
Elektrofahrräder (E-Bikes), auch Lasten-E-Bikes, sind auf ein komplexes elektrisches System angewiesen, das Batterie, Motor, Steuergerät, Sensoren und Benutzerschnittstelle miteinander verbindet. Die Kommunikationsprotokolle dieses Systems dienen als "Sprache", die es all diesen Komponenten ermöglicht, nahtlos zusammenzuarbeiten. In diesem populärwissenschaftlichen Überblick werden wir erklären, was diese Kommunikationsprotokolle sind und wie sie in elektrischen Systemen von E-Bikes funktionieren. Wir behandeln die Arten der verwendeten Protokolle, wie sie sich unterscheiden, wo sie eingesetzt werden, ihre Vor- und Nachteile, Kostenüberlegungen, die Einhaltung der Sicherheitsstandards in der EU und den USA sowie Einschränkungen. Ziel ist es, unseren Kunden und Zuhörern einen klaren, maßgeblichen Leitfaden an die Hand zu geben, der technische Tiefe mit praktischem Verständnis verbindet.
E-Bike Schlüsselkomponenten - Das "Nervensystem"
E-Bikes können als ein zentrales Nervensystem aus Kabeln und Datenverbindungen betrachtet werden, das alle wichtigen Komponenten miteinander verbindet. Genauso wie die Nerven im Körper Signale übertragen, überträgt der Kabelbaum sowohl Strom- als auch Datensignale über das Fahrrad. Zu den wichtigsten Komponenten eines typischen elektrischen Systems eines E-Bikes gehören:

- Batteriepack: Die Gleichstromquelle (in der Regel 36-48 V), die das System mit Energie versorgt. Sie ist über dicke Stromkabel (mit Sicherungen oder Unterbrechern zur Sicherheit) mit dem Steuergerät verbunden, um den Hauptstrom zu liefern. Einige moderne Batterien verfügen auch über eine Datenverbindung (über Kommunikationsleitungen), um Status- oder Steuersignale mit dem Steuergerät auszutauschen.
- Motor und Steuerung: Der Motor (Nabenmotor in einem Laufrad oder Mittelantrieb an der Kurbel) wird vom Motorcontroller mit Strom versorgt, dem "Gehirn", das die Motorleistung auf der Grundlage von Fahrereingaben und Sensorfeedback regelt. Der Controller ist eine elektronische Einheit mit einem Mikroprozessor, der Signale (Gaspedal, Pedalsensor, Bremsen usw.) entgegennimmt und die Stromversorgung des Motors steuert. Motoren haben in der Regel Phasenkabel (schwere Kabel für die Stromversorgung) und Sensorkabel (dünne Kabel von Hall-Effekt-Sensoren, die eine Rückmeldung der Rotorposition liefern), die zum Steuergerät führen.
- Menschliche Schnittstelle (Gaspedal, Pedalsensor, Display): Der Fahrer kommuniziert mit dem E-Bike über Geräte wie den Gashebel (oft ein Lenkergriff mit einem Hall-Effekt-Sensor, der ein variables Spannungssignal zur Geschwindigkeitsanforderung ausgibt) und den Pedalunterstützungssensor (PAS), der die Tretbewegung über Magnete und Sensoren erfasst. Das Display am Lenker zeigt die Geschwindigkeit, den Batteriestand, die Unterstützungsstufe usw. an und enthält häufig Tasten, mit denen der Fahrer die Einstellungen vornehmen kann. Das Display und das Steuergerät tauschen Daten über ein mehradriges Kabel aus, das Strom- und Kommunikationsleitungen enthält.
- Sicherheitsabschaltungen (Bremshebel): E-Bike-Bremshebel sind in der Regel mit Abschaltschaltern ausgestattet, die ein Signal an das Steuergerät senden, um die Motorleistung beim Bremsen sofort zu unterbrechen. Typischerweise wird hierfür eine einfache Zweidrahtschaltung verwendet, die als Ein-/Aus-Signal an den Controller dient.
- Beleuchtung und Zubehör: Viele E-Bikes verfügen auch über Front- und Rücklicht, Hupe, USB-Ladegeräte usw. Diese können vom Hauptsteuergerät gesteuert werden oder auf separaten Schaltkreisen arbeiten, aber in High-End-Systemen können sie auch über den Kommunikationsbus angesprochen werden.
Einen ausführlichen Leitfaden für Zubehör für E-Bikes und Lastenräder finden Sie unter Lesen Sie diesen Artikel für eine ausführlichere Antwort oder vielleicht unser Cargo Bike 101 Seite.
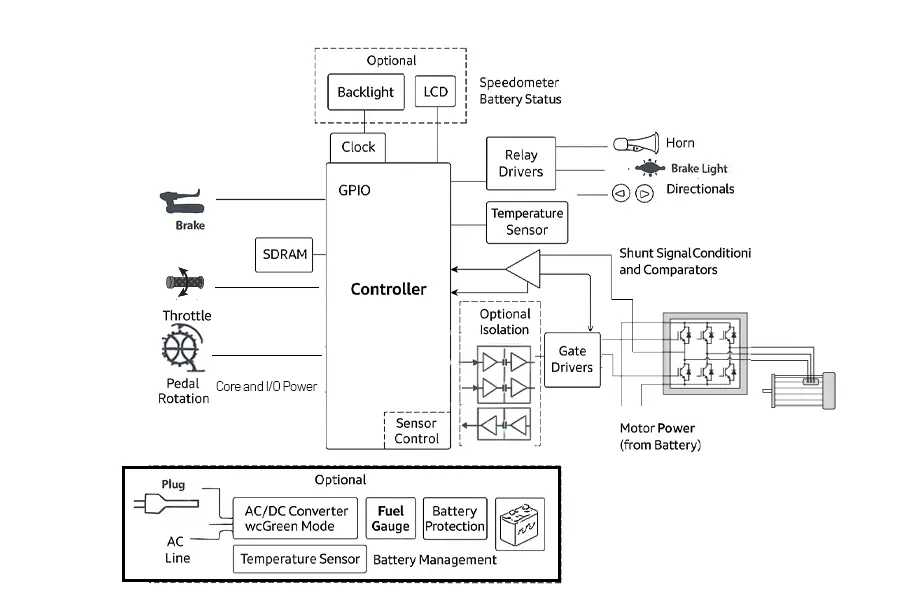
Abbildung 2: Blockdiagramm eines typischen Steuerungs- und Batteriemanagementsystems für Elektrofahrräder. Die zentrale Steuerung ist mit den wichtigsten Eingängen - Gashebel, Pedalsensoren, Bremshebel - verbunden und verwaltet Ausgänge wie Motorantriebssignale über Gattertreiber, Relaistreiber und GPIO-Verbindungen. Optionale Module wie LCD-Anzeigen, Batterieladegeräte, Kraftstoffanzeigen und Hintergrundbeleuchtungen erweitern die Systemfunktionalität. Die Kommunikation zwischen den Komponenten unterstützt die Echtzeitkoordination von Motorleistung, Beleuchtung, Sicherheitsabschaltungen und Batteriestatusüberwachung.
Was sind E-Bike Kommunikationsprotokolle?
