
Електрическите велосипеди (е-велосипеди), включително товарните, разчитат на сложна електрическа система, която свързва батерията, двигателя, контролера, сензорите и потребителския интерфейс. Комуникационните протоколи на тази система служат като "език", който позволява на всички тези компоненти да се координират безпроблемно. В този научнопопулярен преглед ще обясним какво представляват тези комуникационни протоколи и как функционират в електрическите системи на електронните велосипеди. Ще разгледаме видовете използвани протоколи, по какво се различават, къде се прилага всеки от тях, техните предимства и недостатъци, съображения за разходите, съответствие със стандартите за безопасност в ЕС и САЩ и ограничения. Целта е да предоставим ясно, авторитетно ръководство за нашите клиенти и аудитория , като балансираме техническата дълбочина с практическото разбиране.
Ключови компоненти на електрическия велосипед - "нервната система"
Електронните велосипеди могат да се разглеждат като централна нервна система от проводници и връзки за данни, които свързват всички важни компоненти. Точно както нервите пренасят сигналите в тялото, кабелната система пренася сигналите за захранване и данни в мотоциклета . Основните компоненти на типичната електрическа система на електровелосипеда включват:

- Пакет батерии: Източникът на постоянен ток (обикновено 36-48 V), който захранва системата. Свързва се с контролера чрез дебели захранващи кабели (с предпазители или прекъсвачи за безопасност), за да доставя основния ток. Някои усъвършенствани батерии имат и връзка за данни (чрез комуникационни линии) за обмен на сигнали за състояние или управление с контролера.
- Двигател и контролер: Двигателят (главинен двигател в колело или средно задвижване на коляно) получава енергия от контролера на двигателя, който е "мозъкът", регулиращ мощността на двигателя въз основа на данните от ездача и обратната връзка от сензорите. Контролерът е електронен блок с микропроцесор, който приема сигнали (газ, сензор за педалите, спирачки и др.) и управлява захранването на двигателя. Двигателите обикновено имат фазови проводници (тежки кабели, пренасящи захранването) и сензорни проводници (тънки кабели от сензори на Хол, осигуряващи обратна връзка за положението на ротора), които се насочват към контролера.
- Човешки интерфейс (дроселова клапа, сензор за педалите, дисплей): Ездачът комуникира с електронния велосипед чрез устройства като дросела (често дръжка на кормилото със сензор на Хол, който подава променлив сигнал на напрежение, за да поиска скорост) и сензора за подпомагане на педалите (PAS), който засича движението на педалите чрез магнити и сензори. Дисплеят на кормилото показва скоростта, нивото на батерията, нивото на подпомагане и т.н. и често включва бутони, с които водачът може да регулира настройките. Дисплеят и контролерът обменят данни чрез многожичен кабел, включващ захранващи и комуникационни линии .
- Предпазни прекъсвачи (спирачни лостове): Спирачните лостове на електронните велосипеди обикновено имат прекъсвачи, които изпращат сигнал до контролера за незабавно прекъсване на захранването на двигателя при спиране. Обикновено за това се използва проста двупроводна верига, която действа като сигнал за включване/изключване към контролера .
- Осветление и аксесоари: В много електронни велосипеди са вградени предни/задни светлини, клаксон, USB зарядни устройства и др. Те могат да се управляват от главния контролер или да работят на отделни вериги, но при системите от висок клас могат да бъдат адресирани и чрез комуникационната шина.
Подробно ръководство за аксесоари за електрически велосипеди и товарни велосипеди можете да намерите в прочетете тази статия за по-изчерпателен отговор или може би проверете нашите Страница 101 за товарни велосипеди.
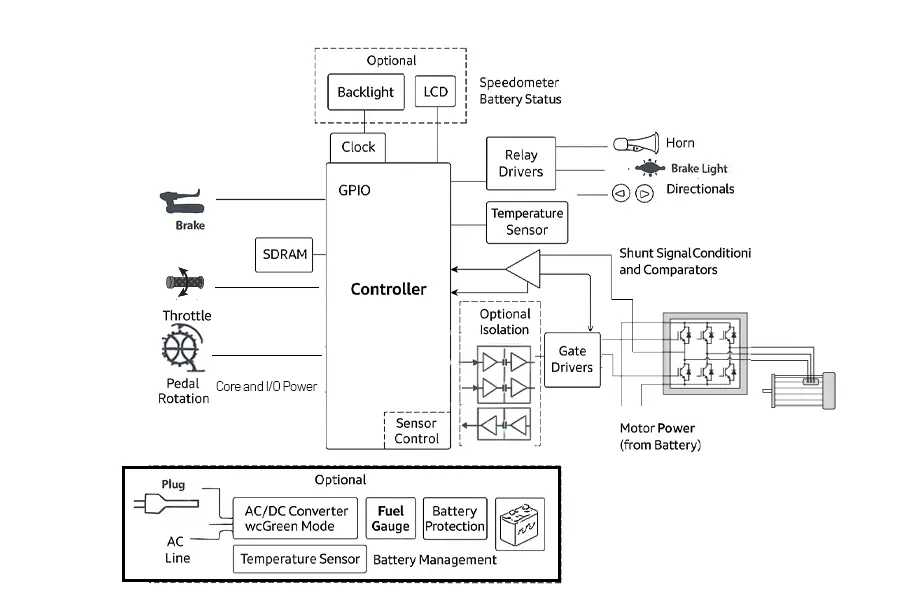
Фигура 2: Блок-схема на типична система за управление на електрически велосипеди и батерии. Централният контролер взаимодейства с ключовите входове - дросела, сензорите на педалите, спирачните лостове - и управлява изходите, като например сигналите за задвижване на мотора, чрез драйвери на гейтове, драйвери на релета и GPIO връзки. Допълнителни модули като LCD дисплеи, зарядни устройства за батерии, манометри за гориво и подсветки разширяват функционалността на системата. Комуникацията между компонентите поддържа координация в реално време на захранването на двигателя, осветлението, предпазните изключвания и наблюдението на състоянието на батерията.
Какви са комуникационните протоколи за електрически велосипеди?
