
Rowery elektryczne (e-rowery), w tym rowery cargo, opierają się na skomplikowanym systemie elektrycznym łączącym akumulator, silnik, kontroler, czujniki i interfejs użytkownika. Protokoły komunikacyjne tego systemu służą jako "język", który umożliwia płynną koordynację wszystkich tych komponentów. W tym popularnonaukowym przeglądzie wyjaśnimy, czym są te protokoły komunikacyjne i jak funkcjonują w systemach elektrycznych rowerów elektrycznych. Omówimy rodzaje stosowanych protokołów, różnice między nimi, zastosowanie każdego z nich, ich wady i zalety, koszty, zgodność z normami bezpieczeństwa w UE i USA oraz ograniczenia. Celem jest zapewnienie jasnego, autorytatywnego przewodnika dla naszych klientów i odbiorców, równoważącego głębię techniczną z praktycznym zrozumieniem.
Kluczowe komponenty roweru elektrycznego - "układ nerwowy"
O rowerach elektrycznych można myśleć jak o centralnym układzie nerwowym z przewodami i łączami danych, które łączą wszystkie krytyczne komponenty. Podobnie jak nerwy przenoszą sygnały w ciele, wiązka przewodów przenosi zarówno sygnały mocy, jak i danych w całym rowerze. Kluczowe elementy typowego układu elektrycznego roweru elektrycznego obejmują:

- Akumulator: Źródło zasilania prądem stałym (zwykle 36-48 V), które dostarcza energię do systemu. Łączy się z kontrolerem za pomocą grubych kabli zasilających (z bezpiecznikami lub wyłącznikami dla bezpieczeństwa) w celu dostarczenia głównego prądu. Niektóre zaawansowane akumulatory mają również łącze danych (za pośrednictwem linii komunikacyjnych) do udostępniania stanu lub sygnałów sterujących kontrolerowi.
- Silnik i sterownik: Silnik (silnik piasty w kole lub napęd środkowy przy korbie) otrzymuje moc ze sterownika silnika, który jest "mózgiem" regulującym moc wyjściową silnika w oparciu o dane wejściowe kierowcy i informacje zwrotne z czujników. Sterownik jest jednostką elektroniczną z mikroprocesorem, który odbiera sygnały (przepustnica, czujnik pedału, hamulce itp.) i zarządza zasilaniem silnika. Silniki zazwyczaj mają przewody fazowe (ciężkie kable przenoszące moc) i przewody czujników (cienkie kable z czujników Halla zapewniające sprzężenie zwrotne położenia wirnika) prowadzące do sterownika.
- Interfejs użytkownika (przepustnica, czujnik pedałowania, wyświetlacz): Rowerzysta komunikuje się z rowerem elektrycznym za pośrednictwem urządzeń takich jak przepustnica (często jest to uchwyt na kierownicy z czujnikiem Halla, który wysyła zmienny sygnał napięcia w celu żądania prędkości) oraz czujnik wspomagania pedałowania (PAS), który wykrywa ruch pedałowania za pomocą magnesów i czujników. Wyświetlacz na kierownicy pokazuje prędkość, poziom naładowania baterii, poziom wspomagania itp. i często zawiera przyciski umożliwiające rowerzyście dostosowanie ustawień. Wyświetlacz i kontroler wymieniają dane za pośrednictwem wielożyłowego kabla, w tym linii zasilania i komunikacji.
- Wyłączniki bezpieczeństwa (dźwignie hamulca): Dźwignie hamulca w rowerach elektrycznych są zwykle wyposażone w przełączniki odcinające, które wysyłają sygnał do sterownika w celu natychmiastowego odcięcia zasilania silnika podczas hamowania. Zazwyczaj wykorzystywany jest do tego prosty obwód dwuprzewodowy, działający jako sygnał włączania/wyłączania do sterownika.
- Oświetlenie i akcesoria: Wiele rowerów elektrycznych posiada również przednie/tylne światła, klakson, ładowarki USB itp. Mogą one być sterowane przez główny kontroler lub działać na oddzielnych obwodach, ale w systemach wysokiej klasy mogą być również adresowane za pośrednictwem magistrali komunikacyjnej.
Szczegółowy przewodnik po akcesoriach do e-rowerów i rowerów cargo można znaleźć na stronie Przeczytaj ten artykuł, aby uzyskać bardziej wyczerpującą odpowiedź lub sprawdź nasze Strona Cargo Bike 101.
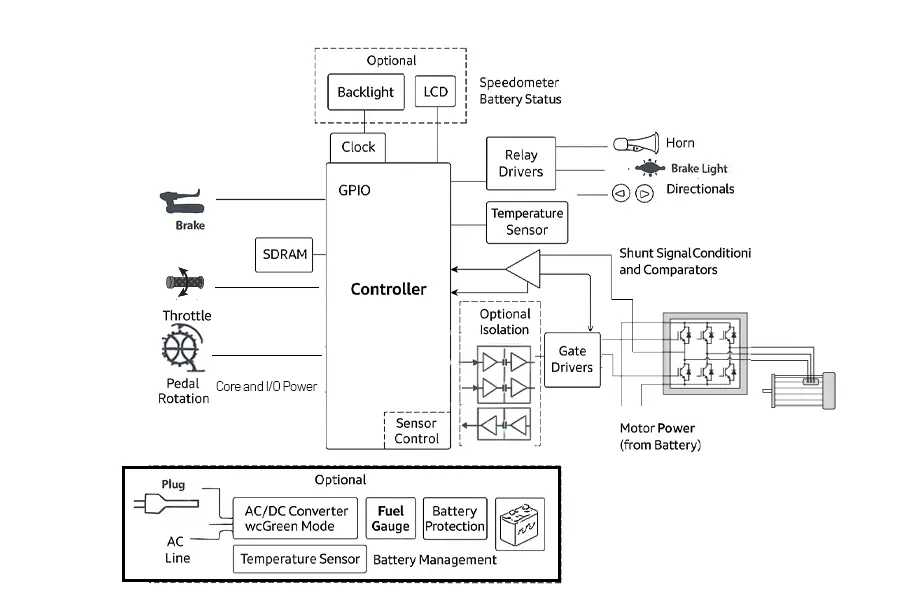
Rysunek 2: Schemat blokowy typowego systemu sterowania rowerem elektrycznym i zarządzania akumulatorem. Centralny kontroler łączy się z kluczowymi wejściami - przepustnicą, czujnikami pedałów, dźwigniami hamulca - i zarządza wyjściami, takimi jak sygnały napędu silnika za pośrednictwem sterowników bramek, sterowników przekaźników i połączeń GPIO. Opcjonalne moduły, takie jak wyświetlacze LCD, ładowarki akumulatorów, wskaźniki paliwa i podświetlenia, rozszerzają funkcjonalność systemu. Komunikacja między komponentami umożliwia koordynację w czasie rzeczywistym zasilania silnika, oświetlenia, wyłączników bezpieczeństwa i monitorowania stanu akumulatora.
Czym są protokoły komunikacyjne dla rowerów elektrycznych?
W kontekście rowerów elektrycznych protokoły komunikacyjne odnoszą się do metody i formatu, za pomocą których komponenty elektroniczne wymieniają dane. Wczesne lub podstawowe rowery elektryczne często nie miały złożonej sieci cyfrowej - wiele sygnałów było analogowych lub prostych obwodów włączania/wyłączania. Na przykład przepustnica wysyła napięcie analogowe, aby wskazać, ile mocy chce rowerzysta, a przełącznik hamulca po prostu otwiera lub zamyka obwód, aby odciąć zasilanie. Jednak w miarę jak rowery elektryczne stawały się coraz bardziej wyrafinowane - z inteligentnymi wyświetlaczami, zaawansowanymi czujnikami, a nawet integracją GPS lub smartfona - pojawiła się potrzeba solidniejszej komunikacji cyfrowej.