Im Zusammenhang mit E-Bikes beziehen sich die Kommunikationsprotokolle auf die Methode und das Format, mit denen elektronische Komponenten Daten austauschen. Frühe oder einfache E-Bikes verfügten oft nicht über ein komplexes digitales Netzwerk - viele Signale waren analog oder einfache Ein/Aus-Schaltungen. So sendet z. B. eine Drosselklappe eine analoge Spannung, um anzuzeigen, wie viel Leistung der Fahrer wünscht, und ein Bremsschalter öffnet oder schließt einfach einen Stromkreis, um die Leistung zu verringern. Da E-Bikes jedoch immer ausgereifter wurden - mit intelligenten Displays, fortschrittlichen Sensoren und sogar GPS- oder Smartphone-Integration - entstand ein Bedarf an robusterer digitaler Kommunikation.
Heute dominieren zwei primäre digitale Kommunikationsprotokolle die E-Bike-Systeme:
- UART (Universal Asynchronous Receiver-Transmitter): Eine serielle Kommunikationsmethode, die eine direkte Eins-zu-Eins-Datenverbindung zwischen zwei Geräten herstellt (in der Regel Controller und Display).
- CAN-Bus (Controller Area Network): Ein Netzwerkprotokoll, das es mehreren Geräten (Steuergerät, Display, Batterie-BMS, Sensoren usw.) ermöglicht, über dieselben gemeinsamen Busleitungen zu kommunizieren.
Neben UART und CAN-Bus werden in E-Bike-Systemen gelegentlich zwei weitere Kommunikationsprotokolle verwendet:
- SIF (Serielles Schnittstellenformat): Hierbei handelt es sich um ein proprietäres oder vereinfachtes Protokoll, das häufig bei bestimmten Markensystemen (z. B. Shimano STEPS oder älteren Anzeigegeräten) zu finden ist. Es wird in der Regel für den grundlegenden Datenaustausch zwischen dem Controller und dem Display oder den Remote-Tasten verwendet. Da es SIF an offener Standardisierung und Flexibilität mangelt, ist es meist auf bestimmte Marken oder ältere Modelle beschränkt.
- RS-485 (empfohlener Standard 485): RS-485 ist ein industrielles serielles Kommunikationsprotokoll, das für seine Langstreckenzuverlässigkeit und Störungsresistenz bekannt ist. Obwohl es nicht so häufig wie UART oder CAN in E-Bikes für Verbraucher verwendet wird, kommt es in einige High-End- oder kommerzielle FlottensystemeBesonders dort, wo Robustheit und eine längere Verkabelung erforderlich sind, wie bei gemeinsam genutzten Fahrrädern, Mietflotten oder hochbelasteten E-Bikes.
Diese Protokolle sind im Wesentlichen die "Sprachen" der Elektronik des E-Bikes. Wenn alle Komponenten die gleiche Sprache sprechen, fließen die Informationen korrekt, andernfalls verstehen sich die Geräte gegenseitig nicht. Deshalb ist die Abstimmung des Protokolls entscheidend, wenn beispielsweise ein Display mit einem Steuergerät gekoppelt wird. Selbst wenn der Stecker passt, bedeutet eine Inkompatibilität im Protokoll, dass die Teile nicht zusammen funktionieren.
Überblick über die Marktnutzung (geschätzte Trends 2024-2025)
Es gibt zwar keine allgemein veröffentlichte Aufschlüsselung der Protokollverwendung auf dem E-Bike-Markt, aber auf der Grundlage von Branchenkenntnissen und den wichtigsten Systemherstellern (z. B. Bosch, Bafang, Shimano, Mahle usw.) lässt sich Folgendes feststellen vernünftige geschätzte Verteilung ab dem Jahr 2025:
| Protokoll | Nutzungsanteil (Schätzung) | Gemeinsame Anwendungen | Hinweise |
|---|---|---|---|
| UART | ~50-60% | E-Bikes der Einstiegs- bis Mittelklasse | Weit verbreitet aufgrund der Einfachheit und der geringen Kosten |
| CAN-Bus | ~30-35% | Hochwertige, intelligente oder modulare E-Bikes | Zunehmende Akzeptanz durch intelligente Integration |
| RS-485 | ~5-10% | Flottensysteme, kommerzielle Langdrahtanlagen | Begrenzt auf bestimmte Anwendungsfälle |
| SIF / Eigenständig | <5% | Markenspezifische Systeme oder Altsysteme | Meist in älteren oder abgeschlossenen Ökosystemen zu finden |
Notiz: Diese Zahlen sind für die globalen Märkte (EU, CN, NA) verallgemeinert und basieren auf OEM-Trends, öffentlichen Unterlagen, Teardown-Daten und Erkenntnissen von Zulieferern.
E-Bike Kommunikationsprotokolle einfacher definieren :
Vereinfacht ausgedrückt, sind die Kommunikationsprotokolle bei E-Bikes wie folgt Sprachen oder Regeln, nach denen verschiedene elektronische Bauteile miteinander kommunizieren. Wenn die Komponenten nicht dieselbe Sprache sprechen, können sie einander nicht verstehen - selbst wenn der Stecker physisch passt.
📞 Analogie: Einzelnes Gespräch vs. Gruppenchat
Stellen wir uns zwei Arten der Kommunikation im Alltag vor, um die Protokolle der E-Bikes zu verstehen:
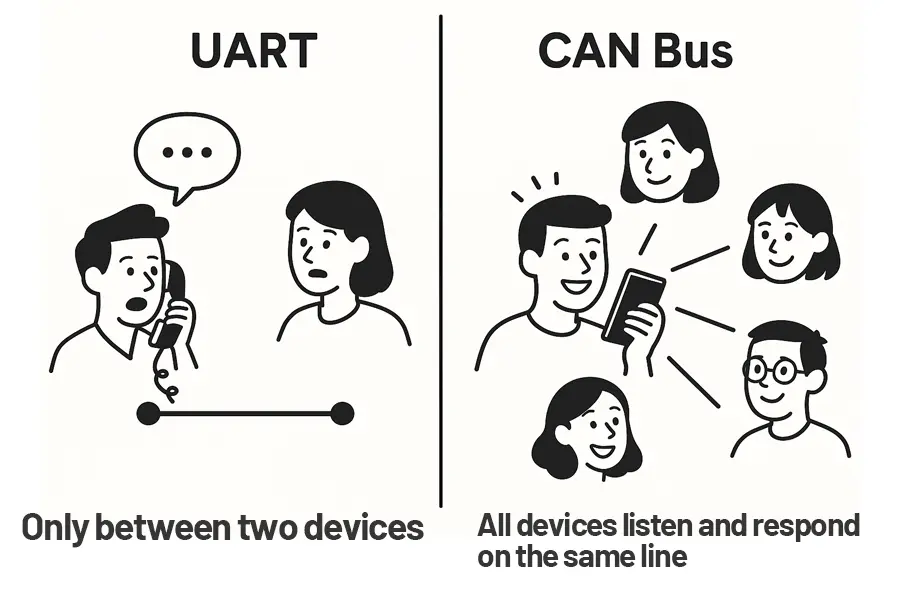
UART: Wie ein Telefongespräch unter vier Augen
- UART (Universal Asynchronous Receiver-Transmitter) ist wie ein Telefongespräch mit einem Freund.
- Nur zwei Geräte gleichzeitig sprechen können - wie Ihr Display und Ihr Controller.
- Wenn Sie mit einem anderen Gerät sprechen möchten, benötigen Sie ein weiteres Kabel (oder einen weiteren Anruf).