В контекста на електронните велосипеди комуникационните протоколи се отнасят до метода и формата, чрез които електронните компоненти обменят данни. Ранните или базовите електронни велосипеди често не разполагат със сложна цифрова мрежа - много сигнали са аналогови или прости схеми за включване/изключване. Например, дроселът изпраща аналогово напрежение, за да покаже колко мощност иска водачът, а спирачният превключвател просто отваря или затваря верига, за да прекъсне мощността . С усъвършенстването на електронните велосипеди обаче - с интелигентни дисплеи, усъвършенствани сензори и дори с интегриране на GPS или смартфон - възникна необходимост от по-стабилна цифрова комуникация.
Днес в системите за електронни велосипеди преобладават два основни протокола за цифрова комуникация:
- UART (универсален асинхронен приемник-предавател): Метод за серийна комуникация, който създава директна връзка за данни едно към едно между две устройства (обикновено контролер и дисплей).
- CAN Bus (Controller Area Network): Мрежов протокол, който позволява на множество устройства (контролер, дисплей, BMS на батерията, сензори и т.н.) да комуникират по едни и същи общи проводници на шината.
Освен UART и CAN Bus, в системите на електронните велосипеди понякога се използват още два комуникационни протокола:
- SIF (формат на сериен интерфейс): Това е патентован или опростен протокол, който обикновено се среща в някои маркови системи (напр. Shimano STEPS или по-стари дисплеи). Обикновено се използва за основен обмен на данни между контролера и дисплея или дистанционните бутони. Тъй като при SIF липсва отворена стандартизация и гъвкавост, той се ограничава предимно до определени марки или по-стари модели.
- RS-485 (препоръчителен стандарт 485): RS-485 е индустриален протокол за серийна комуникация, известен със своята надеждност и устойчивост на шум при големи разстояния. Въпреки че не е толкова разпространен като UART или CAN в потребителските електронни велосипеди, той се появява в някои системи от висок клас или системи за търговски автопарк, особено когато се изисква здравина и продължително окабеляване - като споделени велосипеди, флотилии за отдаване под наем или тежки електронни велосипеди.
Тези протоколи по същество са "езиците" на електрониката на електронния велосипед. Ако всички компоненти говорят на един и същ език, информацията се предава правилно; ако не, устройствата няма да се разбират помежду си. Ето защо съвпадението на протоколите е от решаващо значение, когато например се свързва дисплей с контролер. Дори ако щепселът пасва, несъвместимостта в протокола означава, че частите няма да работят заедно .
Преглед на използването на пазара (прогнозни тенденции за 2024-2025 г.)
Макар че няма универсално публикувана разбивка на използването на протоколи на пазара на електронни велосипеди, въз основа на информация от индустрията и основните доставчици на системи (напр. Bosch, Bafang, Shimano, Mahle и др.) разумна оценка на разпределението от 2025 г:
| Протокол | Дял на използването (приблизително) | Общи приложения | Бележки |
|---|---|---|---|
| UART | ~50-60% | Електронни велосипеди от начален до среден клас | Широко използвани поради простотата и ниската цена |
| Шина CAN | ~30-35% | Високотехнологични, интелигентни или модулни електронни велосипеди | Увеличаване на приемането с интелигентна интеграция |
| RS-485 | ~5-10% | Системи за автопарк, търговски инсталации с дълги кабели | Ограничени до конкретни случаи на употреба |
| SIF / Proprietary | <5% | Специфични за марката или наследени системи | Срещат се предимно в по-стари или заключени екосистеми |
Забележка: Тези цифри са обобщени за глобалните пазари (ЕС, КН, Северна Ирландия) и се основават на тенденциите на производителите на оригинално оборудване, публичната документация, данните за разглобяване и информацията на доставчиците на компоненти.
Определяне на протоколите за комуникация с електрически велосипеди по по-лесен начин :
Най-просто казано, комуникационните протоколи при електронните велосипеди са следните езици или правила, които позволяват на различните електронни части да разговарят помежду си.. Ако компонентите не говорят на един и същи език, те не могат да се разберат помежду си - дори ако щепселът физически си пасва.
📞 Аналогия: Разговор на четири очи срещу групов чат
Нека си представим два начина на комуникация в ежедневието, за да разберем протоколите на електронните велосипеди:
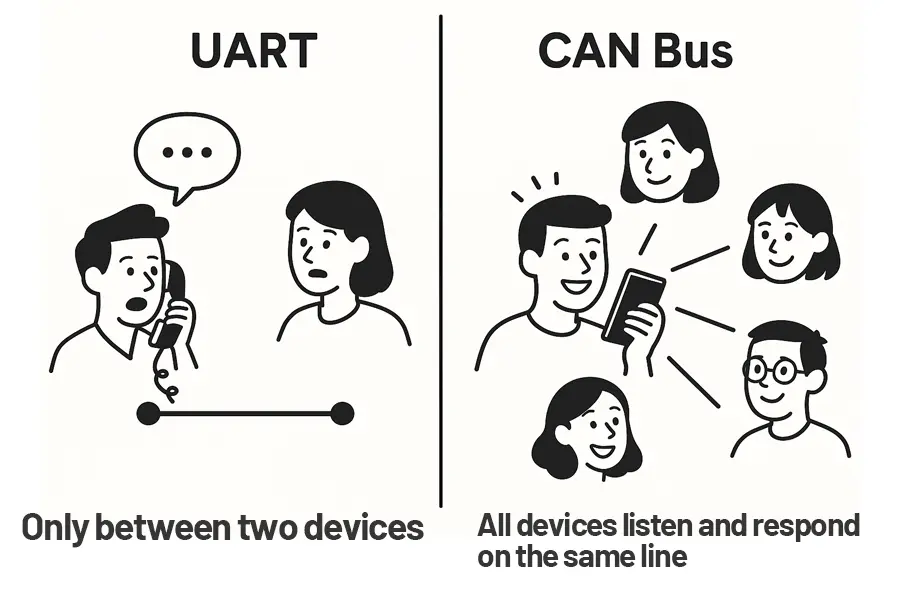
UART: като телефонно обаждане "един на един
- UART (универсален асинхронен приемник-предавател) е като да се обадите на един приятел по телефона.
- Само две устройства могат да говорят едновременно - като дисплея и контролера.
- Ако искате да говорите с друго устройство, трябва друг проводник (или друго телефонно обаждане).
