
Las bicicletas eléctricas (e-bikes), incluidas las de carga, se basan en un complejo sistema eléctrico que conecta la batería, el motor, el controlador, los sensores y la interfaz de usuario. Los protocolos de comunicación de este sistema son el "lenguaje" que permite que todos estos componentes se coordinen a la perfección. En este repaso de divulgación científica, explicaremos qué son estos protocolos de comunicación y cómo funcionan dentro de los sistemas eléctricos de las e-bikes. Cubriremos los tipos de protocolos utilizados, en qué se diferencian, dónde se aplica cada uno, sus pros y sus contras, las consideraciones de coste, el cumplimiento de las normas de seguridad en la UE y EE.UU., y las limitaciones. El objetivo es ofrecer una guía clara y autorizada a nuestros clientes y a nuestro público, equilibrando la profundidad técnica con la comprensión práctica.
Componentes clave de la E-Bike - El "sistema nervioso"
Se puede pensar que las bicicletas eléctricas tienen un sistema nervioso central de cables y enlaces de datos que conectan todos los componentes críticos. Al igual que los nervios transportan señales en el cuerpo, el mazo de cables transporta señales de energía y datos a través de la bicicleta. Los componentes clave de un sistema eléctrico típico de e-bike incluyen:

- Batería: La fuente de alimentación de CC (normalmente 36-48 V) que suministra energía al sistema . Se conecta al controlador mediante gruesos cables de alimentación (con fusibles o disyuntores de seguridad) para suministrar la corriente principal. Algunas baterías avanzadas también tienen un enlace de datos (a través de líneas de comunicación) para compartir señales de estado o control con el controlador.
- Motor y controlador: El motor (motor de buje en una rueda o un mid-drive en la biela) recibe energía del controlador del motor, que es el "cerebro" que regula la salida del motor basándose en las entradas del ciclista y la retroalimentación del sensor . El controlador es una unidad electrónica con un microprocesador que recibe señales (acelerador, sensor de pedal, frenos, etc.) y gestiona la alimentación del motor. Los motores suelen tener cables de fase (cables pesados que transportan la energía) y cables sensores (cables finos de los sensores de efecto Hall que proporcionan información sobre la posición del rotor) que van al controlador.
- Interfaz humana (acelerador, sensor de pedaleo, pantalla): El ciclista se comunica con la e-bike a través de dispositivos como el acelerador (a menudo un puño de manillar con un sensor de efecto Hall que emite una señal de tensión variable para solicitar velocidad) , y el sensor de pedaleo asistido (PAS) que detecta el movimiento de pedaleo a través de imanes y sensores . La unidad de visualización en el manillar muestra la velocidad, el nivel de batería, el nivel de asistencia, etc., y a menudo incluye botones para que el ciclista ajuste la configuración. La pantalla y el controlador intercambian datos a través de un cable multifilar que incluye líneas de alimentación y comunicación .
- Interruptores de seguridad (palancas de freno): Las palancas de freno de las bicicletas eléctricas suelen tener interruptores de corte que envían una señal al controlador para cortar inmediatamente la potencia del motor al frenar. Por lo general, un simple circuito de dos hilos se utiliza para esto, actuando como una señal de encendido / apagado para el controlador .
- Iluminación y accesorios: Muchas e-bikes también integran luces delanteras/traseras, claxon, cargadores USB, etc. Pueden estar controlados por el controlador principal o funcionar en circuitos independientes, pero en los sistemas de gama alta también pueden controlarse a través del bus de comunicaciones.
Para una guía detallada de accesorios para ebikes y bicicletas de carga, puede lea este artículo para obtener una respuesta más completa o consulte nuestra Página Cargo Bike 101.
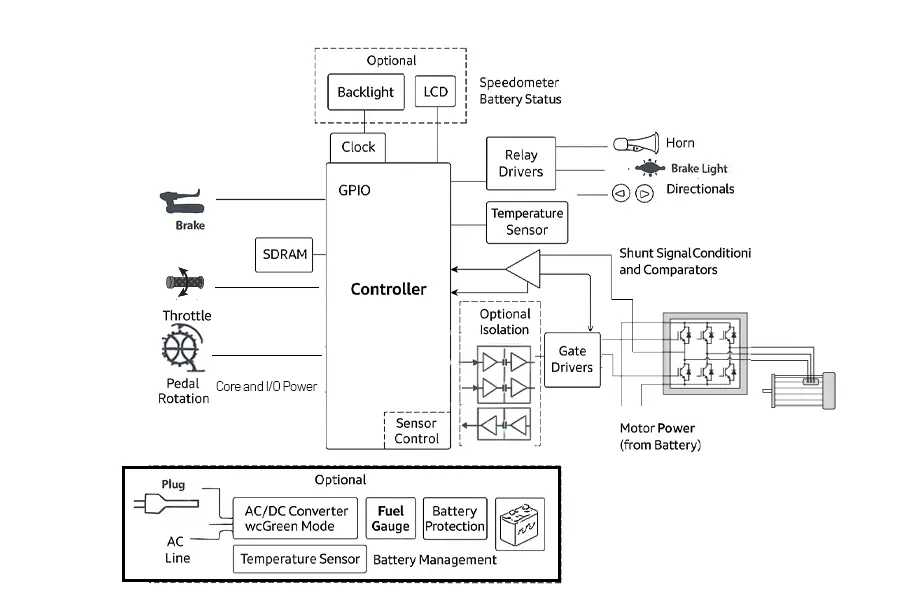
Figura 2: Diagrama de bloques de un sistema típico de control de bicicletas eléctricas y gestión de baterías. El controlador central interactúa con las entradas principales -acelerador, sensores de pedal, palancas de freno- y gestiona salidas como las señales de accionamiento del motor a través de controladores de puerta, controladores de relé y conexiones GPIO. Los módulos opcionales, como pantallas LCD, cargadores de baterías, indicadores de combustible y retroiluminación, amplían la funcionalidad del sistema. La comunicación entre los componentes permite coordinar en tiempo real la alimentación del motor, la iluminación, los cortes de seguridad y la supervisión del estado de la batería.
¿Qué son los protocolos de comunicación de las bicicletas eléctricas?