- Es ist einfach, aber nicht skalierbar, wenn Sie viele Geräte haben.
- Häufig in Basis-E-Bike-Systeme mit eingeschränkten Funktionen.
AN Bus: Wie ein Gruppenchat
- Der CAN-Bus (Controller Area Network) ist wie ein Gruppenchat auf WhatsApp oder WeChat.
- Alle Geräte (Controller, Batterie, Display, Sensor, Beleuchtung) befinden sich im selben Chatraum.
- Jede Nachricht ist mit einer Absender-ID versehen, und jedes Gerät liest nur die für es bestimmten Nachrichten.
- Es ist viel effizienter und ideal, wenn es viele Komponenten gibt, die zusammenarbeiten müssen.
- Verwendet in intelligente, fortschrittliche E-Bike-Systemeoft mit GPS, Bluetooth und App-Integration.
| Besonderheit | UART (Telefonanruf) | CAN-Bus (Gruppenchat) |
|---|---|---|
| Art der Verbindung | Eins-zu-eins (Punkt-zu-Punkt) | One-to-many (gemeinsamer Bus) |
| Skalierbarkeit | Niedrig - benötigt zusätzliche Kabel für mehr Geräte | Hoch - mehrere Geräte teilen sich dieselben Drähte |
| Kommunikationsfluss | Nur zwischen zwei Geräten | Alle Geräte hören und antworten auf der gleichen Leitung |
| Komplexität | Einfach | Komplexer, aber leistungsstark |
| Anwendungsfall | Basis-E-Bikes (nur Display ↔ Controller) | Intelligente E-Bikes mit BMS, App, Sensoren, usw. |
Die Rolle von Kommunikationsprotokollen
Kommunikationsprotokolle in E-Bikes dienen mehreren wichtigen Zwecken:
- Datenaustausch: Sie ermöglichen es dem Steuergerät, Echtzeitdaten an das Display zu senden (Geschwindigkeit, Ladezustand der Batterie, Fehlercodes) und Befehle zurück zu erhalten (z. B. Änderung der Unterstützungsstufe, Lichter ein/aus). Ohne ein geeignetes Protokoll erhalten Sie möglicherweise keine zuverlässige Geschwindigkeitsanzeige oder können die Einstellungen nicht anpassen.
- Koordinierung der Komponenten: In fortschrittlichen Systemen müssen mehrere Mikrocontroller koordiniert werden. So kann beispielsweise eine intelligente Batterie mit eigenem Batteriemanagementsystem (BMS) mit dem Motorcontroller kommunizieren, um Überstrom zu verhindern oder den genauen Batteriestand anzuzeigen. Ein CAN-Bus oder ein ähnliches Netzwerk ermöglicht es der Batterie, der Motorsteuerung, dem Display und sogar den Sensoren, Informationen in einem Netzwerk mit mehreren Knoten auszutauschen.
- Sicherheit und Verlässlichkeit: Ein gut durchdachtes Protokoll stellt sicher, dass das System im Falle eines Fehlers oder eines Signalverlusts (z. B. bei einem beschädigten Kabel) diesen erkennen und sichere Maßnahmen ergreifen kann (z. B. Abschalten der Motorleistung). Robuste Protokolle wie CAN beinhalten eine Fehlerprüfung und eine Priorisierung der Nachrichten, um dies zu ermöglichen. Bei einfacheren analogen Signalen ist eine solche Fehlerbehandlung nicht möglich - wenn sich ein Drosselklappenkabel löst, könnte das Steuergerät das Rauschen fälschlicherweise als Drosselsignal interpretieren, es sei denn, es sind Sicherheitsvorkehrungen getroffen worden.
- Erweiterungsfähigkeit: Bei E-Bikes mit vielen Funktionen (GPS-Tracker, Wegfahrsperre, mehrere Unterstützungssensoren usw.) erleichtert ein Kommunikationsnetzwerk das Hinzufügen oder Entfernen von Geräten. Anstatt für jedes neue Gerät eine eigene Kabelverbindung zum Steuergerät zu benötigen, kann sich ein Gerät dem gemeinsamen Bus anschließen und Daten mit allen anderen teilen. Diese Skalierbarkeit ist einer der Hauptgründe, warum moderne High-End-E-Bikes auf den CAN-Bus umsteigen.
Zusammenfassend lässt sich sagen, dass das Kommunikationsprotokoll das Rückgrat des elektrischen Systems des E-Bikes ist und dafür sorgt, dass alle elektronischen Teile zusammenarbeiten. In einem weiteren Beitrag werden wir uns mit den beiden Hauptprotokolltypen (UART und CAN) befassen und untersuchen, wie sie jeweils funktionieren und für welche Zwecke sie in E-Bikes eingesetzt werden. Cargo-E-Bikes. prüfen Sie, ob Sie interessiert sind:
- "UART in E-Bikes verstehen: Wie einfache serielle Kommunikation Ihre Fahrt antreibt"
- Eine einsteigerfreundliche Anleitung, wie UART den grundlegenden Datenaustausch zwischen E-Bike-Komponenten wie Displays und Controllern ermöglicht.
- "Was ist CAN-Bus in E-Bikes? Ein intelligenter Weg zum Anschluss von Batterien, Sensoren und mehr"
- Erfahren Sie, wie moderne E-Bikes den CAN-Bus nutzen, um die Kommunikation mehrerer Geräte, erweiterte Anzeigen und Systemdiagnosen zu unterstützen.
Anwendungsszenarien: Welches Kommunikationsprotokoll für welches E-Bike?
Es ist nützlich zu verstehen, wie UART und CAN in der Praxis für verschiedene E-Bike-Designs gewählt werden. Wir werden zwei große Kategorien betrachten: E-Bikes für Verbraucher (einschließlich typischer Pendler- oder Freizeiträder) Und Fracht-/Flotten-E-Bikes (häufig für Geschäftslieferungen oder von Mietflotten genutzt)und stellt fest, dass diese oft unterschiedliche Prioritäten haben.

- Standard-E-Bikes für Verbraucher (City-, Mountain- und Straßen-E-Bikes): Das sind die Fahrräder, die viele Privatpersonen für den persönlichen Gebrauch kaufen. Sie reichen von Einsteigermodellen bis hin zu sehr hochwertigen Modellen. Am unteren Ende (kostenempfindliche Modelle) ist die UART-Kommunikation sehr verbreitet. Ein einfaches 36-Volt-Pendler-E-Bike mit einem Trittfrequenzsensor und einer einfachen LED-Anzeige verwendet beispielsweise wahrscheinlich einen UART (oder sogar analoge Signale) zwischen dem Controller und der minimalen Anzeige. Der Schwerpunkt ist hier Kosteneffizienz und grundlegende Funktionalität. Viele dieser Fahrräder verwenden weit verbreitete Controller und Displays, die sich an ein de facto UART-Protokoll halten, was bedeutet, dass Fahrradmarken Komponenten von verschiedenen OEMs beziehen können. Das ist attraktiv für B2B-Käufer, die die Flexibilität haben wollen, z. B. ein schöneres Display von Hersteller A mit einem Controller von Hersteller B zu verwenden - solange beide UART im gleichen Format sprechen, kann es funktionieren (obwohl man die Kompatibilität bei Pinouts und Firmware überprüfen muss). Bei den höherwertigen Fahrrädern für Endverbraucher, insbesondere bei denen der großen Marken, geht der Trend in Richtung CAN-Bus. Leistungsstarke e-MTBs oder e-Rennräder mit Drehmomentsensoren und ausgefallenen Displays könnten CAN verwenden, um alles reibungslos zu integrieren. Einige Marken verwenden jedoch auch in High-End-Fahrrädern noch UART oder andere proprietäre serielle Verbindungen; dies variiert je nach Hersteller und dessen Designphilosophie.