- Това е просто, но не е мащабируемо, когато имате много устройства.
- Често срещано в основни системи за е-велосипеди с ограничени функции.
AN Bus: като групов чат
- CAN Bus (Controller Area Network) е като групов чат в WhatsApp или WeChat.
- Всички устройства (контролер, батерия, дисплей, сензор, осветление) са в една и съща чат стая.
- Всяко съобщение е маркирано с идентификатор на подателя и всяко устройство чете само съобщенията, предназначени за него.
- Това е много по-ефективен и е идеален, когато има много компоненти, които трябва да работят заедно.
- Използва се в интелигентни, усъвършенствани системи за електронни велосипеди, често с GPS, Bluetooth и интеграция с приложения.
| Функция | UART (телефонно обаждане) | CAN Bus (групов чат) |
|---|---|---|
| Вид на връзката | Едно към едно (от точка до точка) | Един към много (споделена шина) |
| Мащабируемост | Нисък - необходими са допълнителни кабели за повече устройства | Висока - няколко устройства използват едни и същи кабели |
| Комуникационен поток | Само между две устройства | Всички устройства слушат и отговарят на една и съща линия |
| Сложност | Прост | По-сложни, но мощни |
| Случай на употреба | Основни електронни велосипеди (само дисплей ↔ контролер) | Интелигентни електронни велосипеди с BMS, приложение, сензори и др. |
Ролята на комуникационните протоколи
Комуникационните протоколи в електронните велосипеди служат за няколко важни цели:
- Споделяне на данни: Те позволяват на контролера да изпраща данни в реално време към дисплея (скорост, състояние на заряда на батерията, кодове за грешки) и да получава обратно команди (напр. промяна на нивото на асистенция, включване/изключване на светлините). Без подходящ протокол може да не получите надеждно отчитане на скоростта или да не успеете да регулирате настройките.
- Координация на компонентите: В усъвършенстваните системи е необходимо да се координират множество микроконтролери. Например интелигентна батерия със собствена система за управление на батерията (BMS) може да комуникира с контролера на двигателя, за да предотврати претоварване по ток или да покаже точния процент на батерията. CAN шина или подобна мрежа позволява на батерията, контролера на двигателя, дисплея и дори на сензорите да обменят информация в мрежа от няколко възела.
- Безопасност и надеждност: Добре разработеният протокол гарантира, че ако има повреда или загуба на сигнал (например повреден кабел), системата може да го открие и да предприеме безопасни действия (например прекъсване на захранването на двигателя). Надеждните протоколи като CAN включват проверка за грешки и приоритизиране на съобщенията, за да се справят с това . При по-простите аналогови сигнали липсва такава обработка на грешки - ако се разхлаби проводник на дроселовата клапа, контролерът може да изтълкува погрешно шума като сигнал за дроселова клапа, освен ако не са предвидени мерки за безопасност.
- Възможност за разширяване: За електронните велосипеди с богата функционалност (GPS проследяващи устройства, имобилайзери против кражба, множество сензори за асистенция и т.н.) комуникационната мрежа улеснява добавянето или премахването на устройства. Вместо всяко ново устройство да се нуждае от специална кабелна връзка с контролера, устройството може да се присъедини към общата шина и да споделя данни с всички останали. Тази мащабируемост е основна причина съвременните електронни велосипеди от висок клас да се насочват към CAN шина .
В обобщение, протоколът за комуникация е гръбнакът на електрическата система на електронния велосипед, който осигурява съгласуваната работа на всички електронни части. В друга публикация ще разгледаме двата основни типа протоколи (UART и CAN), като ще разгледаме начина на работа на всеки от тях и съответните им случаи на използване в електронните велосипеди и товарни електронни велосипеди. проверете, ако се интересувате:
- "Разбиране на UART в електронните велосипеди: Как простата серийна комуникация захранва вашето пътуване"
- Ръководство за начинаещи за това как UART позволява основен обмен на данни между компонентите на електронния велосипед, като дисплеи и контролери.
- "Какво представлява CAN шината в електрическите велосипеди? По-интелигентен начин за свързване на батерии, сензори и др."
- Научете как съвременните електрически велосипеди използват CAN Bus за комуникация с няколко устройства, разширени дисплеи и диагностика на системата.
Сценарии на приложение: Кой комуникационен протокол за кой електровелосипед?
Полезно е да се разбере как UART и CAN се избират на практика за различни проекти на електронни велосипеди. Ще разгледаме две широки категории: потребителски е-велосипеди (включително типични велосипеди за придвижване или за свободното време). и товарни/паркови е-велосипеди (често използвани за бизнес доставки или от автопаркове под наем)., като отбелязва, че те често имат различни приоритети.

- Стандартни потребителски електронни велосипеди (градски, планински, шосейни): Това са велосипедите, които много хора купуват за лична употреба. Те варират от начално ниво до много висок клас. В по-ниския клас (модели, чувствителни към цената) комуникацията UART е изключително разпространена. Например обикновен 36V електрически велосипед за пътуване с датчик за каданс на педалите и основен LED дисплей вероятно използва UART (или дори аналогови сигнали) между контролера и минималния дисплей, който има. Фокусът тук е рентабилност и основна функционалност. Много такива велосипеди използват широко достъпни контролери и дисплеи, които се придържат към фактическия протокол UART, което означава, че марките велосипеди могат да използват компоненти от различни производители на оригинално оборудване. Това е привлекателно за B2B купувачите, които искат гъвкаво да използват, да речем, по-хубав дисплей от доставчик А с контролер от доставчик Б - стига и двата да говорят UART в един и същи формат, това може да работи (въпреки че трябва да се провери съвместимостта на изводите и фърмуера) . При потребителските велосипеди от по-висок клас, особено тези, произведени от големи марки, се наблюдава тенденция към CAN шина. Високопроизводителните е-MTB или е-роуд велосипеди със сензори за въртящ момент и модни дисплеи могат да използват CAN, за да интегрират всичко безпроблемно. Въпреки това някои марки все още използват UART или други собствени серийни връзки дори при велосипеди от висок клас; това зависи от производителя и неговата философия на проектиране.