En el contexto de las e-bikes, los protocolos de comunicación se refieren al método y al formato mediante el cual los componentes electrónicos intercambian datos. Las primeras bicicletas eléctricas no solían tener una red digital compleja, sino que muchas señales eran analógicas o simples circuitos de encendido y apagado. Por ejemplo, un acelerador envía un voltaje analógico para indicar cuánta potencia desea el ciclista, y un interruptor de freno simplemente abre o cierra un circuito para cortar la potencia . Sin embargo, a medida que las bicicletas eléctricas se han vuelto más sofisticadas -con pantallas inteligentes, sensores avanzados e incluso GPS o integración de smartphones- ha surgido la necesidad de una comunicación digital más robusta.
En la actualidad, dos protocolos de comunicación digital dominan los sistemas de bicicletas eléctricas:
- UART (Receptor-Transmisor Asíncrono Universal): Método de comunicación en serie que crea un enlace de datos directo uno a uno entre dos dispositivos (normalmente el controlador y la pantalla).
- Bus CAN (Red de área de controlador): Un protocolo de red que permite que varios dispositivos (controlador, pantalla, BMS de batería, sensores, etc.) se comuniquen a través de los mismos cables de bus compartidos.
Además de UART y CAN Bus, otros dos protocolos de comunicación se utilizan ocasionalmente en los sistemas e-bike:
- SIF (Serial Interface Format): Se trata de un protocolo patentado o simplificado que suele encontrarse en determinados sistemas de marca (por ejemplo, Shimano STEPS o unidades de visualización más antiguas). Suele utilizarse para el intercambio de datos básicos entre el controlador y la pantalla o los botones remotos. Dado que SIF carece de estandarización abierta y flexibilidad, se limita principalmente a marcas específicas o modelos antiguos.
- RS-485 (Norma recomendada 485): RS-485 es un protocolo de comunicación serie industrial conocido por su fiabilidad a larga distancia y su resistencia al ruido. Aunque no es tan común como UART o CAN en las e-bikes de consumo, aparece en algunos sistemas de gama alta o de flotas comerciales, especialmente cuando se requiere robustez y un cableado prolongado, como en el caso de las bicicletas compartidas, las flotas de alquiler o las bicicletas eléctricas de uso intensivo.
Estos protocolos son esencialmente los "idiomas" de la electrónica de la e-bike. Si todos los componentes hablan el mismo idioma, la información fluye correctamente; si no, los dispositivos no se entienden entre sí. Por eso es fundamental que el protocolo coincida cuando se empareja una pantalla con un controlador, por ejemplo. Incluso si el enchufe encaja, una incompatibilidad en el protocolo significa que las piezas no funcionarán juntas .
Visión general del uso del mercado (tendencias estimadas para 2024-2025)
Aunque no existe un desglose universalmente publicado sobre el uso de protocolos en el mercado de las bicicletas eléctricas, basándonos en las opiniones de la industria y de los principales proveedores de sistemas (por ejemplo, Bosch, Bafang, Shimano, Mahle, etc.), a continuación se ofrece un resumen de los mismos. distribución estimada razonable a partir de 2025:
| Protocolo | Porcentaje de uso (estimado) | Aplicaciones comunes | Notas |
|---|---|---|---|
| UART | ~50-60% | Bicicletas eléctricas de gama básica y media | Muy utilizado por su sencillez y bajo coste |
| Bus CAN | ~30-35% | Bicicletas eléctricas de gama alta, inteligentes o modulares | Mayor adopción gracias a la integración inteligente |
| RS-485 | ~5-10% | Sistemas de flotas, instalaciones comerciales de cableado largo | Limitado a casos de uso específicos |
| SIF / Propietario | <5% | Sistemas específicos de la marca o heredados | Se encuentran sobre todo en ecosistemas antiguos o cerrados |
Nota: Estas cifras son generalizadas para todos los mercados mundiales (UE, NC, NA) y se basan en las tendencias de los fabricantes de equipos originales, documentación pública, datos de desmontaje e información de los proveedores de componentes.
Definir los protocolos de comunicación de E-Bike de forma más sencilla :
En términos sencillos, los protocolos de comunicación en las e-bikes son como Lenguajes o reglas que permiten a los distintos componentes electrónicos comunicarse entre sí.. Si los componentes no hablan el mismo idioma, no pueden entenderse, aunque el enchufe encaje físicamente.
📞 Analogía: Llamada uno a uno frente a chat en grupo
Imaginemos dos formas de comunicación en la vida cotidiana para entender los protocolos de las e-bikes:
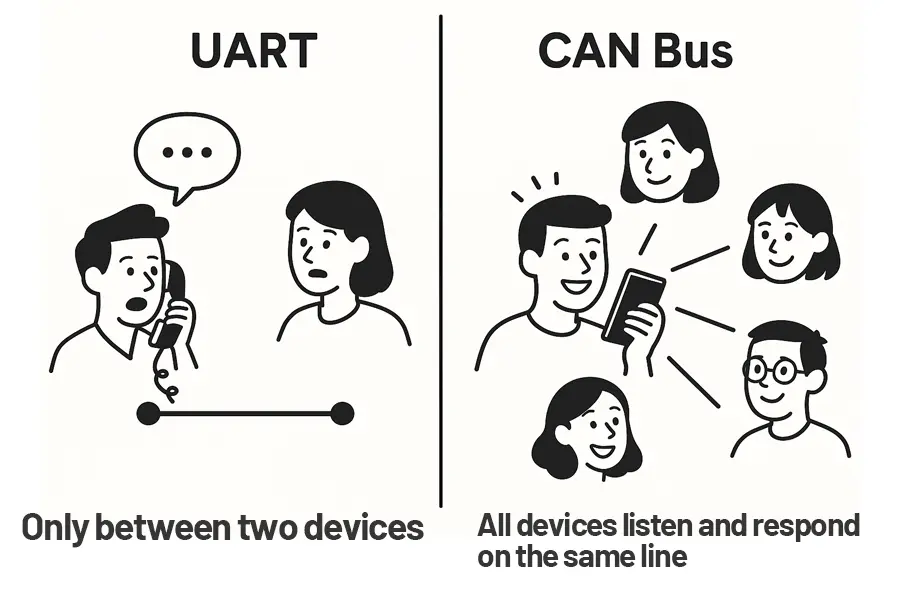
UART: como una llamada telefónica de tú a tú
- UART (Universal Asynchronous Receiver-Transmitter) es como llamar a un amigo por teléfono.
- Sólo dos dispositivos pueden hablar a la vez, como la pantalla y el mando.
- Si quieres hablar con otro dispositivo, necesitas otro cable (u otra llamada telefónica).
- Es sencillo, pero no escalable cuando tienes muchos dispositivos.
- Común en sistemas básicos de e-bike con funciones limitadas.
