előfordulhat, hogy a régi platform korlátozónak bizonyul, ami újratervezésre kényszeríti. Néhány vállalat úgy dönt, hogy hosszú távon költséghatékonyabb a CAN-t használni a kezdetektől fogva, még ha nem is használják ki teljesen, hogy teret hagyjanak az új funkciók és tartozékok számára. Ez az út során megtakaríthatja az újratervezési költségeket. Ez egy stratégiai döntés: előzetesen kicsit többet fizetni, szemben a későbbi, esetlegesen sokkal többe kerülő frissítéssel.
Ami a tényleges árakat illeti: nehéz meghatározni, de egy iparági bennfentes azt mondaná, hogy például egy alapvető UART e-bike vezérlő + kijelző készlet lehet, mondjuk, $50-$100 ömlesztve, míg egy egyenértékű CAN-alapú készlet egy nagy márkától néhány száz dollár lehet (mert kifinomultabb). Ez a különbség azonban gyakran a jobb motorteljesítményt, garanciát stb. is magában foglalja, nem csak a kommunikációs különbséget. A kizárólag a protokollra vonatkozó többletköltségek (pl. egy CAN chip hozzáadása) kicsi, de a az ökoszisztéma költségei (egy drága rendszerhez való csatlakozás egy olcsó általános rendszerrel szemben) nagy lehet.
Egyszerűen fogalmazva egy B2B e-bike vásárló számára:
- Ha az Ön prioritása legalacsonyabb fajlagos költség és rugalmasan szeretne több beszállítótól beszerezni, akkor egy UART-alapú nyílt rendszer vonzó. Körülnézhet a megfelelő kijelzők és vezérlők között, esetleg több gyárral is tárgyalhat.
- Ha az Ön prioritása teljesítmény, megbízhatóság és kulcsrakész rendszer (és hajlandó fizetni érte), egy CAN-alapú rendszer egy jó hírű beszállítótól fejfájástól kímélheti meg Önt, és hozzáadott értéket adhat a termékéhez (magasabb költséggel, amelyet remélhetőleg a kerékpárok magasabb árazásával vagy a mennyiségi hatékonysággal térít meg).
Korlátozások és jövőbeli tendenciák
Még ha az UART és a CAN erényeit dicsérjük is, érdemes megjegyezni, hogy a az e-kerékpáros kommunikáció jelenlegi állapotának korlátai és hogy merre tarthatnak a dolgok:
- Az iparági szintű szabványosítás hiánya: Ellentétben az autóiparral, ahol szinte minden autó CAN-buszt és szabványosított diagnosztikát (OBD-II) használ, az e-kerékpár-ipar még mindig széttagolt. Van nincs egyetlen egyetemes protokoll amelyet minden e-kerékpár használ. Az UART implementációk eltérőek (az egyes gyártók különböző adatformátumokat használhatnak az UART-on keresztül), a CAN implementációk pedig gyakran szabadalmaztatottak. Ez korlátozza a fogyasztókat és a kerékpár-összeszerelőket - nem "plug and play" a különböző márkák között. Nem vehet egy tetszőleges kijelzőt, és nem várhatja el, hogy egy tetszőleges vezérlővel működjön, hacsak nem használják kifejezetten ugyanazt a protokollt és firmware-t. EnergyBus ígéretes törekvés a szabványosításra (a CANopen CiA-454 meghatározza az e-kerékpár alkatrészek üzeneteit) , de még nem terjedt el. Ha az EnergyBus vagy hasonló szabványok teret nyernek, akkor valóban átjárható alkatrészeket láthatunk - például az X gyártó akkumulátora használható az Y gyártó motorrendszerével, és a CANopen-alapú protokoll biztosítja, hogy a kettő megérti egymást. Ez előnyös lenne a B2B vásárlók (több beszállítói lehetőség) és a fogyasztók (több frissítési/javítási lehetőség) számára. Az iparági szereplőknek azonban üzleti motivációjuk is van a saját rendszerek fenntartására (a vevők megtartása érdekében). A feszültség a következők között szabványosítás vs. tulajdonosi ellenőrzés az e-kerékpár protokollok jövőjét fogja alakítani.