- Cargo-E-Bikes und kommerzielle Flotten: Cargo-E-Bikes sind für die Beförderung schwerer Lasten oder Personen ausgelegt und werden häufig von Unternehmen eingesetzt (Lieferdienste, Postfahrräder usw.). Diese Fahrräder haben in der Regel folgende Prioritäten Robustheit, Sicherheit und Flottenmanagementfunktionen über die Kosten der Elektronik. In diesem Segment hat der CAN-Bus wirklich an Boden gewonnen. Zum Beispiel können Lastenfahrräder mit Doppelbatterien um die Reichweite zu erhöhen - die Verwaltung von zwei Batterien erfordert eine Kommunikation, um die Entladung auszugleichen oder zumindest den Status der beiden Batterien zu melden. CAN erleichtert die Kommunikation zwischen einem Steuergerät und zwei BMS-Einheiten (eine in jeder Batterie) über denselben Bus. Lastenfahrräder können auch über zusätzliches Zubehör verfügen: Bremslichter, Blinker, sogar elektronische Schlösser - die Koordinierung dieser Geräte über einen zentralen Bus vereinfacht die Verkabelung und Steuerung. Da Cargo-E-Bikes häufig in Flotten eingesetzt werden, haben Unternehmen außerdem gerne Telematik auf ihnen: GPS-Tracker, die den Standort des Fahrrads, die Nutzung und eventuelle Störungen melden können. Bei einem CAN-fähigen System kann ein Telematikmodul einfach die CAN-Nachrichten für Geschwindigkeit, Batteriestatus usw. abhören und diese Informationen hochladen. In einer Fallstudie mit einer europäischen Lieferflotte wurde gezeigt, dass das Anzapfen des CAN-Busses die Fernüberwachung von Wartungsdaten (z. B. Kilometerstand), die Ferndeaktivierung von Motoren zur Diebstahlsicherung und die Aktualisierung der Fahrrad-Firmware über die Luft ermöglicht - Funktionen, die für das Flottenmanagement äußerst nützlich sind. Dies wäre bei einem UART-basierten Fahrrad nur schwer zu implementieren.
- Mix-and-Match vs. integrierte Systeme: Wenn eine E-Bike-Marke die Freiheit haben möchte, Komponenten zu mischen oder Nachrüstungen auf dem Markt zuzulassen, tendieren sie dazu, UART-basierte Systeme zu verwenden. Wir haben gesehen, dass UART-Systeme ermöglichen den Austausch von Anzeigen oder die Änderung von Motoreinstellungen. Ein kleineres E-Bike-Unternehmen könnte diesen Weg bevorzugen, um nicht an einen Lieferanten gebunden zu sein - es kann den Motor-/Controller-Lieferanten wechseln, ohne das gesamte Ökosystem zu verändern, solange das Protokoll UART bleibt und es die Firmware anpassen kann. Auf der anderen Seite, Marken, die sich auf Systemoptimierung und Konformität konzentrieren, wählen oft CAN. Bosch-E-Bikes beispielsweise verwenden einen CAN-ähnlichen Bus (Bosch hat ein eigenes CAN-basiertes Protokoll), der Motor, Display und Akku miteinander verbindet. Dadurch wird sichergestellt, dass keine Teile von Drittanbietern ineinandergreifen können; alles ist fein aufeinander abgestimmt. Der Vorteil ist die hervorragende Zuverlässigkeit und Sicherheit - das System meldet einen Fehler, wenn etwas nicht den Spezifikationen entspricht. Der Nachteil ist, dass Sie sich als B2B-Käufer (z. B. als Fahrrad-OEM, der sich für Bosch entscheidet) dazu verpflichten, den Motor, den Controller, den Akku und das Display zu kaufen. alle von Bosch in einem Paket.
- Lastenfahrräder - Besondere Überlegungen: Lastenfahrräder werden, insbesondere in der EU, oft strenger geprüft, da sie schwerere Lasten oder sogar Fahrgäste befördern können. In Deutschland gibt es beispielsweise eine Norm (DIN 79010) speziell für die Sicherheit von Lastenfahrrädern (hauptsächlich mechanische Aspekte wie Rahmenfestigkeit und Bremsen). Diese Norm schreibt zwar keine Kommunikationsprotokolle vor, aber die sicherheitsorientierte Denkweise in Lastenfahrrädern empfiehlt die Verwendung eines Protokolls, mit dem sichergestellt werden kann, dass das System z. B. im Falle eines Fehlers (überhitzter Motor oder schwache Batterie) dies mitteilen und Maßnahmen ergreifen kann. Die Robustheit von CAN und die Fehlerbehandlung tragen dazu bei, diese Sicherheitsziele zu erreichen. Darüber hinaus werden Cargo-E-Bikes oft in städtischen Umgebungen eingesetzt (Auslieferung in Städten), wo es viele Funk-/Elektrorauschen gibt und viel auf dem Spiel steht, wenn ein Kommunikationsfehler zum falschen Zeitpunkt auftritt. Die Störfestigkeit von CAN ist hier ein großes Plus, denn es verhindert Missverständnisse, die zu unberechenbarem Verhalten führen könnten.


Sicherheitsstandards und Konformität des elektrischen Systems (EU/US)
Unabhängig vom verwendeten Kommunikationsprotokoll müssen die elektrischen Systeme von E-Bikes die Sicherheitsstandards einhalten, um einen sicheren und legalen Betrieb zu gewährleisten, insbesondere in Schlüsselmärkten wie Europa und den USA. Das Kommunikationsprotokoll kann sich indirekt auf die Konformität eines Fahrrads auswirken. So kann ein Protokoll, das uneingeschränkte Änderungen durch den Benutzer zulässt, ein Konformitätsrisiko darstellen, während ein Protokoll, das festgeschrieben ist, dazu beitragen kann, dass das Fahrrad innerhalb der gesetzlichen Grenzen bleibt. Schauen wir uns die relevanten Normen an und wie sie zusammenhängen:
Wie Kommunikationsprotokolle die Konformität von Elektrofahrrädern in der Europäischen Union beeinflussen
Europäische Union (EU) - EN 15194: In der EU werden die meisten E-Bikes (Fahrräder mit Tretunterstützung mit einer Motorleistung <= 250 W und einer Unterstützungsunterbrechung bei 25 km/h) wie folgt eingestuft EPACs (Elektronisch unterstützte Zyklen). Der Standard EN 15194 gilt für EPACs und definiert Anforderungen und Prüfverfahren für Sicherheit und Leistung. Dazu gehören die mechanische Sicherheit (Bremsen, Rahmen usw.) und die elektrische Sicherheit (Verkabelung, EMV usw.) sowie die Einhaltung der Geschwindigkeits- und Leistungsgrenzwerte für das Fahrrad.