Obecnie w systemach rowerów elektrycznych dominują dwa podstawowe protokoły komunikacji cyfrowej:
- UART (Universal Asynchronous Receiver-Transmitter): Metoda komunikacji szeregowej, która tworzy bezpośrednie połączenie danych jeden-do-jednego między dwoma urządzeniami (zazwyczaj kontrolerem i wyświetlaczem).
- Magistrala CAN (Controller Area Network): Protokół sieciowy, który umożliwia wielu urządzeniom (kontroler, wyświetlacz, BMS akumulatora, czujniki itp.) komunikację za pośrednictwem tych samych przewodów magistrali.
Oprócz UART i magistrali CAN, dwa inne protokoły komunikacyjne są czasami używane w systemach rowerów elektrycznych:
- SIF (Serial Interface Format): Jest to zastrzeżony lub uproszczony protokół powszechnie spotykany w niektórych markowych systemach (np. Shimano STEPS lub starszych wyświetlaczach). Jest on zwykle używany do podstawowej wymiany danych między kontrolerem a wyświetlaczem lub przyciskami zdalnymi. Ponieważ SIF brakuje otwartej standaryzacji i elastyczności, jest on głównie ograniczony do określonych marek lub starszych modeli.
- RS-485 (zalecany standard 485): RS-485 to protokół komunikacji szeregowej klasy przemysłowej, znany ze swojej niezawodności na długich dystansach i odporności na zakłócenia. Chociaż nie jest tak powszechny jak UART lub CAN w konsumenckich rowerach elektrycznych, pojawia się w niektóre wysokiej klasy lub komercyjne systemy flotoweZwłaszcza tam, gdzie wymagana jest solidność i rozbudowane okablowanie, jak w przypadku rowerów współdzielonych, flot wypożyczalni lub wytrzymałych rowerów elektrycznych.
Protokoły te są zasadniczo "językami" elektroniki roweru elektrycznego. Jeśli wszystkie komponenty mówią tym samym językiem, informacje przepływają prawidłowo; jeśli nie, urządzenia nie będą się rozumieć. Właśnie dlatego dopasowanie protokołu ma kluczowe znaczenie na przykład podczas parowania wyświetlacza z kontrolerem. Nawet jeśli wtyczka pasuje, niezgodność protokołu oznacza, że części nie będą ze sobą współpracować.
Przegląd wykorzystania rynku (szacowane trendy w latach 2024-2025)
Chociaż nie ma powszechnie opublikowanego podziału wykorzystania protokołów na rynku rowerów elektrycznych, w oparciu o spostrzeżenia branżowe i głównych dostawców systemów (np. Bosch, Bafang, Shimano, Mahle itp.), Poniżej przedstawiono następujące informacje rozsądna szacowana dystrybucja od 2025 roku:
| Protokół | Udział w użytkowaniu (szacowany) | Typowe zastosowania | Notatki |
|---|---|---|---|
| UART | ~50-60% | Rowery elektryczne klasy podstawowej i średniej | Powszechnie stosowane ze względu na prostotę i niski koszt |
| Magistrala CAN | ~30-35% | Wysokiej klasy, inteligentne lub modułowe rowery elektryczne | Większa popularność dzięki inteligentnej integracji |
| RS-485 | ~5-10% | Systemy flotowe, konfiguracje komercyjne z długimi przewodami | Ograniczone do określonych przypadków użycia |
| SIF / zastrzeżone | <5% | Systemy specyficzne dla marki lub starsze | Występuje głównie w starszych lub zamkniętych ekosystemach |
Uwaga: Liczby te są uogólnione na rynkach globalnych (UE, CN, NA) i opierają się na trendach OEM, dokumentacji publicznej, danych z rozbiórki i spostrzeżeniach dostawców komponentów.
Łatwiejsze definiowanie protokołów komunikacji z rowerami elektrycznymi :
Mówiąc prościej, protokoły komunikacyjne w rowerach elektrycznych są następujące języki lub reguły, które pozwalają różnym częściom elektronicznym komunikować się ze sobą. Jeśli komponenty nie mówią tym samym językiem, nie mogą się zrozumieć - nawet jeśli wtyczka fizycznie pasuje.
Analogia: Rozmowa jeden na jeden a czat grupowy
Wyobraźmy sobie dwa sposoby komunikacji w życiu codziennym, aby zrozumieć protokoły rowerów elektrycznych:
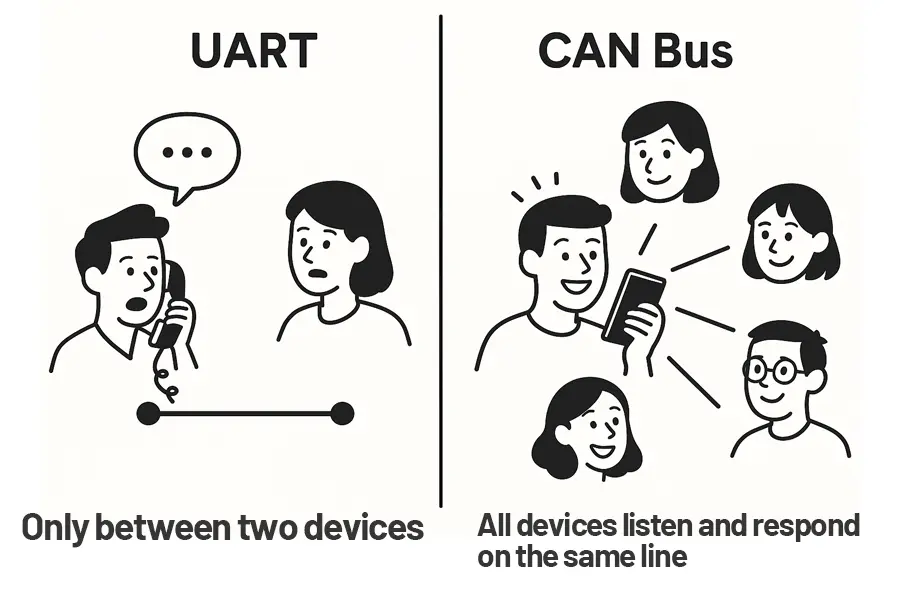
UART: jak rozmowa telefoniczna jeden na jeden
- UART (Universal Asynchronous Receiver-Transmitter) jest jak rozmowa z przyjacielem przez telefon.
- Tylko dwa urządzenia może rozmawiać jednocześnie, jak wyświetlacz i kontroler.
- Jeśli chcesz rozmawiać z innym urządzeniem, potrzebujesz inny przewód (lub inny telefon).
- Jest to proste, ale nieskalowalne w przypadku wielu urządzeń.
- Powszechne w Podstawowe systemy rowerów elektrycznych z ograniczonymi funkcjami.
AN Bus: Jak czat grupowy
- Magistrala CAN (Controller Area Network - sieć kontrolerów) jest jak czat grupowy na WhatsApp lub WeChat.
- Wszystkie urządzenia (kontroler, bateria, wyświetlacz, czujnik, światła) znajdują się w tym samym pokoju rozmów.