AN Bus: Como un chat de grupo
- El bus CAN (Controller Area Network) es como un chat de grupo en WhatsApp o WeChat.
- Todos los dispositivos (controlador, batería, pantalla, sensor, luces) están en la misma sala de chat.
- Cada mensaje se etiqueta con un identificador de remitente, y cada dispositivo lee sólo los mensajes destinados a él.
- Es mucho más eficiente e ideal cuando hay muchos componentes que deben trabajar juntos.
- Utilizado en sistemas inteligentes y avanzados para bicicletas eléctricasa menudo con GPS, Bluetooth e integración de aplicaciones.
| Característica | UART (Llamada telefónica) | CAN Bus (Chat en grupo) |
|---|---|---|
| Tipo de conexión | Uno a uno (punto a punto) | Uno a muchos (bus compartido) |
| Escalabilidad | Baja: necesita cables adicionales para más dispositivos | Alta: varios dispositivos comparten los mismos cables |
| Flujo de comunicación | Sólo entre dos dispositivos | Todos los dispositivos escuchan y responden en la misma línea |
| Complejidad | Simple | Más complejo pero potente |
| Caso de uso | Bicicletas eléctricas básicas (sólo pantalla ↔ mando) | Bicicletas eléctricas inteligentes con BMS, aplicación, sensores, etc. |
El papel de los protocolos de comunicación
Los protocolos de comunicación de las e-bikes tienen varias finalidades importantes:
- Intercambio de datos: Permiten al controlador enviar datos en tiempo real a la pantalla (velocidad, estado de carga de la batería, códigos de error) y recibir órdenes de vuelta (por ejemplo, cambiar el nivel de asistencia, encender o apagar las luces) . Sin un protocolo adecuado, es posible que no obtengas una lectura fiable de la velocidad o que no puedas ajustar la configuración.
- Coordinación de componentes: En los sistemas avanzados, varios microcontroladores necesitan coordinarse. Por ejemplo, una batería inteligente con su propio sistema de gestión de baterías (BMS) puede comunicarse con el controlador del motor para evitar sobrecorrientes o para mostrar el porcentaje exacto de la batería. Un bus CAN o una red similar permite que la batería, el controlador del motor, la pantalla e incluso los sensores compartan información en una red multinodo.
- Seguridad y fiabilidad: Un protocolo bien diseñado garantiza que, si se produce un fallo o una pérdida de señal (por ejemplo, si se daña un cable), el sistema pueda detectarlo y tomar medidas seguras (como cortar la alimentación del motor). Los protocolos robustos como CAN incluyen comprobación de errores y priorización de mensajes. Las señales analógicas más sencillas carecen de este tipo de gestión de errores: si un cable del acelerador se suelta, el controlador puede interpretar erróneamente el ruido como una señal de aceleración, a menos que existan medidas de seguridad.
- Capacidad de ampliación: En el caso de las bicicletas eléctricas con muchas funciones (rastreadores GPS, inmovilizadores antirrobo, múltiples sensores de asistencia, etc.), una red de comunicación facilita la adición o eliminación de dispositivos. En lugar de que cada nuevo dispositivo necesite un enlace de cableado dedicado al controlador, un dispositivo puede unirse al bus común y compartir datos con todos los demás. Esta escalabilidad es una de las principales razones por las que las modernas e-bikes de gama alta están evolucionando hacia el bus CAN.
En resumen, el protocolo de comunicación es la columna vertebral del sistema eléctrico de la e-bike, asegurando que todas las partes electrónicas funcionen en concierto. En otro post, nos sumergiremos en los dos tipos principales de protocolo (UART y CAN), examinando cómo funciona cada uno y sus respectivos casos de uso en e-bikes y bicicletas eléctricas de carga. compruébelo si le interesa:
- "UART en las bicicletas eléctricas: Cómo una simple comunicación en serie impulsa tu viaje"
- Una guía para principiantes sobre cómo UART permite el intercambio básico de datos entre componentes de e-bikes como pantallas y controladores.
- "¿Qué es el bus CAN en las bicicletas eléctricas? Una forma más inteligente de conectar baterías, sensores y mucho más"
- Descubra cómo las modernas bicicletas eléctricas utilizan el bus CAN para permitir la comunicación entre varios dispositivos, pantallas avanzadas y diagnósticos del sistema.
Escenarios de aplicación: ¿Qué protocolo de comunicación para cada bicicleta eléctrica?
Resulta útil entender cómo se eligen en la práctica UART y CAN para diferentes diseños de e-bikes. Consideraremos dos grandes categorías: bicicletas eléctricas de consumo (incluidas las típicas bicicletas de paseo o de ocio) y cargo/fleet e-bikes (a menudo utilizadas para entregas a empresas o por flotas de alquiler)y que a menudo tienen prioridades diferentes.

- Bicicletas eléctricas de consumo estándar (bicicletas eléctricas de ciudad, montaña y carretera): Son las motos que muchos particulares compran para uso personal. Las hay desde modelos básicos hasta modelos de gama muy alta. En el extremo inferior (modelos sensibles al coste), la comunicación UART es extremadamente común. Por ejemplo, una simple bicicleta eléctrica de 36V con un sensor de cadencia de pedaleo y una pantalla LED básica probablemente utiliza una UART (o incluso señales analógicas) entre el controlador y cualquier pantalla mínima que tenga. El objetivo aquí es rentabilidad y funcionalidad básica. Muchas de estas bicicletas utilizan controladores y pantallas ampliamente disponibles que se adhieren a un protocolo UART de facto, lo que significa que las marcas de bicicletas pueden abastecerse de componentes de diferentes fabricantes de equipos originales. Esto es atractivo para los compradores B2B que quieren flexibilidad para utilizar, por ejemplo, una pantalla más bonita del vendedor A con un controlador del vendedor B - siempre que ambos hablen UART en el mismo formato, puede funcionar (aunque uno debe verificar la compatibilidad en pinouts y firmware) . En las bicicletas de consumo de gama alta, especialmente las fabricadas por grandes marcas, hay una tendencia hacia el bus CAN. Las e-MTB de alto rendimiento o las e-road con sensores de par y pantallas de lujo pueden utilizar CAN para integrar todo sin problemas. Sin embargo, algunas marcas siguen utilizando UART u otros enlaces serie propietarios incluso en bicicletas de gama alta; varía según el fabricante y su filosofía de diseño.