- Електронни велосипеди за превоз на товари и търговски автопаркове: Електронните велосипеди за превоз на товари са предназначени за превоз на тежки товари или пътници и често се използват от предприятия (служби за доставка, пощенски велосипеди и др.). Тези велосипеди са склонни да дават приоритет на надеждност, безопасност и възможности за управление на автопарка над разходите за електроника. Именно в този сегмент CAN шината наистина се наложи. Например, товарните велосипеди могат да имат двойни батерии за увеличаване на обхвата - управлението на две батерии изисква комуникация за балансиране на разряда или поне за докладване на състоянието на всяка от тях. CAN улеснява комуникацията на един контролер с две BMS устройства (по едно във всяка батерия) по една и съща шина. Товарните велосипеди могат да имат и допълнителни аксесоари: спирачни светлини, мигачи, дори електронни ключалки - координирането им чрез централна шина опростява окабеляването и управлението. Освен това, тъй като товарните електронни велосипеди често се използват в автопаркове, компаниите искат да имат телематика върху тях: GPS проследяващи устройства, които могат да докладват за местоположението на велосипеда, използването му и евентуални повреди. При система, поддържаща CAN, телематичният модул може просто да подслушва CAN съобщенията за скорост, състояние на батерията и т.н. и да качва тази информация. Всъщност едно проучване на случай с европейски автопарк за доставки показа, че включването в CAN шината позволява дистанционно наблюдение на данни за поддръжката (като пробег), дистанционно изключване на двигателя за защита от кражба и актуализиране на фърмуера на велосипеда по въздуха - функции, изключително полезни за управлението на автопарка. Това би било трудно да се реализира в базирания на UART велосипед.
- Смеси и съчетания срещу интегрирани системи: Ако марката на електровелосипеда иска да има свободата да смесва компоненти или да позволява подобрения на вторичния пазар, тя е склонна да се придържа към системи, базирани на UART. Видяхме, че Системите UART позволяват лесна смяна на дисплеите или промяна на настройките на двигателя. Една по-малка компания за електронни велосипеди може да предпочете този начин, за да избегне обвързването с един доставчик - тя може да смени доставчика на двигател/контролер, без да променя цялата екосистема, стига протоколът да остане UART и да може да адаптира фърмуера. От друга страна, марки, фокусирани върху оптимизацията на системата и съответствието, често избират CAN. Например при електронните велосипеди, задвижвани от Bosch, се използва шина, подобна на CAN (Bosch има собствен протокол, базиран на CAN), която свързва двигателя, дисплея и батерията. Това гарантира, че никакви части от трети страни не могат да се намесват; всичко е прецизно настроено заедно. Предимството е в отличната надеждност и безопасност - системата ще обяви грешка, ако нещо не отговаря на спецификациите. Недостатъкът е, че като B2B купувач (като OEM производител на велосипеди, който избира Bosch), вие се ангажирате да закупите двигателя, контролера, батерията, дисплея. всички от Bosch като пакет.
- Товарни велосипеди - специфични съображения: Товарните велосипеди, особено в ЕС, често са подложени на по-строг контрол, тъй като могат да превозват по-тежки товари или дори пътници. В Германия например има стандарт (DIN 79010) специално за безопасността на товарните велосипеди (предимно механични аспекти като здравина на рамката и спирачки). Въпреки че този стандарт не определя протоколите за комуникация, той Начин на мислене, ориентиран към безопасността в товарните велосипеди насърчава използването на протокол, който може да гарантира например, че ако нещо се обърка (прегряване на двигателя или изтощена батерия), системата може да съобщи за това и да предприеме действия. Надеждността на CAN и обработката на грешки помагат за постигането на тези цели за безопасност. Освен това товарните електронни велосипеди често работят в градска среда (доставка в градовете), където има много радио/електрически шум и залогът е голям, ако възникне грешка в комуникацията в неподходящ момент. Сайтът шумоустойчивост на CAN е голям плюс, тъй като предотвратява неразбирателство, което може да доведе до нестабилно поведение.


Стандарти за безопасност и съответствие на електрическата система (ЕС/САЩ)
Независимо от използвания протокол за комуникация, електрическите системи на електронните велосипеди трябва да се придържат към стандартите за безопасност, за да се гарантира, че те работят безопасно и законно, особено на ключови пазари като Европа и САЩ. Комуникационният протокол може косвено да повлияе на съответствието на велосипеда - например протокол, който позволява неограничени модификации от страна на потребителя, може да представлява риск за съответствието, докато такъв, който е заключен, може да помогне да се гарантира, че велосипедът остава в рамките на законовите ограничения. Нека разгледаме съответните стандарти и тяхната връзка:
Как комуникационните протоколи влияят върху съответствието на велосипедите в Европейския съюз
Европейски съюз (ЕС) - EN 15194: В ЕС повечето електронни велосипеди (велосипеди с педална асистенция с мощност на двигателя <= 250 W и прекъсване на асистенцията при 25 km/h) се класифицират като EPACs (Електронно подпомагани цикли). Стандартът EN 15194 се прилага за EPAC и определя изискванията и методите за изпитване на безопасността и експлоатационните характеристики. Това включва механична безопасност (спирачки, рамка и др.) и електрическа безопасност (окабеляване, електромагнитна съвместимост и др.), както и гарантиране, че велосипедът отговаря на ограниченията за скорост и мощност.
- За комуникационните протоколи един от важните аспекти е електромагнитна съвместимост (EMC): Системата не трябва да излъчва прекомерни смущения или да бъде неправомерно засегната от смущения. Добре проектираната комуникационна линия CAN или UART трябва да премине успешно тестовете за електромагнитна съвместимост (EN 15194 препраща към EN 55014 или подобен стандарт за електромагнитна съвместимост). На адрес шумоустойчивост на CAN може да бъде предимство при изпълнението на тези изисквания за ЕМС, тъй като по своята същност се справя по-добре с шума, но UART системите също могат да отговарят на изискванията, ако са правилно екранирани.