- Każda wiadomość jest oznaczona identyfikatorem nadawcy, a każde urządzenie odczytuje tylko wiadomości przeznaczone dla niego.
- To dużo bardziej wydajny Jest to idealne rozwiązanie, gdy istnieje wiele komponentów, które muszą ze sobą współpracować.
- Używany w Inteligentne, zaawansowane systemy rowerów elektrycznych, często z GPS, Bluetooth i integracją aplikacji.
| Funkcja | UART (połączenie telefoniczne) | Magistrala CAN (czat grupowy) |
|---|---|---|
| Typ połączenia | Jeden do jednego (punkt-punkt) | Jeden do wielu (współdzielona magistrala) |
| Skalowalność | Niski - wymaga dodatkowych przewodów dla większej liczby urządzeń | Wysoki - wiele urządzeń korzysta z tych samych przewodów |
| Przepływ komunikacji | Tylko między dwoma urządzeniami | Wszystkie urządzenia nasłuchują i odpowiadają na tej samej linii |
| Złożoność | Prosty | Bardziej złożony, ale potężny |
| Przypadek użycia | Podstawowe rowery elektryczne (tylko wyświetlacz ↔ kontroler) | Inteligentne rowery elektryczne z BMS, aplikacją, czujnikami itp. |
Rola protokołów komunikacyjnych
Protokoły komunikacyjne w rowerach elektrycznych służą kilku ważnym celom:
- Udostępnianie danych: Umożliwiają kontrolerowi wysyłanie danych w czasie rzeczywistym do wyświetlacza (prędkość, stan naładowania baterii, kody błędów) i odbieranie poleceń zwrotnych (np. zmiana poziomu wspomagania, włączanie/wyłączanie świateł). Bez odpowiedniego protokołu możesz nie uzyskać wiarygodnego odczytu prędkości lub nie być w stanie dostosować ustawień.
- Koordynacja komponentów: W zaawansowanych systemach wiele mikrokontrolerów musi ze sobą współpracować. Na przykład inteligentna bateria z własnym systemem zarządzania baterią (BMS) może komunikować się ze sterownikiem silnika, aby zapobiec nadmiernemu prądowi lub wyświetlić dokładny procent baterii. Magistrala CAN lub podobna sieć umożliwia akumulatorowi, sterownikowi silnika, wyświetlaczowi, a nawet czujnikom dzielenie się informacjami w sieci składającej się z wielu węzłów.
- Bezpieczeństwo i niezawodność: Dobrze zaprojektowany protokół zapewnia, że w przypadku wystąpienia błędu lub utraty sygnału (np. uszkodzenia kabla), system może to wykryć i podjąć bezpieczne działania (np. odciąć zasilanie silnika). Solidne protokoły, takie jak CAN, obejmują sprawdzanie błędów i priorytetyzację komunikatów, aby sobie z tym poradzić. Prostsze sygnały analogowe nie mają takiej obsługi błędów - jeśli przewód przepustnicy poluzuje się, sterownik może błędnie zinterpretować hałas jako sygnał przepustnicy, chyba że istnieją odpowiednie zabezpieczenia.
- Możliwość rozbudowy: W przypadku bogatych w funkcje rowerów elektrycznych (lokalizatory GPS, immobilizery antykradzieżowe, wiele czujników wspomagania itp.) sieć komunikacyjna ułatwia dodawanie lub usuwanie urządzeń. Zamiast każdego nowego urządzenia wymagającego dedykowanego połączenia kablowego z kontrolerem, urządzenie może dołączyć do wspólnej magistrali i udostępniać dane wszystkim pozostałym. Ta skalowalność jest kluczowym powodem, dla którego nowoczesne, wysokiej klasy rowery elektryczne zmierzają w kierunku magistrali CAN.
Podsumowując, protokół komunikacyjny jest kręgosłupem systemu elektrycznego roweru elektrycznego, zapewniając, że wszystkie części elektroniczne działają zgodnie. W innym poście zagłębimy się w dwa główne typy protokołów (UART i CAN), analizując sposób działania każdego z nich i ich odpowiednie zastosowania w rowerach elektrycznych i rowerach elektrycznych. rowery elektryczne cargo. sprawdź, jeśli jesteś zainteresowany:
- "Zrozumieć UART w rowerach elektrycznych: Jak prosta komunikacja szeregowa napędza jazdę"
- Przyjazny dla początkujących przewodnik po tym, jak UART umożliwia podstawową wymianę danych między komponentami roweru elektrycznego, takimi jak wyświetlacze i kontrolery.
- "Czym jest magistrala CAN w rowerach elektrycznych? Inteligentniejszy sposób podłączania akumulatorów, czujników i nie tylko"
- Dowiedz się, w jaki sposób nowoczesne rowery elektryczne wykorzystują magistralę CAN do obsługi komunikacji z wieloma urządzeniami, zaawansowanych wyświetlaczy i diagnostyki systemu.
Scenariusze zastosowań: Który protokół komunikacyjny dla którego roweru elektrycznego?
Przydatne jest zrozumienie, w jaki sposób UART i CAN są wybierane w praktyce dla różnych projektów rowerów elektrycznych. Rozważymy dwie szerokie kategorie: konsumenckie rowery elektryczne (w tym typowe rowery podmiejskie lub rekreacyjne) I e-rowery cargo/flotowe (często używane do dostaw biznesowych lub przez floty wypożyczalni)zauważając, że często mają one różne priorytety.

- Standardowe konsumenckie rowery elektryczne (miejskie, górskie, szosowe): Są to rowery, które wiele osób kupuje do użytku osobistego. Obejmują one zarówno modele podstawowe, jak i bardzo wysokiej klasy. Na niższym poziomie (modele wrażliwe na koszty) komunikacja UART jest niezwykle powszechna. Na przykład prosty rower elektryczny 36 V z czujnikiem kadencji pedałowania i podstawowym wyświetlaczem LED prawdopodobnie wykorzystuje UART (lub nawet sygnały analogowe) między kontrolerem a minimalnym wyświetlaczem. Skupiamy się tutaj na opłacalność i podstawowa funkcjonalność. Wiele takich rowerów korzysta z powszechnie dostępnych kontrolerów i wyświetlaczy, które są zgodne z faktycznym protokołem UART, co oznacza, że marki rowerów mogą pozyskiwać komponenty od różnych producentów OEM. Jest to atrakcyjne dla nabywców B2B, którzy chcą elastyczności w używaniu, powiedzmy, ładniejszego wyświetlacza od dostawcy A z kontrolerem od dostawcy B - tak długo, jak oba mówią UART w tym samym formacie, może to działać (choć trzeba zweryfikować kompatybilność pinów i oprogramowania układowego). W wyższej klasy rowerach konsumenckich, zwłaszcza tych produkowanych przez duże marki, istnieje tendencja do stosowania magistrali CAN. Wysokowydajne e-MTB lub e-rowery szosowe z czujnikami momentu obrotowego i fantazyjnymi wyświetlaczami mogą wykorzystywać CAN do płynnej integracji. Jednak niektóre marki nadal używają UART lub innych zastrzeżonych łączy szeregowych nawet w wysokiej klasy rowerach; zależy to od producenta i jego filozofii projektowania.