- Sávszélesség és adatigény: Jelenleg az e-kerékpár kommunikáció viszonylag kevés adatot tartalmaz. A jövőbeli e-bike-ok azonban több információt is továbbíthatnak - képzelje el a nagyfrekvenciás nyomatékérzékelő adatok gyűjtését, vagy a nagy felbontású teljesítményméréseket képzési célokra, vagy akár a biztonsági kamerák videóit. A CAN a klasszikus sebességeknél szűk keresztmetszet lehet, ha sok adatot kell küldeni. Az autóiparban a CAN-FD (a CAN kibővített változata nagyobb adatkeretekkel és nagyobb átviteli sebességgel) és más protokollok, például az Ethernet, a nagy sávszélességű igények kielégítésére szolgálnak. Az e-kerékpárok esetében szükség esetén a CAN-FD is megjelenhet, vagy a BLE/Wi-Fi az adattárolási naplók átvitelére. Vezeték nélküli kommunikáció kiegészítheti a vezetékes protokollokat: már most is sok e-kerékpár használja a Bluetooth Low Energy-t a kerékpár és az okostelefon-alkalmazás összekapcsolására. Ez kívül esik a belső elektromos rendszer hatókörén, de párhuzamos csatornaként érdemes megemlíteni. Talán a jövőben néhány egyszerűbb e-kerékpár lemondhat a vezetékes kijelzőről, és vezeték nélküli modult használhat a telefonhoz - bár a kritikus vezérlés (például a gázpedál vagy a fék jelzései) a megbízhatóság érdekében valószínűleg vezetékes maradna. A teherszállító flottákban a V2X (vehicle-to-everything) kommunikáció nagyobb integrációját láthatjuk - az e-bike-ok beszélgetnek a logisztikai rendszerekkel vagy a közlekedési infrastruktúrával, ami szintén az alapvető CAN-buszrendszerre épülne.
- Biztonsági aggályok: Ahogy az e-kerékpárok összekapcsolódnak és egyre összetettebb kommunikációt használnak, kiberbiztonság aggodalomra ad okot. A külső csatlakoztathatóság nélküli UART-rendszer gyakorlatilag immunis a hackelésre (valakinek fizikailag rá kellene csapolnia a vezetékekre). A Bluetooth-modullal vagy GSM-modullal (flottakövetéshez) összekapcsolt CAN-busz azonban potenciális sebezhetőséget jelent. A gyártóknak biztosítaniuk kell, hogy a protokolljaik (különösen a buszhoz való vezeték nélküli interfészek) biztonságosak legyenek a rosszindulatú irányítás megakadályozása érdekében (képzeljünk el egy IoT-hacket, amely távolról le tudna kapcsolni egy futármotoros flottát - ez egy távoli, de elméletileg lehetséges forgatókönyv, ha nincs biztosítva). A szabadalmaztatott protokollok természetüknél fogva némileg biztonságosak az ismeretlenség révén, de ahogy a CAN az e-kerékpárokban általánossá válik, a rosszfiúk megpróbálhatnak CAN-üzeneteket bejuttatni egy szabadon hozzáférhető porton keresztül. Ezért a jövőben több titkosítást vagy hitelesítést láthatunk az e-kerékpárok kommunikációjában.
- Felhasználói élmény: Végső soron, bármelyik protokollt is használják, annak jó felhasználói élményt kell nyújtania. A motorosok számára fontosak az olyan dolgok, mint a zökkenőmentes energiaellátás, a kijelzőn megjelenő pontos információk és a szükség esetén működő biztonsági funkciók. A korai CAN-alapú rendszerek egyik korlátja az volt, hogy néha too lezárták - a felhasználók frusztráltnak érezték magukat, hogy még az egyszerű beállításokat sem tudták megváltoztatni. Ahogy a rendszerek kiforrottak, a gyártók megtalálhatják a módját annak, hogy a felhasználóknak rugalmasságot biztosítsanak (engedélyezett alkalmazásokon vagy beállításokon keresztül) anélkül, hogy a vezérlést veszélyeztetnék. Például egy alkalmazás lehetővé tehetne korlátozott tuningot (biztonságos keretek között) még a CAN-rendszerben is, vagy engedélyezhetné, hogy harmadik féltől származó, tanúsított tartozékok kommunikáljanak a buszon (esetleg EnergyBus szabványos üzenetekkel). A protokollok szabványosításával egy kicsit nagyobb nyitottságra számíthatunk, ironikus módon még a CAN világában is.