- Für Kommunikationsprotokolle ist ein wichtiger Aspekt Elektromagnetische Verträglichkeit (EMV): Das System sollte keine übermäßigen Störungen aussenden oder übermäßig durch Störungen beeinträchtigt werden. Eine gut konzipierte CAN- oder UART-Kommunikationsleitung sollte EMV-Tests bestehen (EN 15194 verweist auf EN 55014 oder ähnliche Normen für EMV). Die Website Geräuscharmut von CAN kann bei der Erfüllung dieser EMV-Anforderungen von Vorteil sein, da es von Natur aus besser mit Störungen fertig wird, aber auch UART-Systeme können die Anforderungen erfüllen, wenn sie richtig abgeschirmt sind.
- Geschwindigkeits- und Leistungsmanipulationen: Die Norm EN 15194 schreibt vor, dass die Unterstützung bei 25 km/h endet und dass der Benutzer diese Grenze nicht einfach über den gesetzlichen Wert hinaus einstellen kann. Wenn ein Fahrrad UART verwendet und der Hersteller Programmierpads zugänglich macht, kann ein Benutzer könnte potenziell aufheben - dies könnte zu Problemen bei der Einhaltung der Vorschriften führen. Einige Hersteller verwenden daher speziell gesperrte CAN-Systeme, um zu verhindern, dass der Benutzer die Geschwindigkeitsbegrenzung ändert. Bei den CAN-basierten Motoren von Bafang beispielsweise ist die Geschwindigkeitsbegrenzung fest eingestellt und kann nicht über das Display geändert werden, so dass die Einhaltung der Vorschriften von Anfang an gewährleistet ist. Bei vielen UART-Systemen hingegen könnte ein versierter Benutzer den Einstellungsmodus auf dem Display aufrufen und die Radgröße oder das Limit verändern oder ein Programmierkabel verwenden, was gegen das Gesetz verstoßen könnte, wenn das Fahrrad eine Unterstützung von mehr als 25 km/h erhält.
- Elektrische Sicherheit: EN 15194 (letzte Überarbeitung) deckt die grundlegende elektrische Sicherheit ab, aber interessanterweise deckt die Batteriesicherheit nicht vollständig ab - Es wird davon ausgegangen, dass das Akkupaket selbst anderen Normen entsprechen muss. Der Schwerpunkt liegt eher auf der Integration, der Verdrahtung und dem grundlegenden Schutz (z. B. keine freiliegenden stromführenden Teile usw.). Ein Kommunikationsprotokoll wirkt sich nicht direkt darauf aus, aber indirekt kann ein Protokoll wie CAN, mit dem das BMS mit dem Steuergerät kommunizieren kann, die Sicherheit erhöhen - z. B. kann das BMS einen "Entladestopp"-Befehl senden, wenn die Batterie überhitzt. Auch wenn dies in der EN 15194 nicht vorgeschrieben ist, trägt diese Art von Funktion dazu bei, dass ein Fahrrad die allgemeinen Sicherheitserwartungen erfüllt (Vermeidung von thermischen Durchgehensereignissen).
Darüber hinaus müssen europäische Cargo-E-Bikes (insbesondere solche, die Güter/Personen befördern) möglicherweise die folgenden Anforderungen erfüllen Maschinenrichtlinie wenn sie nicht streng unter die Fahrradvorschriften fallen (einige schwere Lastenfahrräder tun dies). Auch hier sind robuste Ausfallsicherungen wichtig. Die Verwendung eines soliden Kommunikationsprotokolls mit ausfallsicherem Verhalten (z. B. CAN-Abschaltung im Fehlerfall) kann hier zur Einhaltung der Vorschriften beitragen.
Mehr Informationen über EU-Norm für E-Bikes
Wie Kommunikationsprotokolle die Einhaltung der Vorschriften für Elektrofahrräder in den Vereinigten Staaten beeinflussen
Vereinigte Staaten - UL 2849 und andere: In den USA ist die Herstellung von E-Bikes in Bezug auf die Leistung auf Bundesebene etwas weniger reguliert (es gibt eine Verbraucherproduktdefinition für ein E-Bike mit niedriger Geschwindigkeit von maximal 750 W und einer Geschwindigkeit von 20 mph bei Gasbetrieb/28 mph bei Tretunterstützung, aber keine verbindlichen Baunormen auf Bundesebene). Wie auch immer, Die Sicherheitszertifizierung wird immer wichtigervor allem wegen der Gefahr eines Brandes durch Batterien.
- UL 2849 ist die wichtigste Sicherheitsnorm für elektrische Systeme von E-Bikes in Nordamerika. Sie deckt das gesamte elektrische Antriebssystem eines E-Bikes ab - einschließlich des Akkus, des Motors, des Ladegeräts und aller Verbindungsleitungen. Bei der Prüfung nach UL 2849 wird unter anderem geprüft, ob die Verkabelung den Strömen gewachsen ist, ob das System gegen Kurzschlüsse geschützt ist und, was besonders wichtig ist, ob es auch die folgenden Punkte berücksichtigt UL 2271 für Batterien (dies ist eine batteriespezifische Sicherheitsnorm). In Bezug auf die Kommunikation schreibt UL 2849 kein Protokoll vor, aber es wird überprüft, dass das System sicher ausfällt, wenn z. B. die Kommunikation verloren geht oder ein Fehler erkannt wird (keine thermischen Ereignisse, kein Durchgehen des Motors). Ein CAN-basiertes System könnte einen leichten Vorteil haben, wenn es darum geht, Redundanz zu beweisen (z. B. wenn die Gasnachricht verloren geht, kann CAN dies erkennen und eine entsprechende Zeitspanne festlegen). Aber auch UART-Systeme können so ausgelegt werden, dass sie die UL 2849 erfüllen (sie benötigen lediglich eine gründliche Fehlerbehandlung in der Firmware des Controllers).
- Vorbeugung von Feuer und elektrischen Schlägen: Normen wie UL 2849 zielen darauf ab, elektrische Brände und Stromschläge zu verhindern. Wenn beispielsweise an einem E-Bike ein Ladegerät angeschlossen ist, sollte die Kommunikation zwischen Akku und Ladegerät (falls vorhanden) nicht zu einer Überladung führen. Vor allem die EnergyBus-Norm Das von uns erwähnte CAN-basierte EnergyBus-System wurde zum Teil durch Sicherheitsaspekte motiviert - es soll sicherstellen, dass jedes Ladegerät jede Batterie sicher laden kann, indem es über CANopen kommuniziert und den Strom nur dann freigibt, wenn ein ordnungsgemäßes Handshaking erfolgt ist. EnergyBus verwendet einen speziellen Stecker, der CAN-Datenleitungen enthält, so dass ein Ladegerät und eine Batterie zuerst die Kommunikation herstellen und dann den Ladestrom freigeben, um Funkenbildung oder nicht angepasste Spannungen zu vermeiden. Dieses Konzept stimmt gut mit der UL-Sicherheitslogik überein. Wenn eine Marke EnergyBus verwendet, hilft dies wahrscheinlich beim Bestehen von Sicherheitszertifizierungen, da es von Natur aus sichere Interaktionen zwischen den Komponenten verwaltet.