- Rowery elektryczne Cargo i floty komercyjne: Rowery elektryczne Cargo są przeznaczone do przewożenia ciężkich ładunków lub pasażerów i są często używane przez firmy (usługi dostawcze, rowery pocztowe itp.). Rowery te mają tendencję do nadawania priorytetu solidność, bezpieczeństwo i możliwości zarządzania flotą nad kosztami elektroniki. To właśnie w tym segmencie magistrala CAN naprawdę zyskała na popularności. Na przykład rowery towarowe mogą mieć dwie baterie zwiększenie zasięgu - zarządzanie dwoma akumulatorami wymaga komunikacji w celu zrównoważenia rozładowania lub przynajmniej raportowania stanu każdego z nich. CAN ułatwia jednemu kontrolerowi komunikację z dwoma jednostkami BMS (po jednej w każdym akumulatorze) na tej samej magistrali. Rowery cargo mogą mieć również dodatkowe akcesoria: światła hamowania, kierunkowskazy, a nawet elektroniczne zamki - koordynacja ich za pośrednictwem centralnej magistrali upraszcza okablowanie i sterowanie. Ponadto, ponieważ rowery elektryczne cargo często działają we flotach, firmy lubią mieć telematyka na nich: Lokalizatory GPS, które mogą zgłaszać lokalizację roweru, jego użytkowanie i wszelkie usterki. W przypadku systemu z obsługą CAN, moduł telematyczny może po prostu podsłuchiwać komunikaty CAN dotyczące prędkości, stanu akumulatora itp. i przesyłać te informacje. W rzeczywistości jedno studium przypadku z europejską flotą dostawczą wykazało, że podłączenie do magistrali CAN umożliwiło zdalne monitorowanie danych serwisowych (takich jak przebieg), zdalne wyłączanie silnika w celu zabezpieczenia przed kradzieżą oraz bezprzewodowe aktualizacje oprogramowania układowego motocykla - funkcje niezwykle przydatne w zarządzaniu flotą. Byłoby to kłopotliwe do wdrożenia w rowerze opartym na UART.
- Mix-and-Match a systemy zintegrowane: Jeśli marka rowerów elektrycznych chce mieć swobodę mieszania komponentów lub zezwalania na aktualizacje na rynku wtórnym, zwykle trzyma się systemów opartych na UART. Zauważyliśmy, że Systemy UART umożliwiają łatwą wymianę wyświetlaczy lub zmianę ustawień silnika.. Mniejsze firmy produkujące e-rowery mogą preferować tę drogę, aby uniknąć przywiązania do jednego dostawcy - mogą zmienić dostawcę silnika/sterownika bez zmiany całego ekosystemu, o ile protokół pozostanie UART i mogą dostosować oprogramowanie układowe. Z drugiej strony, Marki skoncentrowane na optymalizacji systemu i zgodności często wybierają CAN. Na przykład rowery elektryczne z napędem Bosch wykorzystują magistralę podobną do CAN (Bosch ma zastrzeżony protokół oparty na CAN) łączącą silnik, wyświetlacz i akumulator. Gwarantuje to, że żadne części innych firm nie mogą kolidować; wszystko jest precyzyjnie dostrojone. Zaletą jest doskonała niezawodność i bezpieczeństwo - system zgłosi błąd, jeśli cokolwiek będzie poza specyfikacją. Wadą jest to, że jako nabywca B2B (jak producent OEM roweru wybierający Bosch), zobowiązujesz się do zakupu silnika, kontrolera, akumulatora, wyświetlacza Wszystko od Bosch w pakiecie.
- Rowery cargo - szczegółowe rozważania: Rowery towarowe, zwłaszcza w UE, często podlegają bardziej rygorystycznej kontroli, ponieważ mogą przewozić cięższe ładunki, a nawet pasażerów. Na przykład w Niemczech istnieje norma (DIN 79010) dotycząca bezpieczeństwa rowerów towarowych (głównie aspektów mechanicznych, takich jak wytrzymałość ramy i hamowanie). Chociaż norma ta nie dyktuje protokołów komunikacyjnych, to nastawienie na bezpieczeństwo w rowerach towarowych zachęca do korzystania z protokołu, który może zapewnić, na przykład, że jeśli coś pójdzie nie tak (przegrzanie silnika lub niski poziom naładowania akumulatora), system może o tym poinformować i podjąć odpowiednie działania. Solidność CAN i obsługa błędów pomagają osiągnąć te cele w zakresie bezpieczeństwa. Ponadto rowery elektryczne cargo często działają w środowisku miejskim (dostawy w miastach), gdzie występuje dużo szumów radiowych/elektrycznych, a stawka jest wysoka, jeśli błąd komunikacji wystąpi w niewłaściwym momencie. W tym przypadku odporność CAN na zakłócenia jest tutaj dużym plusem, zapobiegając błędnej komunikacji, która może prowadzić do nieobliczalnych zachowań.


Normy bezpieczeństwa i zgodność systemu elektrycznego (UE/USA)
Niezależnie od zastosowanego protokołu komunikacyjnego, systemy elektryczne rowerów elektrycznych muszą spełniać normy bezpieczeństwa, aby zapewnić ich bezpieczne i legalne działanie, zwłaszcza na kluczowych rynkach, takich jak Europa i Stany Zjednoczone. Protokół komunikacyjny może pośrednio wpływać na zgodność roweru - na przykład protokół, który pozwala na nieograniczone modyfikacje użytkownika, może stanowić zagrożenie dla zgodności, podczas gdy protokół, który jest zablokowany, może pomóc zapewnić, że rower pozostanie w granicach prawa. Przeanalizujmy odpowiednie standardy i ich powiązania:
Jak protokoły komunikacyjne wpływają na zgodność rowerów elektrycznych w Unii Europejskiej?
Unia Europejska (UE) - EN 15194: W UE większość rowerów elektrycznych (rowery ze wspomaganiem pedałowania z silnikiem o mocy wyjściowej <= 250 W i ograniczeniem wspomagania przy prędkości 25 km/h) jest klasyfikowana jako EPAC (Cykle wspomagane elektronicznie). Standard EN 15194 ma zastosowanie do EPAC i określa wymagania i metody testowania w zakresie bezpieczeństwa i wydajności. Obejmuje to bezpieczeństwo mechaniczne (hamulce, rama itp.) i elektryczne (okablowanie, EMC itp.), a także zapewnienie, że rower spełnia ograniczenia prędkości i mocy.
- W przypadku protokołów komunikacyjnych jednym z istotnych aspektów jest kompatybilność elektromagnetyczna (EMC)System nie powinien emitować nadmiernych zakłóceń ani być nadmiernie zakłócany przez zakłócenia. Dobrze zaprojektowana linia komunikacyjna CAN lub UART powinna przejść testy EMC (EN 15194 odnosi się do EN 55014 lub podobnej dla EMC). Testy odporny na hałas charakter CAN może być zaletą w spełnianiu tych wymagań EMC, ponieważ z natury lepiej radzi sobie z hałasem, ale systemy UART mogą również spełniać wymagania, jeśli są odpowiednio ekranowane.
- Manipulowanie prędkością i mocą: Norma EN 15194 wymaga, aby wspomaganie wyłączało się przy prędkości 25 km/h i aby użytkownik nie mógł łatwo dostosować tego limitu powyżej wartości ustawowej. Jeśli rower wykorzystuje UART, a producent pozostawia dostęp do pól programowania, użytkownik może potencjalnie ją ograniczyć - może to spowodować problemy ze zgodnością z przepisami. Dlatego niektórzy producenci stosują zablokowane systemy CAN, aby uniemożliwić użytkownikom zmianę ograniczenia prędkości. Na przykład silniki Bafang oparte na CAN mają ustalone ograniczenie prędkości i nie można go zmienić za pomocą wyświetlacza, co pomaga zapewnić zgodność z przepisami od razu po wyjęciu z pudełka. W przeciwieństwie do tego, w wielu systemach UART, doświadczony użytkownik może wejść w tryb ustawień na wyświetlaczu i dostosować rozmiar koła lub ograniczenie, lub użyć kabla do programowania, co może złamać literę prawa, jeśli sprawi, że rower przekroczy prędkość wspomagania 25 km/h.