- E-Bikes de carga y flotas comerciales: Las e-bikes de carga están diseñadas para transportar cargas pesadas o pasajeros y suelen ser utilizadas por empresas (servicios de reparto, bicicletas postales, etc.). Estas bicicletas suelen dar prioridad a robustez, seguridad y capacidad de gestión de flotas sobre el coste de la electrónica. Es en este segmento donde el bus CAN ha ganado realmente terreno. Por ejemplo, las motos de carga pueden tener baterías dobles para ampliar la autonomía - la gestión de dos baterías requiere comunicación para equilibrar la descarga o, al menos, para informar del estado de cada una. CAN facilita la comunicación entre un controlador y dos unidades BMS (una en cada batería) en el mismo bus. Las bicicletas de carga también pueden tener accesorios adicionales: luces de freno, intermitentes, incluso cerraduras electrónicas; coordinarlos a través de un bus central simplifica el cableado y el control. Además, como las e-bikes de carga suelen operar en flotas, a las empresas les gusta tener telemática en ellas: Rastreadores GPS que pueden informar de la ubicación de la moto, su uso y cualquier fallo. Con un sistema habilitado para CAN, un módulo telemático puede simplemente escuchar los mensajes CAN de velocidad, estado de la batería, etc., y cargar esa información. De hecho, un estudio de caso con una flota de reparto europea demostró que la conexión al bus CAN permitía controlar a distancia los datos de mantenimiento (como el kilometraje), desactivar el motor a distancia para evitar robos y actualizar el firmware de la moto, funciones muy útiles para la gestión de flotas. Esto sería muy complicado de implementar en una moto basada en UART.
- Sistemas mixtos frente a sistemas integrados: Si una marca de e-bikes quiere tener la libertad de mezclar componentes o permitir actualizaciones posventa, tiende a ceñirse a los sistemas basados en UART. Hemos visto que Los sistemas UART permiten intercambiar pantallas o ajustar la configuración del motor con facilidad.. Una empresa de bicicletas eléctricas más pequeña podría preferir esta vía para evitar estar atada a un único proveedor: pueden cambiar de proveedor de motor/controlador sin cambiar todo el ecosistema, siempre que el protocolo siga siendo UART y puedan adaptar el firmware. Por otro lado, las marcas centradas en la optimización de sistemas y el cumplimiento de normativas suelen optar por CAN. Por ejemplo, las bicicletas eléctricas de Bosch utilizan un bus de tipo CAN (Bosch tiene un protocolo propio basado en CAN) que conecta el motor, la pantalla y la batería. De este modo se garantiza que ninguna pieza de terceros pueda interferir. La ventaja es una fiabilidad y seguridad excelentes: el sistema emite un mensaje de error si algo se sale de las especificaciones. La desventaja es que, como comprador B2B (como un fabricante de bicicletas que elige Bosch), te comprometes a comprar el motor, el controlador, la batería, la pantalla todo de Bosch como paquete.
- Bicicletas de carga - Consideraciones específicas: Las bicicletas de carga, sobre todo en la UE, suelen someterse a un escrutinio más estricto porque pueden transportar cargas más pesadas o incluso pasajeros. En Alemania, por ejemplo, existe una norma (DIN 79010) específica para la seguridad de las bicicletas de carga (sobre todo aspectos mecánicos como la resistencia del cuadro y el frenado). Aunque esa norma no dicta protocolos de comunicación, la la seguridad ante todo en bicicletas de carga anima a utilizar un protocolo que garantice, por ejemplo, que si algo va mal (sobrecalentamiento del motor o batería baja), el sistema pueda comunicarlo y tomar medidas. La robustez y la gestión de errores de CAN contribuyen a alcanzar estos objetivos de seguridad. Además, las e-bikes de carga operan a menudo en entornos urbanos (reparto en ciudades) donde hay mucho ruido radioeléctrico y es mucho lo que está en juego si se produce un error de comunicación en el momento equivocado. El sitio inmunidad al ruido de CAN es una gran ventaja en este caso, ya que evita la falta de comunicación que podría conducir a un comportamiento errático.


Normas de seguridad y conformidad del sistema eléctrico (UE/EE.UU.)
Independientemente del protocolo de comunicación utilizado, los sistemas eléctricos de las bicicletas eléctricas deben cumplir las normas de seguridad para garantizar su funcionamiento seguro y legal, especialmente en mercados clave como Europa y Estados Unidos. El protocolo de comunicación puede afectar indirectamente a la conformidad de una bicicleta; por ejemplo, un protocolo que permita modificaciones sin restricciones por parte del usuario puede suponer un riesgo de conformidad, mientras que uno que esté bloqueado puede ayudar a garantizar que la bicicleta se mantenga dentro de los límites legales. Desglosemos las normas pertinentes y su relación:
Cómo afectan los protocolos de comunicación a la conformidad de las ebike en la Unión Europea
Unión Europea (UE) - EN 15194: En la UE, la mayoría de las e-bikes (bicicletas de pedaleo asistido con potencia de motor <= 250W y corte de asistencia a 25 km/h) se clasifican como EPACs (Ciclos asistidos electrónicamente). La norma EN 15194 se aplica a las EPAC y define los requisitos y métodos de ensayo para la seguridad y el rendimiento . Esto incluye la seguridad mecánica (frenos, cuadro, etc.) y eléctrica (cableado, CEM, etc.), así como garantizar que la bicicleta cumple los límites de velocidad y potencia.
- Para los protocolos de comunicación, un aspecto relevante es compatibilidad electromagnética (CEM)el sistema no debe emitir interferencias excesivas ni verse afectado indebidamente por ellas. Una línea de comunicación CAN o UART bien diseñada debe superar las pruebas de CEM (EN 15194 hace referencia a EN 55014 o similar para CEM). La dirección resistencia al ruido de CAN puede ser una ventaja a la hora de cumplir estos requisitos de EMC, ya que intrínsecamente trata mejor el ruido, pero los sistemas UART también pueden cumplirlos si están debidamente blindados.
- Manipulación de velocidad y potencia: La norma EN 15194 exige que la asistencia se corte a 25 km/h y que el usuario no pueda ajustar fácilmente este límite por encima del valor legal. Si una bicicleta utiliza UART y el fabricante deja accesibles los pads de programación, un usuario podría potencialmente deslimitarla, lo que podría plantear problemas de cumplimiento. Por ello, algunos fabricantes utilizan sistemas CAN bloqueados específicamente para evitar que los usuarios cambien el límite de velocidad. Por ejemplo, los motores basados en CAN de Bafang tienen el límite de velocidad fijo y no modificable a través de la pantalla, lo que ayuda a garantizar el cumplimiento de la normativa desde el primer momento. En cambio, en muchos sistemas UART, un usuario avispado podría entrar en el modo de configuración de la pantalla y modificar el tamaño o el límite de la rueda, o utilizar un cable de programación, lo que podría infringir la ley si hace que la moto supere los 25 km/h de asistencia.