- Einhaltung der gesetzlichen Vorschriften (Geschwindigkeit/Leistung): In den USA ist das Klassensystem (E-Bikes der Klassen 1, 2 und 3) weitgehend ehrenamtlich und wird nicht so streng durchgesetzt wie die EU-Grenzwerte, aber aus Haftungsgründen stellen die Hersteller in der Regel sicher, dass ein als Klasse 2 verkauftes E-Bike nicht einfach so verändert werden kann, dass es beispielsweise mit Gas 20 mph überschreitet. Auch hier kann die Verwendung eines geschlossenen CAN-Protokolls helfen - der Benutzer kann nicht einfach ein Kabel einstecken und das Fahrrad außer Betrieb setzen. Es ist bemerkenswert, dass viele E-Bike-Unternehmen inzwischen mit UL-zertifizierten Batterien oder Systemen werben, um den Kunden Sicherheit zu garantieren. HOVSCO zum Beispiel (wie in seiner Wissensdatenbank zu sehen) betont, dass seine Fahrräder die UL 2849 für elektrische Sicherheit und die EN 15194 für allgemeine Sicherheit erfüllen. Das bedeutet, dass die Verkabelung, die Steckverbinder und die Kommunikationssysteme ohne Gefahren funktionieren müssen.
Internationale und andere Normen: Neben EN 15194 und UL 2849 gibt es noch weitere einschlägige Normen - z. B., ISO 4210 (Fahrradsicherheitsnorm) mit einem Teil, der die Anforderungen an E-Bikes abdeckt, und die deutsche DIN 79010 für Lastenfahrräder (die, wie wir festgestellt haben, Dinge wie die Stabilität des Rahmens unter Last und die Bremsleistung abdeckt). Diese schreiben nicht direkt die Elektronik vor, aber eine Lastenradnorm könnte implizit vorschreiben, dass z. B. die Unterstützung unter schwerer Last nicht ausfällt. Eine robuste Kommunikation stellt sicher, dass die Signale zwischen Batterie, Steuergerät und Sensoren zuverlässig bleiben, auch wenn das Fahrrad belastet wird (und vielleicht elektrische Störungen auftreten oder die Batterie schwächer wird).
Zusammenfassend: Konformität und Sicherheit bestimmen einige Designentscheidungen zwischen UART und CAN. Ein Hersteller, der ein Höchstmaß an Sicherheit anstrebt, könnte CAN für seine Fehlerprüfung und -kontrolle bevorzugen oder zusätzliche Sicherheitsvorkehrungen in UART-Systemen implementieren. Beide Protokolle können Teil eines sicheren Designs sein, aber es kommt darauf an, wie sie eingesetzt werden. Die die geschlossene Natur von CAN-Systemen kann die Einhaltung der Vorschriften erzwingen (z. B. Geschwindigkeitsbegrenzungen, die nicht, wie gesetzlich vorgeschrieben, von den Nutzern eingestellt werden können), während UART-Systeme bieten dem Benutzer mehr Freiheit, was ein zweischneidiges Schwert ist. Die Hersteller müssen dafür sorgen, dass auch UART-basierte Fahrräder mit einem physischen oder Software-Limiter ausgestattet sind, der nicht so leicht gehackt werden kann, um die gesetzlichen Bestimmungen einzuhalten.
Schließlich, unabhängig vom Protokoll, ist die Verwendung von hochwertige Steckverbinder und Verkabelung ist Teil der Konformität. In der EU muss das Fahrrad Vibrationen aushalten, ohne dass sich die Kabel lösen, und es darf bei Nässe nicht zu Kurzschlüssen kommen. Steckverbinder wie Higo/Julet (wasserdichte Steckverbinder, die häufig bei E-Bikes verwendet werden) sind nicht nur aus Gründen der Bequemlichkeit beliebt, sondern auch, weil sie dazu beitragen, die IP-Schutzarten und Zuverlässigkeitsanforderungen. Ein CAN-Bus verwendet in der Regel solche Anschlüsse (z. B. kann ein einzelner 4- oder 5-poliger Higo-Anschluss die CAN-Daten und die Stromversorgung für ein Display übertragen). Die Wahl des Protokolls ändert nichts an der Notwendigkeit einer guten Zugentlastung, Isolierung und verriegelbare Anschlüsse um Unterbrechungen zu vermeiden (was gefährlich sein könnte, wenn z. B. das Signal zum Abschalten der Bremse das Steuergerät nicht erreicht, weil sich ein Kabel gelöst hat).
Zum Abschluss dieses Abschnitts sei darauf hingewiesen, dass sowohl in Europa als auch in den USA die Sicherheit von E-Bikes inzwischen einen hohen Stellenwert hat. Die Einhaltung von Normen wie EN 15194 und UL 2849 ist für seriöse Marken zunehmend unverhandelbar. Das Kommunikationsprotokoll ist ein Teil des Puzzles - ein Mittel, um sicherzustellen, dass das elektrische System koordiniert und ausfallsicher ist. Die Zuverlässigkeit des CAN-Busses kann bei der Erfüllung dieser Normen helfen, da er eine robuste Kommunikation ermöglicht, während UART-Systeme ein sorgfältiges Design erfordern, um ebenso sicher zu sein. Die Hersteller wählen oft das Protokoll, das am besten mit der Konformitätsstrategie übereinstimmt: UART für einfachere Entwürfe, bei denen das Risiko leicht verwaltet werden kann, oder CAN für komplexe Systeme, bei denen seine Sicherheitsfunktionen besonders gut zur Geltung kommen.
Kosten und Markterwägungen bei der Auswahl der Kommunikationsprotokolle
Bei der Entscheidung zwischen verschiedenen Kommunikationsprotokollen (oder generell bei der Entwicklung des elektrischen Systems eines E-Bikes) sind die Kosten ein wichtiger Faktor - nicht nur die monetären Kosten, sondern auch die "Kosten" in Bezug auf Flexibilität und Lieferantenbeziehungen. Hier erfahren Sie, wie die Kosten im Vergleich aussehen und was B2B-Einkäufer oder -Ingenieure beachten sollten:
- Hardware-Kosten: Wie bereits erwähnt, verwendet ein UART-basiertes System in der Regel einfachere Hardware. Der Controller und das Display benötigen lediglich UART-Fähigkeit, die praktisch alle Mikrocontroller eingebaut haben. Die Verdrahtung könnte ein wenig einfacher sein (weniger Überlegungen zur Terminierung usw.). Ein CAN-basiertes System erfordert etwas mehr: einen CAN-Transceiver-Chip für jedes Gerät und möglicherweise eine leistungsstärkere MCU (obwohl heutzutage selbst relativ billige MCUs CAN integriert haben). Der tatsächliche Unterschied in der Stückliste mag sich bei hohen Stückzahlen in der Größenordnung von ein paar Dollar pro Fahrrad bewegen, aber in einem wettbewerbsorientierten Markt ist das immer noch von Bedeutung. Bei der Bestellung einer großen Fahrradflotte vervielfachen sich diese Beträge. Abgesehen davon ist der Die Kosten für CAN-Hardware sind gesunken. und die zusätzlichen Funktionen, die CAN bietet, könnten diesen Kompromiss leicht rechtfertigen.