- Bezpieczeństwo elektryczne: Norma EN 15194 (najnowsze wersje) obejmuje podstawowe bezpieczeństwo elektryczne, ale co ciekawe nie obejmuje w pełni bezpieczeństwa baterii - zakłada, że sam zestaw akumulatorów ma być zgodny z innymi normami. Koncentruje się bardziej na integracji, okablowaniu i podstawowej ochronie (np. brak odsłoniętych części pod napięciem itp.). Protokół komunikacyjny nie ma na to bezpośredniego wpływu, ale pośrednio protokół taki jak CAN, który umożliwia BMS komunikację z kontrolerem, może zwiększyć bezpieczeństwo - np. BMS może wysłać polecenie "zatrzymaj rozładowanie", jeśli akumulator się przegrzewa. Chociaż nie jest to wymagane przez normę EN 15194, tego rodzaju funkcja pomaga rowerowi spełnić ogólne oczekiwania dotyczące bezpieczeństwa (unikanie niekontrolowanego wzrostu temperatury).
Ponadto europejskie rowery elektryczne cargo (zwłaszcza te, które przewożą towary/pasażerów) mogą być zobowiązane do spełnienia następujących wymogów Dyrektywa maszynowa jeśli nie podlegają ściśle przepisom rowerowym (niektóre ciężkie rowery towarowe tak). Ponownie kładzie to nacisk na solidne zabezpieczenia przed awarią. Korzystanie z solidnego protokołu komunikacyjnego z zabezpieczeniem przed awarią (np. wyłączenie CAN w przypadku błędu) może pomóc w zapewnieniu zgodności z przepisami.
Więcej informacji o Standard UE dla rowerów elektrycznych
Jak protokoły komunikacyjne wpływają na zgodność rowerów elektrycznych w Stanach Zjednoczonych?
Stany Zjednoczone - UL 2849 i inne: W Stanach Zjednoczonych produkcja rowerów elektrycznych jest nieco mniej regulowana na poziomie federalnym pod względem wydajności (istnieje definicja produktu konsumenckiego roweru elektrycznego o niskiej prędkości jako maks. 750 W i 20 mil na godzinę na przepustnicy / 28 mil na godzinę na wspomaganiu pedału, ale nie ma obowiązkowych norm konstrukcyjnych na poziomie federalnym). Jednak, Certyfikacja bezpieczeństwa staje się kluczowa, zwłaszcza ze względu na obawy związane z pożarem baterii.
- UL 2849 to główny standard bezpieczeństwa dla systemów elektrycznych rowerów elektrycznych w Ameryce Północnej. Obejmuje ona cały elektryczny układ napędowy roweru elektrycznego - w tym akumulator, silnik, ładowarkę i wszystkie połączenia. Testy UL 2849 sprawdzają takie rzeczy, jak to, czy okablowanie może wytrzymać prądy, czy system jest chroniony przed zwarciami, a co ważne, obejmuje również UL 2271 dla akumulatorów (który jest standardem bezpieczeństwa specyficznym dla baterii). Jeśli chodzi o komunikację, UL 2849 nie określa protokołu, ale sprawdza, czy na przykład w przypadku utraty komunikacji lub wykrycia błędu system ulegnie bezpiecznej awarii (brak zdarzeń termicznych, brak niekontrolowanego rozruchu silnika). System oparty na CAN może mieć niewielką przewagę w zakresie nadmiarowości (np. jeśli komunikat przepustnicy zostanie utracony, CAN może to wykryć i odpowiednio wydłużyć czas). Ale nawet systemy UART mogą być zaprojektowane tak, aby spełniały wymagania UL 2849 (wymagają tylko dokładnej obsługi błędów w oprogramowaniu układowym kontrolera).
- Zapobieganie pożarom i porażeniu prądem elektrycznym: Normy takie jak UL 2849 koncentrują się na zapobieganiu pożarom i porażeniom elektrycznym. Na przykład, jeśli rower elektryczny ma podłączoną ładowarkę, komunikacja między akumulatorem a ładowarką (jeśli istnieje) nie powinna prowadzić do przeładowania. W szczególności Standard EnergyBus EnergyBus, o którym wspomnieliśmy, który jest oparty na CAN, był częściowo motywowany bezpieczeństwem - zapewniając, że każda ładowarka może bezpiecznie ładować dowolną baterię, komunikując się przez CANopen i włączając zasilanie tylko wtedy, gdy zostanie wykonane prawidłowe uzgadnianie. EnergyBus wykorzystuje specjalne złącze, które zawiera linie danych CAN, dzięki czemu ładowarka i akumulator najpierw nawiązują komunikację, a następnie zezwalają na prąd ładowania, aby uniknąć iskrzenia lub niedopasowanych napięć. Koncepcja ta jest zgodna z logiką bezpieczeństwa UL. Jeśli marka korzysta z EnergyBus, prawdopodobnie pomaga to w uzyskaniu certyfikatów bezpieczeństwa, ponieważ z natury zarządza bezpiecznymi interakcjami między komponentami.
- Zgodność z przepisami (prędkość/moc): W Stanach Zjednoczonych system klas (rowery elektryczne klasy 1, 2, 3) jest w dużej mierze systemem honorowym i nie jest tak rygorystycznie egzekwowany jak limity UE, ale ze względu na odpowiedzialność producenci zazwyczaj zapewniają, że rower elektryczny sprzedawany jako klasa 2 nie może być łatwo zmieniony, aby na przykład przekroczyć prędkość 20 mil na godzinę na przepustnicy. Również w tym przypadku pomocne może być użycie zamkniętego protokołu CAN - użytkownicy nie mogą po prostu podłączyć kabla i wyłączyć roweru. Warto zauważyć, że wiele firm produkujących rowery elektryczne reklamuje obecnie akumulatory lub systemy z certyfikatem UL, aby zapewnić klientom bezpieczeństwo. Na przykład HOVSCO (jak widać w ich bazie wiedzy) podkreśla, że ich rowery spełniają wymogi UL 2849 w zakresie bezpieczeństwa elektrycznego i EN 15194 w zakresie ogólnej zgodności bezpieczeństwa. Oznacza to, że okablowanie, złącza i komunikacja muszą działać bez powodowania zagrożeń.
Standardy międzynarodowe i inne: Oprócz norm EN 15194 i UL 2849, istnieją również inne istotne normy - np, Norma ISO 4210 (norma bezpieczeństwa rowerów) z częścią obejmującą wymagania dotyczące rowerów elektrycznych, a niemiecka DIN 79010 dla rowerów towarowych (które, jak zauważyliśmy, obejmują takie kwestie, jak wytrzymałość ramy pod obciążeniem ładunkiem i skuteczność hamowania). Nie dyktują one bezpośrednio elektroniki, ale standard roweru towarowego może pośrednio wymagać, aby, powiedzmy, wspomaganie nie działało nieprawidłowo pod dużym obciążeniem. Solidna komunikacja zapewnia, że nawet jeśli rower jest obciążony (i być może hałas elektryczny wzrasta lub bateria zwisa), sygnały między baterią, kontrolerem i czujnikami pozostają niezawodne.