Végezetül, a az e-kerékpárok elektromos kommunikációs rendszere - akár UART, akár CAN - döntő fontosságú a kerékpár teljesítménye, biztonsága és modularitása szempontjából.. Az e-kerékpárokat tervező mérnököknek egyensúlyt kell teremteniük az UART egyszerűsége és a CAN kifinomultsága között. A B2B-vásárlóknak mérlegelniük kell, hogy a választás hogyan befolyásolja a költségeket, az ellátási láncot és a termékük értékteremtését. Úgy tűnik, hogy az iparág a CAN-busz felé tendál, ahogy az e-kerékpárok egyre jobban összekapcsolt és alkalmasabb gépekkel fejlődnek, de az UART-alapú rendszerek valószínűleg még egy ideig párhuzamosan maradnak az egyszerűbb, alacsonyabb költségű modellekben (végül is a kerékpárosok nagy szegmense számára "elég jók").
Ezen kommunikációs protokollok megértésével - lényegében a elektromos nyelv az e-kerékpárokról - sokkal mélyebben megértjük, hogyan működik egy e-kerékpár belülről. A gázpedál csavarásától vagy a pedálok nyomásától kezdve a motor lökésén át a kijelzőn megjelenő számokig, mindezt bitek és bájtok teszik lehetővé, amelyek a vezetékeken keresztül száguldoznak, biztosítva, hogy az akkumulátor, a motor és a lovas szinkronban van egymással. És legyen szó akár egy elegáns városi e-bike-ról, akár egy nehéz teherszállítóról, ez a harmónia teszi az utazást könnyeddé és biztonságossá. Végső soron minden protokoll célja, hogy a technológia háttérbe szoruljon, hogy a kerékpárosok egyszerűen élvezhessék az utazást - de most már remélhetőleg némi rálátással a lábuk alatt zajló lenyűgöző elektronikus koordinációra.
Források:
- Qiolor Ebike útmutató - "Hogyan válasszon kompatibilis kijelzőt az Ebike vezérlőjéhez" (2025) - az UART vs. CANBUS nyelvek és a megfelelő protokollok fontosságának megvitatása.
- Velco.tech - "CAN vs UART: különbségek a kommunikációs módok között" (2024) - az UART egyszerűségének és a CAN hálózati képességeinek magyarázata, valamint az előnyeik/korlátozásaik felsorolása .
- Biktrix Súgóközpont - "Mi a CANBUS és az UART protokoll?" - felhasználó-központú nézet arról, hogy a CAN rögzíti a beállításokat (sebességhatár fix) vs UART lehetővé teszi a módosításokat , valamint a kijelző cserélhetőségének összehasonlítása.
- IoT Venture (esettanulmány a CYCLE flottával) - a CAN integráció előnyeinek leírása az e-kerékpár flottákban: karbantartási adatokhoz való hozzáférés, távoli motorlekapcsolás, OTA frissítések .
- HOVSCO tudás - "Milyen biztonsági funkciókkal rendelkeznek az elektromos kerékpárok?" - megjegyzések az EN 15194 (EU) szabványról, amely a sebesség/teljesítményhatárokat és a tartósságot biztosítja, és az UL 2849 (USA) szabványról, amely az elektromos/tűzbiztonságra összpontosít, valamint a DIN 79010 szabvány említése a teherbiciklik biztonságáról.
- Texas Instruments App Note - "Hardvertervezési megfontolások egy elektromos kerékpárhoz BLDC motorral" - tipikus e-bike rendszer blokkdiagramokat és betekintést nyújtott a vezérlő elektronikába.
- Letrigo Ebike tudás - "E-bike kijelző kábelezés magyarázata" - részletek a kábelezésről, csatlakozókról (Higo/Julet) és figyelmeztet arra, hogy nem létezik univerzális kábelezési szabvány, hangsúlyozva a csatlakozások megfelelő illesztését és a jelintegritás érdekében a robusztus kábelezést.
- EnergyBus szabvány - Bevezetés a Kvaser-től - az EnergyBus nyílt CANopen-alapú szabvány a LEV komponensek számára a gyártók közötti kompatibilitás és biztonság biztosítása érdekében.