- Подправяне на скоростта и мощността: Стандартът EN 15194 изисква асистентът да се изключва при 25 км/ч и потребителят да не може лесно да регулира тази граница над законовата стойност. Ако велосипедът използва UART и производителят остави достъпни подложки за програмиране, потребителят може да евентуално да го ограничите - това може да доведе до проблеми със спазването на законодателството. Затова някои производители използват заключени CAN системи, за да попречат на потребителите да променят ограничението на скоростта. Например, при CAN-базираните двигатели на Bafang ограничението на скоростта е фиксирано и не може да се променя чрез дисплея , което помага да се гарантира съответствие с нормативните изисквания още от самото начало. За разлика от тях, при много UART системи, опитният потребител може да влезе в режим на настройки на дисплея и да промени размера на колелото или ограничението, или да използва кабел за програмиране, което може да наруши буквата на закона, ако накара мотора да надвиши 25 км/ч.
- Електрическа безопасност: Стандартът EN 15194 (последни изменения) обхваща основните аспекти на електрическата безопасност, но интересното е, че не покрива напълно безопасността на батерията - това предполага, че самият акумулаторен блок трябва да отговаря на други стандарти. Той се фокусира повече върху интеграцията, окабеляването и основната защита (като липса на открити части под напрежение и т.н.). Комуникационният протокол не оказва пряко влияние върху това, но косвено протокол като CAN, който позволява на BMS да разговаря с контролера, може да повиши безопасността - например BMS може да изпрати команда "спрете разряда", ако батерията прегрява. Макар и да не се изисква от стандарта EN 15194, подобна функция помага на велосипеда да отговори на общите очаквания за безопасност (избягване на събития, свързани с топлинно изтичане).
Освен това европейските товарни електронни велосипеди (особено тези, които превозват стоки/пътници) може да трябва да отговарят на Директива за машините ако те не попадат в обхвата на правилата за велосипеди (някои тежки товарни велосипеди попадат в този обхват). Това отново набляга на надеждните защити при повреда. Използването на солиден протокол за комуникация с поведение, предпазващо от повреда (като изключване на CAN при повреда), може да подпомогне спазването на изискванията тук.
Повече информация за Стандарт на ЕС за електронен велосипед
Как комуникационните протоколи влияят върху съответствието на велосипедите в САЩ
САЩ - UL 2849 и други: В САЩ производството на е-велосипеди е малко по-слабо регулирано на федерално ниво по отношение на производителността (има определение за потребителски продукт за нискоскоростен е-велосипед като 750 W макс. и 20 мили в час при подаване на газ/28 мили в час при подпомагане на педалите, но няма задължителни стандарти за конструкцията на федерално ниво). Въпреки това, сертифицирането за безопасност става решаващо, особено поради опасения за пожар от батериите.
- UL 2849 е основният стандарт за безопасност на електрическите системи на електронните велосипеди в Северна Америка. Той обхваща цялата електрическа система за задвижване на електровелосипеда - включително батерията, двигателя, зарядното устройство и всички взаимовръзки. Тестването по UL 2849 разглежда неща като това дали окабеляването може да поеме токовете, дали системата е защитена от къси съединения и, което е важно, включва също UL 2271 за батерии (който е специфичен за батериите стандарт за безопасност). По отношение на комуникацията UL 2849 не предписва протокол, но ще провери дали например при загуба на комуникация или откриване на повреда системата не се поврежда безопасно (без топлинни събития, без бягство на двигателя). Една система, базирана на CAN, може да има леко предимство при доказване на резервираност (например, ако съобщението за дроселовата клапа се загуби, CAN може да открие това и да спре по подходящ начин). Но дори UART системите могат да бъдат проектирани така, че да отговарят на изискванията на UL 2849 (те просто се нуждаят от задълбочена обработка на неизправностите във фърмуера на контролера).
- Предотвратяване на пожар и електрически удар: Стандарти като UL 2849 се фокусират върху предотвратяването на електрически пожари и токови удари. Например, ако към електронния велосипед е свързано зарядно устройство, комуникацията между батерията и зарядното устройство (ако има такава) не трябва да води до презареждане. Забележително е, че Стандарт EnergyBus която споменахме, и която е базирана на CAN, беше отчасти мотивирана от безопасността - да се гарантира, че всяко зарядно устройство може безопасно да зарежда всяка батерия, като комуникира по CANopen и разрешава захранване само когато е извършено правилното ръкостискане. EnergyBus използва специфичен конектор, който включва CAN линии за данни, така че зарядното устройство и батерията първо да установят комуникация, а след това да разрешат зарядния ток, за да се избегнат искри или несъответстващи напрежения . Тази концепция е в съответствие с логиката за безопасност на UL. Ако дадена марка използва EnergyBus, това вероятно помага за преминаването на сертификати за безопасност, тъй като по своята същност управлява безопасното взаимодействие между компонентите.
- Съответствие с нормативните изисквания (скорост/мощност): В САЩ системата на класовете (е-байкове от класове 1, 2 и 3) е до голяма степен почетна и не се прилага толкова стриктно, колкото ограниченията в ЕС, но поради причини, свързани с отговорността, производителите обикновено гарантират, че е-байк, продаван като клас 2, не може лесно да бъде променен, за да надхвърли 20 мили в час с газ, например. И тук използването на затворен CAN протокол може да помогне - потребителите не могат просто да включат кабел и да намалят ограниченията върху велосипеда. Забележително е, че много компании за електронни велосипеди вече рекламират батерии или системи, сертифицирани от UL, за да гарантират безопасността на клиентите. Например HOVSCO (както се вижда от тяхната база данни) подчертава, че техните велосипеди отговарят на изискванията на UL 2849 за електрическа безопасност и на EN 15194 за цялостно съответствие с изискванията за безопасност . Това означава, че техните кабели, съединители и комуникации трябва да функционират, без да създават опасности.
Международни и други стандарти: Освен EN 15194 и UL 2849 има и други подходящи стандарти - напр., ISO 4210 (стандарт за безопасност на велосипедите) с част, която обхваща изискванията за електронните велосипеди, и германския ДИН 79010 за товарни велосипеди (която, както отбелязахме, обхваща неща като здравина на рамката при товарни натоварвания и спирачна ефективност). Те не определят пряко електрониката, но стандартът за товарни велосипеди може да изисква, например, асистенцията да не се поврежда при голямо натоварване. Надеждната комуникация гарантира, че дори ако велосипедът се натоварва (и може би се повишава електрическият шум или батерията провисва), сигналите между батерията, контролера и сензорите остават надеждни.