- Entwicklungs- und Integrationskosten: Für ein E-Bike-Startup oder ein kleines Unternehmen kann es kostspielig sein, ein CAN-basiertes System von Grund auf zu entwickeln, wenn sie nicht über eigenes Fachwissen verfügen. Es könnte bedeuten, dass Ingenieure für eingebettete Systeme, die mit CAN vertraut sind, eingestellt werden müssen, dass in Tools investiert werden muss und dass Zeit für die Entwicklung kundenspezifischer Firmware aufgewendet werden muss. Wenn Sie ein fertiges System kaufen (wie Bosch- oder Shimano-Antriebseinheiten, die CAN-basiert sind), sind die Entwicklungskosten auf Ihrer Seite geringer, aber die Stückkosten sind höher (Bosch-Systeme sind teurer, unter anderem weil Sie eine voll integrierte Lösung und den Markennamen erhalten). A Das UART-System kann häufig aus handelsüblichen Komponenten zusammengesetzt werden. mit bekannter Kompatibilität - zum Beispiel verwenden viele Unternehmen Open-Source- oder Standardprotokolle, bei denen ein Großteil der Entwicklung bereits abgeschlossen ist, und das Risiko ist geringer. Für einen B2B-Käufer (z. B. ein Unternehmen, das eine Reihe von E-Bikes unter seiner Marke vertreiben möchte) kann die Entscheidung für UART bedeuten, dass er billigere generische Teile beziehen kann, während die Entscheidung für CAN oft bedeutet, dass er sich an das Ökosystem eines bestimmten Anbieters anpassen muss (der möglicherweise Lizenzgebühren oder höhere Preise verlangt).
- Kosten für Kundendienst und Wartung: Dies wird manchmal übersehen. Ein Flottenbetreiber (wie ein Fahrradverleih oder ein Lieferunternehmen) könnte feststellen, dass CAN-Bus-Fahrräder sparen Geld bei der Wartung. Und warum? Weil sie Probleme aus der Ferne oder schneller diagnostizieren können. Ein mit dem CAN-Bus verbundenes System kann Fehlercodes detailliert melden (z. B. "Batterie #2 Temperatursensor Fehler" als spezifischer Code). Techniker können Diagnosewerkzeuge an den CAN-Bus anschließen, um Probleme zu lokalisieren. Dies kann den Arbeitsaufwand verringern. Wie im IoT-Venture-Fall zu sehen ist, sind auch Dinge wie Firmware-Updates aus der Ferne möglich, was die Kosten für den physischen Rückruf von Fahrrädern für bestimmte Reparaturen sparen kann. Andererseits könnte die anfängliche Wartung eines UART-Fahrrads einfacher sein (vielleicht gibt es weniger Fehler in der Kommunikation), aber wenn etwas nicht in Ordnung ist, müssen Sie möglicherweise Teile durch Ausprobieren austauschen, da das System Ihnen nicht genau sagen kann, was falsch ist, außer dass vielleicht eine LED blinkt. Für den einzelnen Verbraucher könnte ein UART-Bike billiger zu reparieren sein, da er auf Standardteile und das Wissen der Community zurückgreifen kann, um es zu reparieren, während er bei einem CAN-Bike gezwungen sein könnte, einen autorisierten Service aufzusuchen (der möglicherweise teurer ist). Es gibt also einen Kostenkompromiss zwischen Benutzerfreundlichkeit (UART gewinnt) und erweiterte Diagnoseunterstützung (CAN gewinnt, was die Kosten für professionelle Dienstleistungen senken könnte).
- Kosten für Lizenzen und Eigentumsrechte: Die Verwendung eines proprietären CAN-Protokolls könnte Lizenzgebühren oder Einschränkungen mit sich bringen. Wenn eine Fahrradmarke ihr eigenes CAN-Protokoll entwickelt, ist das in Ordnung, aber wenn sie etwas wie CANopen oder EnergyBus verwendet, muss sie sich möglicherweise an Standards halten und möglicherweise Verbänden beitreten (z. B. EnergyBus e.V.). Diese Kosten sind im Allgemeinen gering, aber dennoch erwähnenswert. Proprietäre Systeme wie Bosch bedeuten, dass der Fahrradhersteller die Antriebseinheiten als Paket kauft; Bosch legt den Preis fest. Bei UART-Systemen gibt es oft mehr Wettbewerb unter den Teilelieferanten, was die Preise senken kann.
- Kundenwahrnehmung und Wert: Aus der Marketing-Perspektive könnte eine Marke einen höheren Preis für ein Fahrrad rechtfertigen, das über "CAN-Bus-Elektronik in Automobilqualität" verfügt, da dies fortschrittlich und zuverlässig klingt (auch wenn der Kunde den Unterschied nicht direkt sieht). Der Wert liegt in der erstklassige Haptik und Leistung die CAN-Systeme oft mit sich bringen (sie sind in der Regel in Fahrrädern eingebaut, die auch über hochwertige Motoren usw. verfügen). Marken, die auf den gehobenen Markt oder gewerbliche Kunden abzielen, können CAN also als Teil eines Premiumangebots nutzen. Bei E-Bikes der Einstiegsklasse hingegen ist den Kunden vor allem wichtig, dass es funktioniert und erschwinglich ist - sie werden keinen Aufpreis zahlen, nur weil das Display des Fahrrads CAN statt UART verwendet. Also, die Wahl des Protokolls sollte auf das Marktsegment des Fahrrads abgestimmt sein.
- Zukunftssicher: Ein Kostenfaktor, den Ingenieure berücksichtigen, sind die Opportunitätskosten für mangelnde Zukunftssicherheit. Wenn Sie jetzt in eine UART-basierte Plattform investieren, aber im nächsten Jahr weitere Funktionen hinzufügen möchten (z. B. eine zweite Batterie oder einen neuen Sensortyp), könnten Sie feststellen, dass die alte Plattform nur begrenzt einsetzbar ist, so dass Sie ein neues Design benötigen. Einige Unternehmen entscheiden, dass es auf lange Sicht kostengünstiger ist, von Anfang an auf CAN zu setzen, auch wenn es nicht voll genutzt wird, um Spielraum für neue Funktionen und Zubehör zu haben. Dies kann spätere Entwicklungskosten einsparen. Es ist eine strategische Entscheidung: ein bisschen mehr im Voraus zu bezahlen, anstatt später möglicherweise viel mehr für ein Upgrade auszugeben.
Was die tatsächlichen Preise angeht, so ist es schwer zu sagen, aber ein Brancheninsider könnte sagen, dass ein einfacher UART-E-Bike-Controller mit Display beispielsweise zwischen $50 und $100 kosten könnte, während ein gleichwertiger CAN-basierter Controller von einer großen Marke einige hundert Dollar kosten könnte (weil er anspruchsvoller ist). Dieser Unterschied umfasst jedoch oft auch eine bessere Motorleistung, Garantie usw. und nicht nur den Unterschied in der Kommunikation. Die zusätzliche Kosten nur für das Protokoll (z. B. das Hinzufügen eines CAN-Chips) ist gering, aber die Kosten für das Ökosystem (Anbindung an ein teures System im Vergleich zu einem billigen generischen System) kann groß sein.
Um es für einen B2B-E-Bike-Käufer einfach auszudrücken:
- Wenn Ihre Priorität darin besteht niedrigste Stückkosten und Sie möchten die Flexibilität haben, von mehreren Lieferanten zu beziehen, ein UART-basiertes offenes System ist attraktiv. Sie können sich nach passenden Displays und Steuerungen umsehen und möglicherweise sogar mit mehreren Herstellern verhandeln.