Podsumowując, zgodność i bezpieczeństwo wpływają na niektóre decyzje projektowe między UART a CAN. Producent dążący do maksymalnego bezpieczeństwa może skłaniać się ku CAN ze względu na sprawdzanie błędów i kontrolę lub wdrożyć dodatkowe zabezpieczenia w systemach UART. Oba protokoły mogą być częścią bezpiecznego projektu, ale kluczowy jest sposób ich użycia. Protokół Zamknięty charakter systemów CAN może wymusić zgodność (np. ograniczenia prędkości, które nie mogą być regulowane przez użytkowników, zgodnie z wymogami prawa), podczas gdy Systemy UART oferują większą swobodę użytkownika, co jest mieczem obosiecznym. Producenci muszą upewnić się, że nawet rowery oparte na UART mają takie elementy, jak fizyczny lub programowy ogranicznik, którego nie można łatwo zhakować, aby pozostać w granicach prawnych.
Wreszcie, niezależnie od protokołu, używanie wysokiej jakości złącza i okablowanie jest częścią zgodności. W UE rower musi wytrzymać wibracje bez poluzowania przewodów, a w mokrych warunkach bez zwarcia. Złącza takie jak Higo/Julet (wodoodporne złącza szeroko stosowane w rowerach elektrycznych) są popularne nie tylko ze względu na wygodę, ale także dlatego, że pomagają spełnić następujące wymagania Stopień ochrony IP i wymagania dotyczące niezawodności. Magistrala CAN zazwyczaj wykorzystuje takie złącza (np. pojedyncze złącze Higo 4 lub 5-pin może przenosić dane CAN i zasilanie wyświetlacza). Wybór protokołu nie zmienia potrzeby stosowania dobrych złączy. odciążenie, izolacja i złącza blokujące aby zapobiec rozłączeniu (co może być niebezpieczne, jeśli, powiedzmy, sygnał odcięcia hamulca nie dotrze do kontrolera, ponieważ kabel się poluzował).
Podsumowując tę sekcję, zarówno Europa, jak i Stany Zjednoczone kładą obecnie duży nacisk na bezpieczeństwo rowerów elektrycznych. Zgodność z normami takimi jak EN 15194 i UL 2849 jest coraz bardziej nienegocjowalna dla renomowanych marek. Protokół komunikacyjny jest jednym z elementów układanki - środkiem zapewniającym koordynację i niezawodność systemu elektrycznego. Niezawodność magistrali CAN może pomóc w spełnieniu tych standardów, zapewniając solidną komunikację, podczas gdy systemy UART wymagają starannego zaprojektowania, aby były równie bezpieczne. Producenci często wybierają protokół, który najlepiej pasuje do strategii zgodności: UART w przypadku prostszych projektów, w których ryzykiem można łatwo zarządzać, lub CAN w przypadku złożonych systemów, w których funkcje bezpieczeństwa są najważniejsze.
Koszty i względy rynkowe przy wyborze protokołów komunikacyjnych
Przy podejmowaniu decyzji między protokołami komunikacyjnymi (lub ogólnie przy projektowaniu układu elektrycznego roweru elektrycznego) ważnym czynnikiem jest koszt - nie tylko koszt pieniężny, ale także "koszt" pod względem elastyczności i relacji z dostawcami. Oto, jak porównuje się koszty i co biorą pod uwagę kupujący lub inżynierowie B2B:
- Koszt sprzętu: Jak wspomniano wcześniej, system oparty na UART zazwyczaj wykorzystuje prostszy sprzęt. Kontroler i wyświetlacz potrzebują tylko funkcji UART, którą mają wbudowaną praktycznie wszystkie mikrokontrolery. Okablowanie może być odrobinę prostsze (mniej kwestii związanych z terminacją itp.). System oparty na CAN wymaga nieco więcej: układu nadawczo-odbiorczego CAN dla każdego urządzenia i prawdopodobnie mocniejszego MCU (choć obecnie nawet dość tanie MCU mają wbudowany CAN). Rzeczywista różnica w BOM (Bill of Materials) może być rzędu zaledwie kilku dolarów na rower w dużych ilościach, ale na konkurencyjnym rynku nadal ma to znaczenie. W przypadku zamówienia dużej floty rowerów te dolary się mnożą. To powiedziawszy Koszt sprzętu CAN spadł a kompromis może być łatwo uzasadniony dodatkową funkcjonalnością zapewnianą przez CAN.
- Koszty rozwoju i integracji: W przypadku startupu zajmującego się rowerami elektrycznymi lub małej firmy, opracowanie od podstaw systemu opartego na CAN może być kosztowne, jeśli nie posiadają one specjalistycznej wiedzy. Może to wymagać zatrudnienia inżynierów systemów wbudowanych zaznajomionych z CAN, zainwestowania w narzędzia i poświęcenia czasu na opracowanie niestandardowego oprogramowania układowego. Alternatywnie, jeśli kupią gotowy system (taki jak jednostki napędowe Bosch lub Shimano, które są oparte na CAN), koszt rozwoju po ich stronie jest niższy, ale koszt jednostkowy jest wyższy (systemy Bosch mają wyższą cenę, częściowo dlatego, że otrzymujesz w pełni zintegrowane rozwiązanie i markę). A System UART może być często złożony przy użyciu gotowych komponentów. ze znaną kompatybilnością - na przykład wiele firm korzysta z protokołów open-source lub standardowych, w przypadku których wiele prac inżynieryjnych zostało już wykonanych, a ryzyko jest niższe. Dla nabywcy B2B (powiedzmy firmy, która chce mieć kilka rowerów elektrycznych pod swoją marką), przejście na UART może oznaczać, że mogą oni pozyskać tańsze części generyczne, podczas gdy przejście na CAN często oznacza dostosowanie się do ekosystemu konkretnego dostawcy (który może pobierać licencje lub wyższe ceny).
- Koszty obsługi posprzedażnej i konserwacji: Czasami jest to pomijane. Operator floty (np. wypożyczalnia rowerów lub firma kurierska) może stwierdzić, że Rowery z magistralą CAN pozwalają zaoszczędzić pieniądze na konserwacji. Dlaczego? Ponieważ mogą diagnozować problemy zdalnie lub szybciej. System podłączony do magistrali CAN może szczegółowo zgłaszać kody błędów (na przykład "błąd czujnika temperatury akumulatora #2" jako konkretny kod). Technicy mogą podłączyć narzędzia diagnostyczne do magistrali CAN, aby zlokalizować problemy. Może to skrócić czas pracy. Ponadto, jak widać w przypadku IoT Venture, możliwe są takie rzeczy, jak zdalne aktualizacje oprogramowania układowego, co może obniżyć koszty fizycznego wycofywania motocykli w celu wprowadzenia pewnych poprawek. Z drugiej strony, początkowa konserwacja roweru z UART może być prostsza (być może mniej rzeczy może pójść nie tak w komunikacji), ale jeśli coś jest nie tak, może być konieczna wymiana części metodą prób i błędów, ponieważ system nie może powiedzieć dokładnie, co jest nie tak, poza być może miganiem diody LED. Dla indywidualnego konsumenta rower UART może być tańszy w naprawie, ponieważ może on użyć gotowych części i wiedzy społeczności, aby go naprawić, podczas gdy rower CAN może zmusić go do udania się do autoryzowanego serwisu (potencjalnie droższego). Istnieje więc kompromis między kosztami łatwość obsługi przez użytkownika (zwycięstwa UART) i Zaawansowane wsparcie diagnostyczne (CAN wygrywa, co może obniżyć koszty usług profesjonalnych).