В обобщение, съответствието и безопасността определят някои решения за проектиране между UART и CAN. Производител, който се стреми към максимална безопасност, може да се насочи към CAN за проверка и контрол на грешките или да приложи допълнителни предпазни мерки в UART системите. И двата протокола могат да бъдат част от безопасен проект, но начинът на използването им е от ключово значение. На адрес затвореният характер на системите CAN може да наложи спазване на изискванията (напр. ограничения на скоростта, които не могат да се регулират от потребителите, както се изисква по закон) , докато Системите UART предлагат по-голяма свобода на потребителя, което е нож с две остриета. Производителите трябва да гарантират, че дори базираните на UART мотоциклети имат нещо като физически или софтуерен ограничител, който не може да бъде лесно хакнат, за да останат в рамките на законовите ограничения.
И накрая, независимо от протокола, използването на качествени съединители и окабеляване е част от спазването на изискванията. В ЕС мотоциклетът трябва да издържа на вибрации, без да се разхлабват проводници, и на мокри условия, без да се къса. Съединители като Higo/Julet (водоустойчиви съединители, широко използвани в електронните велосипеди) са популярни не само заради удобството, но и защото помагат за спазването на Класификация IP и изисквания за надеждност. Обикновено CAN шината използва такива конектори (например един 4- или 5-пинов Higo може да пренася CAN данните и захранването на дисплея). Изборът на протокол не променя необходимостта от добра облекчаване на напрежението, изолация и заключващи конектори за да се предотврати прекъсване на връзката (което може да бъде опасно, ако например сигналът за спиране на спирачките не достигне до контролера поради разхлабване на кабела).
В заключение на този раздел искам да кажа, че както в Европа, така и в САЩ понастоящем се обръща голямо внимание на безопасността на електронните велосипеди. Съответствието със стандарти като EN 15194 и UL 2849 все повече не подлежи на обсъждане от страна на реномираните марки. Комуникационният протокол е една част от пъзела - средство, което гарантира, че електрическата система е координирана и безотказна. Надеждността на CAN шината може да помогне за спазването на тези стандарти, като осигури надеждна комуникация, докато UART системите изискват внимателно проектиране, за да бъдат също толкова безопасни. Производителите често избират протокола, който най-добре съответства на стратегията за съответствие: UART за по-прости проекти, при които рискът може да бъде управляван лесно, или CAN за сложни системи, при които функциите за безопасност се отличават.
Разходи и пазарни съображения при избора на комуникационни протоколи
При вземането на решение за избор между комуникационни протоколи (или като цяло при проектирането на електрическата система на електронния велосипед) разходите са важен фактор - не само паричните разходи, но и "разходите" по отношение на гъвкавостта и взаимоотношенията с доставчиците. Ето как се сравняват разходите и какво вземат предвид купувачите или инженерите на B2B:
- Разходи за хардуер: Както беше отбелязано по-рано, в системата, базирана на UART, обикновено се използва по-опростен хардуер. Контролерът и дисплеят се нуждаят само от възможност за UART, която е вградена в почти всички микроконтролери. Окабеляването може да е малко по-просто (по-малко съображения за терминиране и т.н.). Системата, базирана на CAN, изисква малко повече: CAN приемо-предавателен чип за всяко устройство и евентуално по-мощен MCU (въпреки че в наши дни дори доста евтини MCU имат вграден CAN). Действителната разлика в цената на материалите (BOM) може да бъде от порядъка на няколко долара за велосипед в голям обем, но на конкурентен пазар това все още е от значение. При поръчка на голям парк от велосипеди тези долари се умножават многократно. Това означава, че разходите за хардуер на CAN са намалели. значително, а компромисът може да бъде лесно оправдан от допълнителната функционалност, която CAN предоставя.
- Разходи за разработване и интегриране: Разработването на система, базирана на CAN, от нулата може да бъде скъпо за стартиращи фирми за електронни велосипеди или малки компании, ако те не разполагат със собствен опит. Може да се наложи да се наемат инженери по вградени системи, запознати с CAN, да се инвестира в инструменти и да се отдели време за разработване на персонализиран фърмуер. Алтернативно, ако закупят готова система (като например задвижващите устройства на Bosch или Shimano, които са базирани на CAN), разходите за разработване от тяхна страна са по-ниски, но цената на единицата е по-висока (системите на Bosch са на по-висока цена, отчасти защото получавате напълно интегрирано решение и марката). A Системата UART често може да бъде сглобена с готови компоненти с известна съвместимост - например, много компании използват протоколи с отворен код или стандартни протоколи, при които голяма част от инженерните дейности вече са извършени и рискът е по-малък. За купувач от типа B2B (например компания, която иска да има няколко електронни велосипеда под своя марка), преминаването към UART може да означава, че може да се снабди с по-евтини генерични части, докато преминаването към CAN често означава приспособяване към екосистемата на определен доставчик (който може да изисква лицензиране или по-високи цени).
- Разходи за следпродажбено обслужване и поддръжка: Това понякога се пренебрегва. Оператор на автопарк (като компания за споделяне на велосипеди или компания за доставки) може да установи, че Мотоциклетите с шина CAN спестяват средства за поддръжка. Защо? Защото те могат да диагностицират проблемите от разстояние или по-бързо. Свързаната с CAN система може да докладва подробно кодовете за грешки (например "неизправност на температурния сензор на акумулатора #2" като конкретен код). Техниците могат да включват диагностични инструменти към CAN шината, за да установят точно проблемите. Това може да намали времето за работа. Също така, както се вижда в случая с IoT Venture, са възможни неща като дистанционни актуализации на фърмуера , което може да спести разходи за физическо извикване на велосипеди за определени поправки. От друга страна, първоначалната поддръжка на велосипед с UART може да бъде по-проста (може би по-малко неща, които да се объркат в комуникациите), но ако нещо не е наред, може да се наложи да се прави подмяна на части по метода на пробите и грешките, тъй като системата не може да ви каже какво точно не е наред, освен че може би мига светодиод. За индивидуалния потребител ремонтът на велосипед с UART може да е по-евтин, тъй като може да използва готови части и знания на общността, за да го поправи, докато велосипед с CAN може да го принуди да отиде в оторизиран сервиз (потенциално по-скъп). Така че е налице компромис между разходите за възможност за обслужване от страна на потребителя (UART победи) и разширена диагностична поддръжка (CAN печели, което може да намали разходите за професионални услуги).