- Seguridad eléctrica: La norma EN 15194 (últimas revisiones) cubre la seguridad eléctrica básica pero, curiosamente no cubre totalmente la seguridad de la batería - supone que el propio pack de baterías debe cumplir otras normas. Se centra más en la integración, el cableado y la protección básica (como la ausencia de partes activas expuestas, etc.). Un protocolo de comunicación no afecta directamente a esto, pero indirectamente, un protocolo como CAN que permite al BMS hablar con el controlador puede mejorar la seguridad; por ejemplo, el BMS puede enviar una orden de "detener descarga" si la batería se está sobrecalentando. Aunque la norma EN 15194 no lo exige, este tipo de función ayuda a una bicicleta a cumplir las expectativas generales de seguridad (evitar eventos de fuga térmica).
Además, las bicicletas eléctricas de carga europeas (especialmente las que transportan mercancías/pasajeros) podrían tener que cumplir la Directiva sobre máquinas si no se rigen estrictamente por la normativa sobre bicicletas (algunas bicicletas de carga pesada sí lo hacen). También en este caso se hace hincapié en los sistemas de seguridad sólidos. El uso de un protocolo de comunicación sólido con un comportamiento a prueba de fallos (como la desconexión CAN en caso de fallo) puede ayudar a cumplir las normas.
Más información Norma europea sobre bicicletas eléctricas
Cómo afectan los protocolos de comunicación al cumplimiento de la normativa sobre bicicletas eléctricas en Estados Unidos
Estados Unidos - UL 2849 y otros: En los EE.UU., la fabricación de bicicletas eléctricas está un poco menos regulada a nivel federal en cuanto a rendimiento (existe una definición de producto de consumo de una bicicleta eléctrica de baja velocidad como 750W máx. y 20 mph con acelerador/28 mph con pedaleo asistido, pero no hay normas de construcción obligatorias a nivel federal). No obstante, la certificación de seguridad es cada vez más importantesobre todo por el riesgo de incendio de las baterías.
- UL 2849 es la principal norma de seguridad para los sistemas eléctricos de las bicicletas eléctricas en Norteamérica. Abarca todo el sistema de accionamiento eléctrico de una bicicleta eléctrica, incluida la batería, el motor, el cargador y todas las interconexiones. Las pruebas UL 2849 examinan aspectos como si el cableado puede soportar las corrientes, si el sistema está protegido contra cortocircuitos y, lo que es más importante, también incorpora UL 2271 para baterías (que es una norma de seguridad específica para baterías). En cuanto a la comunicación, la norma UL 2849 no prescribe un protocolo, pero comprobará que, por ejemplo, si se pierde la comunicación o se detecta un fallo, el sistema falle de forma segura (sin eventos térmicos, sin motor fuera de control). Un sistema basado en CAN podría tener una ligera ventaja a la hora de probar la redundancia (por ejemplo, si se pierde el mensaje del acelerador, CAN puede detectarlo y temporizarlo adecuadamente). Pero incluso los sistemas UART pueden diseñarse para cumplir la norma UL 2849 (sólo necesitan una gestión exhaustiva de los fallos en el firmware del controlador).
- Prevención de incendios y descargas eléctricas: Normas como la UL 2849 se centran en la prevención de incendios y descargas eléctricas. Por ejemplo, si una e-bike tiene un cargador conectado, la comunicación entre la batería y el cargador (si existe) no debe provocar una sobrecarga. En particular, la Norma EnergyBus que hemos mencionado, que está basado en CAN, se debe en parte a la seguridad, ya que garantiza que cualquier cargador pueda cargar cualquier batería de forma segura comunicándose a través de CANopen y sólo permitiendo la alimentación cuando se realiza el handshaking adecuado. EnergyBus utiliza un conector específico que incluye líneas de datos CAN para que el cargador y la batería establezcan primero la comunicación y, a continuación, permitan la corriente de carga, con el fin de evitar chispas o tensiones desajustadas. Este concepto se alinea bien con la lógica de seguridad UL. Si una marca utiliza EnergyBus, es probable que le ayude a superar las certificaciones de seguridad, ya que gestiona de forma inherente las interacciones seguras entre los componentes.
- Cumplimiento de la normativa (velocidad/potencia): En EE.UU., el sistema de clases (bicicletas eléctricas de clase 1, 2 y 3) es en gran medida un sistema de honor y no se aplica tan estrictamente como los límites de la UE, pero por razones de responsabilidad, los fabricantes suelen asegurarse de que una bicicleta eléctrica vendida como de clase 2 no pueda alterarse fácilmente para superar las 20 mph con el acelerador, por ejemplo. Una vez más, el uso de un protocolo CAN cerrado puede ayudar: los usuarios no pueden simplemente enchufar un cable y anular la restricción de la bicicleta. Cabe destacar que muchas empresas de bicicletas eléctricas anuncian ahora baterías o sistemas con certificación UL para garantizar la seguridad de sus clientes. Por ejemplo, HOVSCO (como se puede ver en su base de conocimientos) hace hincapié en que sus bicicletas cumplen con UL 2849 para la seguridad eléctrica y EN 15194 para el cumplimiento de la seguridad en general . Esto significa que el cableado, los conectores y las comunicaciones deben funcionar sin causar riesgos.
Normas internacionales y otras normas: Además de las normas EN 15194 y UL 2849, existen otras normas pertinentes, por ejemplo, ISO 4210 (norma de seguridad para bicicletas) con una parte que cubre los requisitos de las e-bikes, y la alemana DIN 79010 para bicicletas de carga (que, como hemos señalado, cubre aspectos como la resistencia del cuadro bajo cargas de carga y las prestaciones de frenado). Estos aspectos no afectan directamente a la electrónica, pero una norma para bicicletas de carga podría exigir implícitamente que, por ejemplo, la asistencia no funcione mal con cargas pesadas. Una comunicación robusta garantiza que, aunque la bicicleta esté sometida a esfuerzos (y tal vez aumente el ruido eléctrico o se hunda la batería), las señales entre la batería, el controlador y los sensores sigan siendo fiables.