- Koszty licencji i własności: Korzystanie z zastrzeżonego protokołu CAN może wiązać się z opłatami licencyjnymi lub ograniczeniami. Jeśli marka rowerowa opracuje własny protokół CAN, to w porządku, ale jeśli użyje czegoś takiego jak CANopen lub EnergyBus, może być konieczne przestrzeganie standardów i ewentualnie dołączenie do stowarzyszeń (np. EnergyBus e.V.). Koszty te są zazwyczaj niewielkie, ale warte odnotowania. Zastrzeżone systemy, takie jak Bosch, oznaczają, że producent OEM roweru kupuje jednostki napędowe jako pakiet; Bosch ustala cenę. W przypadku systemów UART często istnieje większa konkurencja między dostawcami części, co może obniżyć ceny.
- Percepcja i wartość dla klienta: Z marketingowego punktu widzenia marka może uzasadnić wyższą cenę roweru, który ma "elektronikę magistrali CAN klasy samochodowej", ponieważ brzmi to zaawansowanie i niezawodnie (nawet jeśli klient nie widzi bezpośrednio różnicy). Istnieje wartość w Doskonałe wyczucie i wydajność które często są dostarczane z systemami CAN (są one zwykle montowane w rowerach, które mają również wysokiej jakości silniki itp.) Tak więc marki ukierunkowane na rynek wyższej klasy lub klientów komercyjnych mogą wykorzystać CAN jako część oferty premium. I odwrotnie, w przypadku podstawowych rowerów elektrycznych klienci dbają głównie o to, aby działały i były przystępne cenowo - nie zapłacą dodatkowo tylko dlatego, że wyświetlacz roweru wykorzystuje CAN zamiast UART. Więc, wybór protokołu powinien być zgodny z segmentem rynkowym roweru.
- Zabezpieczenie na przyszłość: Kosztem branym pod uwagę przez inżynierów jest Koszt alternatywny braku zabezpieczenia na przyszłość. Jeśli teraz zainwestujesz w platformę opartą na UART, ale w przyszłym roku będziesz chciał dodać więcej funkcji (powiedzmy drugą baterię lub nowy typ czujnika), może się okazać, że stara platforma jest ograniczona, co wymusi przeprojektowanie. Niektóre firmy decydują, że na dłuższą metę bardziej opłacalne jest wybranie CAN od samego początku, nawet jeśli nie jest w pełni wykorzystywany, aby pozostawić miejsce na nowe funkcje i akcesoria. Może to zaoszczędzić koszty przebudowy w przyszłości. Jest to strategiczna decyzja: zapłacić nieco więcej z góry niż potencjalnie dużo więcej później, aby dokonać aktualizacji.
Jeśli chodzi o rzeczywiste ceny: trudno to określić, ale osoba z branży może powiedzieć, że na przykład podstawowy kontroler UART do roweru elektrycznego + zestaw wyświetlacza może wynosić, powiedzmy, $50-$100 luzem, podczas gdy równoważny zestaw oparty na CAN od dużej marki może wynosić kilkaset dolarów (ponieważ jest bardziej wyrafinowany). Jednak różnica ta często obejmuje również lepszą wydajność silnika, gwarancję itp. Różnica koszt przyrostowy wyłącznie dla protokołu (np. dodanie układu CAN) jest niewielkie, ale koszt ekosystemu (podłączenie do drogiego systemu w porównaniu z tanim systemem generycznym) może być duża.
Mówiąc wprost dla nabywcy roweru elektrycznego B2B:
- Jeśli Twoim priorytetem jest najniższy koszt jednostkowy i chcesz elastycznie zaopatrywać się u wielu dostawców, to Otwarty system oparty na UART jest atrakcyjna. Możesz rozejrzeć się za pasującymi wyświetlaczami i kontrolerami, a nawet negocjować z wieloma fabrykami.
- Jeśli Twoim priorytetem jest wydajność, niezawodność i system "pod klucz (i jesteś skłonny za to zapłacić), a System oparty na CAN od renomowanego dostawcy może zaoszczędzić ci bólu głowy i dodać wartość do twojego produktu (przy wyższych kosztach, które, miejmy nadzieję, odzyskasz, ustalając wyższe ceny rowerów lub zwiększając wydajność).
Ograniczenia i przyszłe trendy
Nawet jeśli wychwalamy zalety UART i CAN, warto zwrócić uwagę na ograniczenia obecnego stanu komunikacji w rowerach elektrycznych i dokąd może to zmierzać:
- Brak ogólnobranżowej standaryzacji: W przeciwieństwie do świata motoryzacji, w którym prawie każdy samochód korzysta z magistrali CAN i standardowej diagnostyki (OBD-II), branża rowerów elektrycznych jest nadal rozdrobniona. Istnieje Brak jednego uniwersalnego protokołu z którego korzystają wszystkie rowery elektryczne. Implementacje UART różnią się (każdy producent może mieć różne formaty danych przez UART), a implementacje CAN są często zastrzeżone. Jest to ograniczenie dla konsumentów i monterów rowerów - nie jest to "plug and play" między różnymi markami. Nie można wziąć losowego wyświetlacza i oczekiwać, że będzie działał z losowym kontrolerem, chyba że wyraźnie używają tego samego protokołu i oprogramowania układowego. EnergyBus jest obiecującym wysiłkiem na rzecz standaryzacji (z CANopen CiA-454 definiującym komunikaty dla komponentów rowerów elektrycznych), ale nie jest jeszcze wszechobecny. Jeśli EnergyBus lub podobne standardy zyskają na popularności, możemy zobaczyć prawdziwie interoperacyjne komponenty - na przykład bateria od producenta X może być używana z systemem silnika od producenta Y, a protokół oparty na CANopen zapewnia, że rozumieją się nawzajem. Przyniosłoby to korzyści nabywcom B2B (więcej opcji dostawców) i konsumentom (więcej opcji aktualizacji/naprawy). Jednak gracze branżowi mają również motywację biznesową do utrzymywania zastrzeżonych systemów (aby zablokować klientów). Napięcie między Standaryzacja a kontrola własnościowa będzie kształtować przyszłość protokołów dla rowerów elektrycznych.
- Przepustowość i zapotrzebowanie na dane: Obecnie komunikacja w rowerach elektrycznych obejmuje stosunkowo niewielką ilość danych. Ale przyszłe rowery elektryczne mogą przesyłać więcej informacji - wyobraźmy sobie zbieranie danych z czujników momentu obrotowego o wysokiej częstotliwości lub pomiarów mocy o wysokiej rozdzielczości do celów szkoleniowych, a nawet wideo z kamer dla bezpieczeństwa. Sieć CAN przy klasycznych prędkościach może stać się wąskim gardłem, jeśli przesyłana ma być duża ilość danych. Przemysł motoryzacyjny posiada CAN-FD (rozszerzoną wersję CAN z większymi ramkami danych i wyższą przepustowością) i inne protokoły, takie jak Ethernet, dla potrzeb wysokiej przepustowości. W przypadku rowerów elektrycznych CAN-FD może w końcu pojawić się w razie potrzeby lub BLE/Wi-Fi do rozładowywania dzienników danych. Komunikacja bezprzewodowa może również uzupełniać protokoły przewodowe: już teraz wiele rowerów elektrycznych wykorzystuje Bluetooth Low Energy do łączenia roweru z aplikacją na smartfona. Jest to poza zakresem wewnętrznego systemu elektrycznego, ale warte odnotowania jako równoległy kanał. Być może w przyszłości niektóre prostsze rowery elektryczne mogą nawet zrezygnować z przewodowego wyświetlacza i korzystać z modułu bezprzewodowego do telefonu - chociaż krytyczne sterowanie (takie jak sygnały przepustnicy lub hamulca) prawdopodobnie pozostanie przewodowe ze względu na niezawodność. We flotach towarowych możemy zaobserwować większą integrację komunikacji V2X (vehicle-to-everything) - e-rowery rozmawiające z systemami logistycznymi lub infrastrukturą drogową, które ponownie byłyby nakładane na podstawowy system magistrali CAN.