- Разходи за лицензиране и патентоване: Използването на патентован протокол CAN може да бъде свързано с лицензионни такси или ограничения. Ако дадена марка велосипеди разработи свой собствен CAN протокол, това е добре, но ако използва нещо като CANopen или EnergyBus, може да се наложи да се придържа към стандарти и евентуално да се присъедини към асоциации (напр. EnergyBus e.V.). Тези разходи обикновено са малки, но си струва да бъдат отбелязани. Патентованите системи, като тази на Bosch, на практика означават, че производителят на велосипеди купува задвижващите устройства като пакет; Bosch определя цената. При UART системите често има по-голяма конкуренция между доставчиците на части, което може да доведе до намаляване на цените.
- Възприемане на клиентите и стойност: От маркетингова гледна точка марката може да оправдае по-високата цена за велосипед, който има "електроника с CAN шина от автомобилен клас", тъй като това звучи модерно и надеждно (дори ако клиентът не вижда директно разликата). Има стойност в първокласно усещане и производителност с които често са снабдени системите CAN (обикновено те са на велосипеди, които имат и висококачествени двигатели и т.н.). Така че марките, насочени към пазара от по-висок клас или към търговските клиенти, могат да използват CAN като част от премиум предложение. Обратно, при електронните велосипеди от начално ниво клиентите се интересуват най-вече от това, че системата работи и е достъпна - те няма да плащат допълнително само защото дисплеят на велосипеда използва CAN вместо UART. И така, изборът на протокол трябва да съответства на пазарния сегмент на велосипеда..
- Подсигуряване на бъдещето: Разходите, които инженерите отчитат, са алтернативните разходи от липсата на устойчивост към бъдещето. Ако сега инвестирате в платформа, базирана на UART, но през следващата година искате да добавите повече функции (например втора батерия или нов тип сензор), може да се окаже, че старата платформа е ограничаваща, което ще наложи препроектиране. Някои компании решават, че е по-рентабилно в дългосрочен план да използват CAN от самото начало, дори и да не се използва напълно, за да оставят място за нови функции и аксесоари. Това може да спести разходи за преработване по пътя. Това е стратегическо решение: да платите малко повече в началото срещу потенциално много повече по-късно за надграждане.
Що се отнася до действителните ценови стойности: трудно е да се определи, но един вътрешен човек от индустрията може да каже, че например основен UART контролер за електронен велосипед + комплект дисплей може да бъде, да речем, $50-$100 в насипно състояние, докато еквивалентен CAN-базиран комплект от голяма марка може да бъде няколкостотин долара (защото е по-сложен). Тази разлика обаче често включва и по-добри характеристики на двигателя, гаранция и т.н., а не само разликата в комуникацията. На допълнителни разходи само за протокола (напр. добавяне на CAN чип) е малък, но разходи за екосистемата (свързване със скъпа система спрямо евтина генерична система) може да бъде голям.
Казано по-ясно за купувач на B2B електронен велосипед:
- Ако вашият приоритет е най-ниски разходи за единица продукт и искате гъвкавост при снабдяването с продукти от различни доставчици. Отворена система, базирана на UART е привлекателен. Можете да се огледате за подходящи дисплеи и контролери, като дори можете да преговаряте с няколко фабрики.
- Ако вашият приоритет е производителност, надеждност и система "до ключ". (и сте готови да платите за това), Система, базирана на CAN, от утвърден доставчик може да ви спести главоболия и да добави стойност към вашия продукт (при по-високи разходи, които, надяваме се, ще възстановите чрез по-високи цени на велосипедите си или чрез ефективност на обема).
Ограничения и бъдещи тенденции
Въпреки че възхваляваме достойнствата на UART и CAN, си струва да отбележим ограничения на текущото състояние на комуникациите при електронните велосипеди и накъде може да се насочат нещата:
- Липса на стандартизация в цялата индустрия: За разлика от автомобилния свят, където почти всеки автомобил използва CAN шина и стандартизирана диагностика (OBD-II), индустрията на електронните велосипеди все още е фрагментирана. Съществува няма единен универсален протокол които се използват във всички електронни велосипеди. Реализациите на UART се различават (всеки производител може да има различни формати за данни през UART), а реализациите на CAN често са патентовани. Това е ограничение за потребителите и производителите на велосипеди - не е възможно да се "включи и използва" между различни марки. Не можете да вземете произволен дисплей и да очаквате, че той ще работи с произволен контролер, освен ако те изрично не използват един и същ протокол и фърмуер. EnergyBus е обещаващо усилие за стандартизация (с CANopen CiA-454, определящ съобщения за компоненти на електронни велосипеди) , но все още не е широко разпространен. Ако EnergyBus или други подобни стандарти наберат популярност, може да видим наистина оперативно съвместими компоненти - например батерия от производител X може да се използва с моторна система от производител Y, като протоколът, базиран на CANopen, гарантира, че те се разбират помежду си. Това би било от полза за купувачите B2B (повече възможности за избор на доставчик) и за потребителите (повече възможности за модернизация/ремонт). Участниците в отрасъла обаче имат и бизнес мотиви да поддържат патентовани системи (за да задържат клиентите си). Напрежението между стандартизация срещу контрол на собствеността ще определи бъдещето на протоколите за електронни велосипеди.
- Нужди от честотна лента и данни: Понастоящем съобщенията за електронни велосипеди са с относително малко данни. Но бъдещите електронни велосипеди могат да предават повече информация - представете си, че събирате данни от високочестотни сензори за въртящ момент или данни за мощността с висока разделителна способност за целите на обучението, или дори видео от камери за безопасност. CAN при класическите скорости може да се превърне в тясно място, ако трябва да се изпращат много данни. Автомобилната индустрия разполага с CAN-FD (разширена версия на CAN с по-големи рамки за данни и по-висока пропускателна способност) и други протоколи като Ethernet за нуждите от висока пропускателна способност. За електронните велосипеди може да се появи CAN-FD, ако е необходимо, или BLE/Wi-Fi за разтоварване на протоколи с данни. Безжична комуникация може да допълни и кабелните протоколи: вече много електронни велосипеди използват Bluetooth Low Energy за свързване на велосипеда с приложение за смартфон. Това е извън обхвата на вътрешната електрическа система, но си струва да се отбележи като паралелен канал. Може би в бъдеще някои по-прости електронни велосипеди ще се откажат дори от жичен дисплей и ще използват безжичен модул към телефон - въпреки че критичните контролни функции (като сигналите за газта или спирачката) вероятно ще останат жични заради надеждността. В товарните автопаркове може да се наблюдава по-широка интеграция на комуникацията V2X (vehicle-to-everything - превозно средство-всичко) - е-велосипеди, които се свързват с логистични системи или пътна инфраструктура, което отново ще бъде наложено върху основната система на CAN шината.