En resumen, la conformidad y la seguridad determinan algunas decisiones de diseño entre UART y CAN. Un fabricante que busque la máxima seguridad puede inclinarse por CAN por su control y comprobación de errores, o aplicar salvaguardas adicionales a los sistemas UART. Ambos protocolos pueden formar parte de un diseño seguro, pero la clave está en cómo se utilizan. En La naturaleza cerrada de los sistemas CAN puede imponer su cumplimiento (por ejemplo, límites de velocidad no ajustables por los usuarios, como exige la ley) , mientras que Los sistemas UART ofrecen más libertad al usuario, lo que es un arma de doble filo. Los fabricantes deben asegurarse de que incluso las motos basadas en UART tengan elementos como un limitador físico o de software que no pueda piratearse fácilmente, para mantenerse dentro de los límites legales.
Por último, independientemente del protocolo, el uso de conectores y cableado de calidad forma parte de la conformidad. En la UE, la bicicleta debe soportar vibraciones sin que se suelten los cables, y en condiciones de humedad sin cortocircuitos. Los conectores como Higo/Julet (resistentes al agua y muy utilizados en bicicletas eléctricas) son muy populares no sólo por su comodidad, sino también porque ayudan a cumplir las normas. Clasificación IP y requisitos de fiabilidad. Un bus CAN suele utilizar este tipo de conectores (por ejemplo, un único conector Higo de 4 ó 5 patillas puede transportar los datos CAN y la alimentación de una pantalla). La elección del protocolo no cambia la necesidad de un buen alivio de tensión, aislamiento y conectores de bloqueo para evitar desconexiones (que podrían ser peligrosas si, por ejemplo, la señal de corte del freno no llegara al controlador porque un cable se soltara).
Para concluir esta sección, tanto Europa como EE.UU. se centran ahora en la seguridad de las bicicletas eléctricas. El cumplimiento de normas como EN 15194 y UL 2849 es cada vez más innegociable para las marcas de renombre. El protocolo de comunicación es una pieza del rompecabezas: un medio para garantizar que el sistema eléctrico esté coordinado y sea a prueba de fallos. La fiabilidad del bus CAN puede ayudar a cumplir estas normas al proporcionar una comunicación robusta, mientras que los sistemas UART requieren un diseño cuidadoso para ser igual de seguros. Los fabricantes suelen elegir el protocolo que mejor se adapte a la estrategia de cumplimiento: UART para diseños más sencillos en los que el riesgo puede gestionarse fácilmente, o CAN para sistemas complejos en los que destacan sus características de seguridad.
Costes y consideraciones de mercado al elegir los protocolos de comunicación
A la hora de decidir entre protocolos de comunicación (o, en general, de diseñar el sistema eléctrico de una e-bike), el coste es un factor importante: no sólo el coste monetario, sino también el "coste" en términos de flexibilidad y relaciones con los proveedores. He aquí cómo se comparan los costes y qué tienen en cuenta los compradores o ingenieros de B2B:
- Coste del hardware: Como ya se ha indicado, un sistema basado en UART suele utilizar un hardware más sencillo. El controlador y la pantalla sólo necesitan la capacidad UART, que prácticamente todos los microcontroladores tienen incorporada. El cableado puede ser un poco más sencillo (menos consideraciones de terminación, etc.). Un sistema basado en CAN requiere algo más: un chip transceptor CAN para cada dispositivo y, posiblemente, una MCU más potente (aunque hoy en día incluso las MCU más baratas llevan CAN integrado). La diferencia real en la lista de materiales puede ser del orden de unos pocos dólares por moto en grandes volúmenes, pero en un mercado competitivo sigue siendo importante. Para una gran flota de bicicletas, esos dólares se multiplican. Dicho esto, la el coste del hardware CAN ha bajado de forma significativa, y la compensación podría justificarse fácilmente por la funcionalidad añadida que proporciona CAN.
- Coste de desarrollo e integración: Para una nueva empresa de bicicletas eléctricas o una empresa pequeña, desarrollar un sistema basado en CAN desde cero puede resultar costoso si no se dispone de experiencia interna. Podría implicar contratar a ingenieros de sistemas integrados familiarizados con CAN, invertir en herramientas y dedicar tiempo a desarrollar un firmware personalizado. Alternativamente, si compran un sistema ya hecho (como las unidades de accionamiento Bosch o Shimano, que están basadas en CAN), el coste de desarrollo por su parte es menor, pero el coste unitario es mayor (los sistemas Bosch tienen un precio superior, en parte porque se obtiene una solución totalmente integrada y el nombre de la marca). A El sistema UART puede montarse a menudo con componentes estándar. con compatibilidad conocida: por ejemplo, muchas empresas utilizan protocolos de código abierto o estándar en los que gran parte de la ingeniería ya está hecha y el riesgo es menor. Para un comprador B2B (por ejemplo, una empresa que quiere un montón de e-bikes bajo su marca), optar por UART podría significar que pueden obtener piezas genéricas más baratas, mientras que optar por CAN a menudo significa alinearse con el ecosistema de un proveedor en particular (que podría cobrar licencias o precios más altos).
- Costes de postventa y mantenimiento: Esto a veces se pasa por alto. Un operador de flotas (como un servicio de bicicletas compartidas o una empresa de reparto) puede considerar que Las bicicletas con bus CAN ahorran dinero en mantenimiento. ¿Por qué? Porque pueden diagnosticar los problemas a distancia o con mayor rapidez. Un sistema conectado a CAN puede informar detalladamente de los códigos de error (por ejemplo, "fallo del sensor de temperatura de la batería #2" como código específico). Los técnicos pueden conectar herramientas de diagnóstico al bus CAN para localizar los problemas. Esto puede reducir el tiempo de trabajo. Además, como se ha visto en el caso de IoT Venture, es posible realizar actualizaciones remotas de firmware, lo que puede ahorrar el coste de llamar físicamente a las motos para determinadas reparaciones. Por otro lado, el mantenimiento inicial de una bicicleta UART puede ser más sencillo (quizás haya menos cosas que fallen en las comunicaciones), pero si algo va mal, es posible que tengas que hacer cambios de piezas por ensayo y error, ya que el sistema no puede decirte exactamente qué va mal más allá de que parpadee un LED. Para un consumidor particular, una bicicleta UART puede ser más barata de reparar porque puede utilizar piezas estándar y los conocimientos de la comunidad para arreglarla, mientras que una bicicleta CAN puede obligarle a acudir a un servicio técnico autorizado (potencialmente más caro). Por tanto, hay un equilibrio de costes entre facilidad de uso (UART gana) y apoyo diagnóstico avanzado (CAN gana, lo que podría reducir los costes de los servicios profesionales).