- Obawy dotyczące bezpieczeństwa: Rowery elektryczne stają się coraz bardziej połączone i wykorzystują bardziej złożoną komunikację, cyberbezpieczeństwo staje się problemem. System UART bez zewnętrznej łączności jest praktycznie odporny na włamania (ktoś musiałby fizycznie podłączyć się do przewodów). Ale magistrala CAN, która łączy się z modułem Bluetooth lub modułem GSM (do śledzenia floty) wprowadza potencjalne luki w zabezpieczeniach. Producenci będą musieli upewnić się, że ich protokoły (zwłaszcza bezprzewodowe interfejsy do magistrali) są bezpieczne, aby zapobiec złośliwej kontroli (wyobraźmy sobie włamanie do IoT, które mogłoby zdalnie wyłączyć flotę rowerów dostawczych - jest to daleko idący, ale teoretycznie możliwy scenariusz, jeśli nie zostanie zabezpieczony). Zastrzeżone protokoły z natury są w pewnym stopniu bezpieczne dzięki niejasności, ale gdy CAN staje się powszechnie znany w rowerach elektrycznych, źli aktorzy mogą próbować wstrzykiwać komunikaty CAN za pośrednictwem odsłoniętego portu. Dlatego w przyszłości możemy zobaczyć więcej szyfrowania lub uwierzytelniania w komunikacji rowerów elektrycznych.
- Doświadczenie użytkownika: Ostatecznie, niezależnie od używanego protokołu, powinien on zapewniać dobre wrażenia użytkownika. Kierowcy dbają o takie rzeczy, jak płynne dostarczanie mocy, dokładne informacje na wyświetlaczu i funkcje bezpieczeństwa działające w razie potrzeby. Ograniczeniem wczesnych systemów opartych na CAN było to, że czasami też użytkownicy czuli się sfrustrowani, nie mogąc nawet zmienić prostych preferencji. W miarę dojrzewania systemów producenci mogą znaleźć sposoby na zapewnienie użytkownikom elastyczności (za pośrednictwem autoryzowanych aplikacji lub ustawień) bez uszczerbku dla kontroli. Na przykład, być może aplikacja pozwoli na ograniczone strojenie (w bezpiecznych granicach) nawet w systemie CAN lub pozwoli akcesoriom innych firm, które są certyfikowane do komunikacji na magistrali (być może przy użyciu standardowych komunikatów EnergyBus). Możemy spodziewać się nieco większej otwartości w miarę standaryzacji protokołów, jak na ironię nawet w świecie CAN.
Na zakończenie Elektryczny system komunikacji rowerów elektrycznych - czy to UART, czy CAN - ma kluczowe znaczenie dla wydajności, bezpieczeństwa i modułowości roweru.. Inżynierowie projektujący rowery elektryczne muszą zrównoważyć prostotę UART z wyrafinowaniem CAN. Nabywcy B2B muszą rozważyć, w jaki sposób wybór wpływa na koszty, łańcuch dostaw i propozycję wartości ich produktu. Branża wydaje się zmierzać w kierunku magistrali CAN, ponieważ rowery elektryczne ewoluują w kierunku bardziej połączonych i wydajnych maszyn, ale systemy oparte na UART prawdopodobnie pozostaną równoległe dla prostszych, tańszych modeli przez jakiś czas (w końcu są "wystarczająco dobre" dla ogromnego segmentu rowerzystów).
Poprzez zrozumienie tych protokołów komunikacyjnych - zasadniczo język elektryczny rowerów elektrycznych - zyskuje się znacznie głębsze uznanie dla tego, jak rower elektryczny działa wewnętrznie. Od przekręcenia przepustnicy lub nacisku na pedał, po skok silnika i liczby na wyświetlaczu, wszystko to jest obsługiwane przez bity i bajty przesuwające się po przewodach, zapewniając, że bateria, silnik i kierowca są zsynchronizowane. Niezależnie od tego, czy jest to elegancki miejski rower elektryczny, czy ciężki pojazd do przewozu ładunków, ta harmonia sprawia, że jazda jest bezpieczna i nie wymaga wysiłku. Ostatecznie celem każdego protokołu jest sprawienie, aby technologia zniknęła w tle, tak aby rowerzyści mogli po prostu cieszyć się podróżą - ale teraz, miejmy nadzieję, z odrobiną wglądu w imponującą elektroniczną koordynację dziejącą się pod ich stopami.
Źródła:
- Przewodnik po rowerach elektrycznych Qiolor - "Jak wybrać kompatybilny wyświetlacz dla kontrolera roweru elektrycznego" (2025) - omówienie języków UART i CANBUS oraz znaczenie dopasowania protokołów.
- Velco.tech - "CAN vs UART: różnice między trybami komunikacji" (2024) - wyjaśnienie prostoty UART w porównaniu z możliwościami sieci CAN i wymienienie ich zalet/ograniczeń.
- Centrum pomocy Biktrix - "Czym są protokoły CANBUS i UART?" - widok zorientowany na użytkownika, w jaki sposób CAN blokuje ustawienia (stałe ograniczenie prędkości) vs UART umożliwia modyfikacje, a także porównanie wymienności wyświetlaczy.
- IoT Venture (studium przypadku z flotą CYCLE) - opis korzyści z integracji CAN we flotach rowerów elektrycznych: dostęp do danych serwisowych, zdalne wyłączanie silnika, aktualizacje OTA.
- Wiedza HOVSCO - "Jakie funkcje bezpieczeństwa mają rowery elektryczne?" - Uwagi dotyczące normy EN 15194 (UE) zapewniającej ograniczenia prędkości/mocy i trwałość oraz UL 2849 (USA) koncentrującej się na bezpieczeństwie elektrycznym/pożarowym, a także wzmianka o normie DIN 79010 dotyczącej bezpieczeństwa rowerów towarowych.
- Texas Instruments App Note - "Rozważania dotyczące projektowania sprzętu dla roweru elektrycznego z silnikiem BLDC" - Przedstawiono typowe schematy blokowe systemów rowerów elektrycznych i wgląd w elektronikę sterującą.
- Letrigo Ebike Knowledge - Wiedza na temat rowerów elektrycznych "Wyjaśnienie okablowania wyświetlacza roweru elektrycznego" - szczegółowe informacje na temat okablowania, złączy (Higo/Julet) i ostrzega, że nie istnieje uniwersalny standard okablowania, podkreślając właściwe dopasowanie połączeń i solidne okablowanie zapewniające integralność sygnału.
- Standard EnergyBus - wprowadzenie od Kvaser - opisujące EnergyBus jako otwarty standard oparty na CANopen dla komponentów LEV w celu zapewnienia kompatybilności i bezpieczeństwa różnych producentów.