- Загриженост за сигурността: Тъй като електронните велосипеди стават все по-свързани и използват по-сложна комуникация, киберсигурност става проблем. Системата UART без външна свързаност на практика е защитена от хакерски атаки (някой би трябвало физически да подслушва кабелите). Но CAN шина, която се свързва с Bluetooth модул или GSM модул (за проследяване на автопарка), въвежда потенциални уязвимости. Производителите ще трябва да гарантират, че техните протоколи (особено безжичните интерфейси към шината) са защитени, за да се предотврати злонамерен контрол (представете си хакване на IoT, което може да деактивира дистанционно флотилия от велосипеди за доставка - далечен, но теоретично възможен сценарий, ако не е защитен). Собствените протоколи по своята същност са донякъде защитени чрез неяснота, но тъй като CAN става общоизвестен в електронните велосипеди, лошите участници биха могли да се опитат да инжектират CAN съобщения чрез открит порт. Затова в бъдеще може да се появи повече криптиране или удостоверяване на автентичността в комуникациите на електронните велосипеди.
- Потребителски опит: В крайна сметка, независимо от използвания протокол, той трябва да осигурява добро потребителско преживяване. Водачите се интересуват от неща като плавно подаване на енергия, точна информация на дисплея и функции за безопасност, които работят, когато е необходимо. Ограничението на ранните системи, базирани на CAN, беше, че те понякога бяха твърде заключени - потребителите се чувстваха разочаровани, че не могат да променят дори прости предпочитания. С усъвършенстването на системите производителите могат да намерят начини да предоставят на потребителите гъвкавост (чрез оторизирани приложения или настройки), без да нарушават контрола. Например, може би едно приложение би могло да позволи ограничена настройка (в рамките на безопасните граници) дори в система CAN или да позволи на аксесоари от трети страни, които са сертифицирани, да комуникират по шината (може би използвайки стандартни съобщения EnergyBus). Можем да очакваме малко повече отвореност със стандартизирането на протоколите, по ирония на съдбата дори в света на CAN.
В заключение електрическата комуникационна система на електронните велосипеди - UART или CAN - е от решаващо значение за производителността, безопасността и модулността на велосипеда. Инженерите, проектиращи електронни велосипеди, трябва да балансират между простотата на UART и сложността на CAN. Купувачите на B2B трябва да вземат предвид как изборът влияе върху разходите, веригата за доставки и стойностното предложение на техния продукт. Изглежда, че индустрията се ориентира към CAN шината, тъй като електронните велосипеди се превръщат в по-свързани и способни машини , но системите, базирани на UART, вероятно ще останат паралелни за по-простите и евтини модели за известно време (в края на краищата те са "достатъчно добри" за огромен сегмент от велосипедисти).
Чрез разбирането на тези комуникационни протоколи - по същество електрически език на електронните велосипеди - човек получава много по-дълбока представа за вътрешното функциониране на електронния велосипед. От завъртането на газта или натиска върху педалите до мощността на двигателя и цифрите на дисплея - всичко това се осъществява с помощта на битове и байтове, които се движат по кабелите и гарантират, че батерията, двигателят и водачът са синхронизирани.. И независимо дали става въпрос за елегантен градски електромобил или за тежкотоварен автомобил за превоз на товари, тази хармония прави пътуването безпроблемно и безопасно. В крайна сметка целта на всеки протокол е да направи така, че технологията да остане на заден план, така че водачите да могат просто да се наслаждават на пътуването - но сега, надяваме се, с малко повече информация за впечатляващата електронна координация, която се случва под краката им.
Източници:
- Ръководство за електрически велосипеди Qiolor - "Как да изберем съвместим дисплей за вашия контролер за велосипед" (2025) - обсъждане на езиците UART срещу CANBUS и значението на съвпадащите протоколи.
- Velco.tech - "CAN срещу UART: разлики между режимите на комуникация" (2024) - обяснение на простотата на UART срещу мрежовите възможности на CAN и изброяване на техните предимства/ограничения.
- Център за помощ на Biktrix - "Какви са протоколите CANBUS и UART?" - ориентиран към потребителя поглед върху начина, по който CAN блокира настройките (фиксирано ограничение на скоростта) спрямо UART, позволяващ модификации, плюс сравнение на взаимозаменяемостта на дисплея.
- IoT Venture (Проучване на случай с флота на CYCLE) - описание на ползите от интегрирането на CAN във флота от електронни велосипеди: достъп до данни за поддръжка, дистанционно изключване на двигателя, OTA актуализации.
- Знания за HOVSCO - "Какви функции за безопасност имат електрическите велосипеди?" - бележки за EN 15194 (ЕС), гарантиращ ограниченията на скоростта/мощността и издръжливостта, и за UL 2849 (САЩ) с акцент върху електрическата/пожарната безопасност, както и споменаване на DIN 79010 за безопасност на товарните велосипеди.
- Тексаски инструменти App Note - "Съображения за проектиране на хардуер за електрически велосипед, използващ BLDC мотор" - предостави типични блокови схеми на системи за електрически велосипеди и представа за електрониката за управление.
- Letrigo Ebike Знания - "Обяснено окабеляване на дисплея на електронния велосипед" - Подробности за окабеляването, съединителите (Higo/Julet) и предупреждава, че не съществува универсален стандарт за окабеляване, като подчертава правилното съчетаване на връзките и надеждното окабеляване за целостта на сигнала.
- Стандарт EnergyBus - Въведение от Kvaser - описва EnergyBus като отворен стандарт, базиран на CANopen, за компоненти на LEV, за да се гарантира съвместимост и безопасност при различните производители.