- Licencias y costes de propiedad: El uso de un protocolo CAN patentado podría conllevar derechos de licencia o restricciones. Si una marca de bicicletas desarrolla su propio protocolo CAN, no hay problema, pero si utiliza algo como CANopen o EnergyBus, es posible que tenga que adherirse a estándares y posiblemente unirse a asociaciones (por ejemplo, EnergyBus e.V.). Estos costes suelen ser pequeños, pero hay que tenerlos en cuenta. Los sistemas propietarios, como los de Bosch, significan que el fabricante de la bicicleta compra las unidades de accionamiento como un paquete y Bosch fija el precio. Con los sistemas UART, suele haber más competencia entre los proveedores de piezas, lo que puede bajar los precios.
- Percepción y valor para el cliente: Desde el punto de vista del marketing, una marca puede justificar un precio más alto por una moto que tenga "electrónica de bus CAN de calidad automovilística", ya que suena avanzado y fiable (aunque el cliente no perciba directamente la diferencia). Hay valor en la tacto y rendimiento premium que suelen llevar los sistemas CAN (suelen estar en motos que también tienen motores de alta calidad, etc.). Así, las marcas que se dirigen al mercado de gama alta o a clientes comerciales pueden aprovechar el CAN como parte de una oferta premium. Por el contrario, en el caso de las bicicletas eléctricas de gama básica, a los clientes les importa sobre todo que funcione y que sea asequible: no pagarán más porque la pantalla de la bicicleta utilice CAN en lugar de UART. Así pues, la elección del protocolo debe ajustarse al segmento de mercado de la bicicleta.
- A prueba de futuro: Un coste que los ingenieros tienen en cuenta es el coste de oportunidad de no estar preparado para el futuro. Si ahora inviertes en una plataforma basada en UART, pero el año que viene quieres añadir más funciones (por ejemplo, una segunda batería o un nuevo tipo de sensor), es posible que la antigua plataforma te limite y te obligue a rediseñarla. Algunas empresas deciden que, a largo plazo, es más rentable optar por CAN desde el principio, aunque no se utilice del todo, para dejar margen para nuevas funciones y accesorios. Esto puede ahorrar costes de rediseño en el futuro. Se trata de una decisión estratégica: pagar un poco más por adelantado frente a la posibilidad de pagar mucho más por la actualización.
En cuanto a las cifras de precios reales: es difícil de precisar, pero un conocedor del sector podría decir, por ejemplo, que un conjunto básico de controlador UART + pantalla para e-bike podría costar, digamos, $50-$100 al por mayor, mientras que un conjunto equivalente basado en CAN de una gran marca podría costar unos cientos de dólares (porque es más sofisticado). Sin embargo, esa diferencia a menudo también incluye un mejor rendimiento del motor, garantía, etc., no sólo la diferencia de comunicación. El sitio coste incremental exclusivamente para el protocolo (por ejemplo, añadiendo un chip CAN) es pequeña, pero la coste del ecosistema (vincularse a un sistema caro frente a uno genérico barato) puede ser grande.
Dicho claramente para un comprador B2B de bicicletas eléctricas:
- Si su prioridad es menor coste unitario y desea flexibilidad para abastecerse de varios proveedores, un Sistema abierto basado en UART es atractivo. Puedes buscar pantallas y controladores que encajen, e incluso negociar con varias fábricas.
- Si su prioridad es rendimiento, fiabilidad y un sistema llave en mano (y está dispuesto a pagar por ello), un Sistema basado en CAN de un proveedor de confianza puede ahorrarle quebraderos de cabeza y añadir valor a su producto (a un coste más elevado, que con suerte recuperará fijando un precio más alto para sus bicicletas o mediante eficiencias de volumen).
Limitaciones y tendencias futuras
Incluso mientras ensalzamos las virtudes de UART y CAN, merece la pena señalar la limitaciones del estado actual de las comunicaciones de las e-bikes y hacia dónde podrían dirigirse las cosas:
- Falta de normalización en todo el sector: A diferencia del mundo del automóvil, donde casi todos los coches utilizan el bus CAN y un sistema de diagnóstico estandarizado (OBD-II), el sector de las e-bikes sigue fragmentado. Hay no existe un único protocolo universal que utilizan todas las e-bikes. Las implementaciones UART varían (cada fabricante puede tener diferentes formatos de datos a través de UART), y las implementaciones CAN son a menudo propietarias. Esto es una limitación para los consumidores y los ensambladores de bicicletas - no es "plug and play" entre diferentes marcas. No puedes coger una pantalla cualquiera y esperar que funcione con un controlador cualquiera a menos que utilicen explícitamente el mismo protocolo y firmware. EnergyBus es un esfuerzo prometedor de normalización (con CANopen CiA-454, que define los mensajes para los componentes de las bicicletas eléctricas), pero aún no está generalizado. Si EnergyBus o normas similares ganan terreno, podríamos ver componentes realmente interoperables: por ejemplo, una batería del fabricante X podría utilizarse con un sistema de motor del fabricante Y, y el protocolo basado en CANopen garantizaría que se entienden entre sí. Esto beneficiaría a los compradores B2B (más opciones de proveedores) y a los consumidores (más opciones de actualización/reparación). Sin embargo, las empresas del sector también tienen motivaciones comerciales para mantener sistemas patentados (para fidelizar a los clientes). La tensión entre normalización frente a control propietario marcará el futuro de los protocolos de las bicicletas eléctricas.
- Ancho de banda y necesidades de datos: En la actualidad, las comunicaciones de las bicicletas eléctricas son de datos relativamente bajos. Pero las futuras e-bikes podrían transmitir más información: imagina recoger datos de alta frecuencia de sensores de par, o métricas de potencia de alta resolución para fines de entrenamiento, o incluso vídeo de cámaras para la seguridad. CAN a velocidades clásicas podría convertirse en un cuello de botella si hay que enviar muchos datos. La industria automovilística dispone de CAN-FD (una versión ampliada de CAN con tramas de datos más grandes y mayor rendimiento) y otros protocolos como Ethernet para necesidades de gran ancho de banda. En el caso de las e-bikes, CAN-FD podría aparecer si fuera necesario, o BLE/Wi-Fi para descargar los registros de datos. Comunicación inalámbrica también podría complementar los protocolos por cable: muchas bicicletas eléctricas ya utilizan Bluetooth Low Energy para conectar la bicicleta a una aplicación de smartphone. Esto queda fuera del alcance del sistema eléctrico interno, pero merece la pena tenerlo en cuenta como canal paralelo. Tal vez en el futuro, algunas bicicletas eléctricas más sencillas podrían incluso renunciar a una pantalla por cable y utilizar un módulo inalámbrico a un teléfono, aunque el control crítico (como las señales del acelerador o el freno) probablemente seguiría estando conectado por cable para mayor fiabilidad. En las flotas de carga, podríamos ver una mayor integración de la comunicación V2X (vehículo-a-todo): las e-bikes hablarían con los sistemas logísticos o la infraestructura de tráfico, que de nuevo se superpondrían al sistema central de bus CAN.
- Cuestiones de seguridad: A medida que las e-bikes se conectan y utilizan comunicaciones más complejas, ciberseguridad se convierte en un problema. Un sistema UART sin conectividad externa es prácticamente inmune a la piratería informática (alguien tendría que pinchar físicamente los cables). Pero un bus CAN que interactúe con un módulo Bluetooth o un módulo GSM (para el seguimiento de flotas) introduce vulnerabilidades potenciales. Los fabricantes tendrán que asegurarse de que sus protocolos (especialmente las interfaces inalámbricas con el bus) sean seguros para evitar un control malintencionado (imaginemos un pirateo informático que pudiera inutilizar a distancia una flota de bicicletas de reparto, una hipótesis descabellada pero teóricamente posible si no está protegida). Los protocolos propietarios son, por naturaleza, algo seguro a través de la oscuridad, pero a medida que CAN se convierte en algo común en las e-bikes, los malos actores podrían intentar inyectar mensajes CAN a través de un puerto expuesto. Por tanto, es posible que en el futuro veamos más encriptación o autenticación en las comunicaciones de las bicicletas eléctricas.
- Experiencia del usuario: En última instancia, sea cual sea el protocolo utilizado, debe ofrecer una buena experiencia al usuario. A los motoristas les importan cosas como una entrega de potencia fluida, información precisa en la pantalla y que las funciones de seguridad funcionen cuando sea necesario. Una limitación de los primeros sistemas basados en CAN era que a veces demasiado Los usuarios se sentían frustrados porque ni siquiera podían cambiar sus preferencias. A medida que los sistemas maduren, los fabricantes podrían encontrar formas de dar flexibilidad a los usuarios (mediante aplicaciones o ajustes autorizados) sin comprometer el control. Por ejemplo, tal vez una aplicación podría permitir un ajuste limitado (dentro de límites seguros) incluso en un sistema CAN, o permitir que accesorios de terceros que estén certificados se comuniquen en el bus (tal vez utilizando mensajes estándar EnergyBus). Podemos esperar un poco más de apertura a medida que se estandaricen los protocolos, irónicamente incluso en un mundo CAN.
Para terminar, el el sistema de comunicación eléctrica de las e-bikes -ya sea UART o CAN- es crucial para el rendimiento, la seguridad y la modularidad de la bicicleta. Los ingenieros que diseñan e-bikes deben sopesar la simplicidad de UART frente a la sofisticación de CAN. Los compradores B2B deben considerar cómo afecta la elección al coste, la cadena de suministro y la propuesta de valor de su producto. La industria parece tender hacia el bus CAN a medida que las e-bikes evolucionan hacia máquinas más conectadas y capaces, pero es probable que los sistemas basados en UART sigan en paralelo para modelos más sencillos y de menor coste durante algún tiempo (después de todo, son "suficientemente buenos" para un enorme segmento de ciclistas).
Al comprender estos protocolos de comunicación -esencialmente los lenguaje eléctrico de las bicicletas eléctricas, se aprecia mucho mejor el funcionamiento interno de una bicicleta eléctrica. Desde el giro del acelerador o la presión sobre el pedal, hasta el impulso del motor y los números que aparecen en la pantalla, todo está controlado por bits y bytes que se mueven a lo largo de cables y garantizan que la bicicleta eléctrica funcione correctamente. la batería, el motor y el piloto están sincronizados. Y tanto si se trata de una elegante bicicleta eléctrica de ciudad como de un pesado vehículo de transporte de mercancías, esa armonía es lo que hace que el viaje resulte seguro y sin esfuerzo. Al final, el objetivo de cualquier protocolo es hacer que la tecnología pase a un segundo plano para que los ciclistas puedan simplemente disfrutar del viaje, pero ahora, esperemos, con un poco de conocimiento de la impresionante coordinación electrónica que tiene lugar bajo sus pies.
Fuentes:
- Guía Qiolor Ebike - "Cómo elegir una pantalla compatible para el mando de tu ebike" (2025) - debate sobre los lenguajes UART vs CANBUS y la importancia de que los protocolos coincidan.
- Velco.tech - "CAN vs UART: diferencias entre los modos de comunicación" (2024) - explicar la simplicidad de UART frente a las capacidades de red de CAN y enumerar sus ventajas/limitaciones .
- Centro de ayuda de Biktrix - "¿Qué son los protocolos CANBUS y UART?" - visión centrada en el usuario sobre cómo CAN bloquea los ajustes (límite de velocidad fijo) vs UART permite modificaciones , además de una comparación de la intercambiabilidad de la pantalla .
- IoT Venture (estudio de caso con la flota CYCLE): descripción de las ventajas de la integración CAN en las flotas de bicicletas eléctricas: acceso a datos de mantenimiento, desactivación remota del motor, actualizaciones OTA...
- HOVSCO Conocimientos - "¿Qué características de seguridad tienen las bicicletas eléctricas?" - notas sobre la norma EN 15194 (UE), que garantiza los límites de velocidad/potencia y la durabilidad, y la norma UL 2849 (EE.UU.), centrada en la seguridad eléctrica/contra incendios , así como mención de la norma DIN 79010 para la seguridad de las bicicletas de carga .
- Texas Instruments App Note - "Consideraciones sobre el diseño de hardware para una bicicleta eléctrica con motor BLDC" - proporcionó diagramas de bloques típicos de sistemas de bicicletas eléctricas y una visión de la electrónica de control .
- Letrigo Ebike Conocimientos - "Explicación del cableado de la pantalla de la e-bici" - detalla el cableado y los conectores (Higo/Julet) y advierte de que no existe una norma universal para el cableado, por lo que insiste en el correcto emparejamiento de las conexiones y en un cableado robusto que garantice la integridad de la señal .
- Estándar EnergyBus - Introducción de Kvaser - describe EnergyBus como un estándar abierto basado en CANopen para componentes LEV que garantiza la compatibilidad y seguridad entre fabricantes .