- Wenn Ihre Priorität darin besteht Leistung, Zuverlässigkeit und ein schlüsselfertiges System (und Sie sind bereit, dafür zu bezahlen), eine CAN-basiertes System von einem renommierten Anbieter könnte Ihnen Kopfzerbrechen ersparen und einen Mehrwert für Ihr Produkt schaffen (zu höheren Kosten, die Sie hoffentlich durch höhere Preise für Ihre Fahrräder oder durch Mengeneffizienzen wieder hereinholen).
Beschränkungen und zukünftige Trends
Auch wenn wir die Tugenden von UART und CAN preisen, ist es erwähnenswert, dass die Grenzen des aktuellen Stands der E-Bike-Kommunikation und wohin sich die Dinge entwickeln könnten:
- Fehlen einer branchenweiten Standardisierung: Im Gegensatz zur Automobilwelt, in der fast jedes Auto den CAN-Bus und die standardisierte Diagnose (OBD-II) nutzt, ist die E-Bike-Branche noch immer fragmentiert. Es gibt kein einziges universelles Protokoll die alle E-Bikes verwenden. UART-Implementierungen variieren (jeder Hersteller kann unterschiedliche Datenformate über UART haben), und CAN-Implementierungen sind oft proprietär. Dies ist eine Einschränkung für Verbraucher und Fahrradbauer - es ist nicht "Plug and Play" zwischen verschiedenen Marken. Man kann nicht ein beliebiges Display nehmen und erwarten, dass es mit einem beliebigen Controller funktioniert, es sei denn, sie verwenden explizit das gleiche Protokoll und die gleiche Firmware. EnergieBus ist ein vielversprechender Versuch der Standardisierung (mit CANopen CiA-454, das Nachrichten für E-Bike-Komponenten definiert), aber er ist noch nicht weit verbreitet. Wenn sich EnergyBus oder ähnliche Standards durchsetzen, könnten wir wirklich interoperable Komponenten sehen - zum Beispiel könnte ein Akku von Hersteller X mit einem Motorsystem von Hersteller Y verwendet werden, wobei das CANopen-basierte Protokoll sicherstellt, dass sie sich gegenseitig verstehen. Dies würde sowohl B2B-Käufern (mehr Lieferantenoptionen) als auch Verbrauchern (mehr Upgrade-/Reparaturoptionen) zugute kommen. Die Akteure in der Industrie haben jedoch auch geschäftliche Gründe, proprietäre Systeme beizubehalten (um Kunden an sich zu binden). Die Spannung zwischen Standardisierung vs. proprietäre Kontrolle wird die Zukunft der E-Bike-Protokolle bestimmen.
- Bandbreiten- und Datenbedarf: Derzeit ist die Kommunikation bei E-Bikes relativ datenarm. Künftige E-Bikes könnten jedoch mehr Informationen übermitteln - man denke nur an die Erfassung von Hochfrequenz-Drehmomentsensordaten, hochauflösende Leistungsdaten für Trainingszwecke oder sogar Videos von Kameras für die Sicherheit. CAN kann bei klassischen Geschwindigkeiten zu einem Engpass werden, wenn viele Daten übertragen werden sollen. In der Automobilindustrie gibt es CAN-FD (eine erweiterte Version von CAN mit größeren Datenrahmen und höherem Durchsatz) und andere Protokolle wie Ethernet für hohe Bandbreitenanforderungen. Für E-Bikes könnte bei Bedarf CAN-FD zum Einsatz kommen, oder BLE/Wi-Fi für die Übertragung von Datenprotokollen. Drahtlose Kommunikation könnte auch kabelgebundene Protokolle ergänzen: Viele E-Bikes nutzen bereits Bluetooth Low Energy, um das Fahrrad mit einer Smartphone-App zu verbinden. Dies liegt außerhalb des Rahmens des internen elektrischen Systems, ist aber als paralleler Kanal erwähnenswert. In Zukunft könnten einige einfachere E-Bikes vielleicht sogar auf ein kabelgebundenes Display verzichten und ein drahtloses Modul für die Verbindung mit einem Telefon verwenden - obwohl kritische Steuerelemente (wie Gas- oder Bremssignale) aus Gründen der Zuverlässigkeit wahrscheinlich kabelgebunden bleiben würden. In Frachtflotten könnten wir eine stärkere Integration der V2X-Kommunikation (Vehicle-to-Everything) sehen - E-Bikes, die mit Logistiksystemen oder der Verkehrsinfrastruktur kommunizieren, was wiederum auf das CAN-Bus-Kernsystem aufgesetzt werden würde.
- Sicherheitsprobleme: E-Bikes werden immer mehr vernetzt und nutzen eine komplexere Kommunikation, Cybersicherheit zu einem Problem. Ein UART-System ohne externe Konnektivität ist praktisch immun gegen Hackerangriffe (jemand müsste die Drähte physisch anzapfen). Aber ein CAN-Bus, der mit einem Bluetooth-Modul oder einem GSM-Modul (für die Flottenverfolgung) verbunden ist, birgt potenzielle Schwachstellen. Die Hersteller müssen sicherstellen, dass ihre Protokolle (insbesondere die drahtlosen Schnittstellen zum Bus) sicher sind, um eine böswillige Kontrolle zu verhindern (man stelle sich einen IoT-Hack vor, der eine Flotte von Lieferfahrrädern aus der Ferne deaktivieren könnte - ein weit hergeholtes, aber theoretisch mögliches Szenario, wenn es nicht gesichert ist). Proprietäre Protokolle sind von Natur aus einigermaßen sicher durch Unsichtbarkeit, aber wenn CAN in E-Bikes zum Allgemeingut wird, könnten böswillige Akteure versuchen, CAN-Nachrichten über einen offenen Port einzuschleusen. Daher werden wir in Zukunft vielleicht mehr Verschlüsselung oder Authentifizierung in der E-Bike-Kommunikation sehen.
- Benutzererfahrung: Welches Protokoll auch immer verwendet wird, es sollte ein gutes Benutzererlebnis bieten. Die Fahrer legen Wert auf Dinge wie eine reibungslose Leistungsabgabe, genaue Informationen auf dem Display und funktionierende Sicherheitsfunktionen. Eine Einschränkung bei frühen CAN-basierten Systemen war, dass sie manchmal zu gesperrt - die Nutzer waren frustriert, dass sie nicht einmal einfache Einstellungen ändern konnten. Wenn die Systeme ausgereift sind, könnten die Hersteller Wege finden, den Nutzern Flexibilität zu bieten (über autorisierte Apps oder Einstellungen), ohne die Kontrolle zu beeinträchtigen. Zum Beispiel könnte eine App eine begrenzte Einstellung (innerhalb sicherer Grenzen) selbst bei einem CAN-System erlauben oder die Kommunikation von zertifiziertem Zubehör von Drittanbietern über den Bus ermöglichen (vielleicht unter Verwendung von EnergyBus-Standardnachrichten). Mit der Standardisierung von Protokollen können wir etwas mehr Offenheit erwarten, ironischerweise sogar in einer CAN-Welt.
Abschließend sei gesagt, dass die das elektrische Kommunikationssystem von E-Bikes - ob UART oder CAN - ist entscheidend für die Leistung, Sicherheit und Modularität des Fahrrads. Ingenieure, die E-Bikes entwerfen, müssen die Einfachheit von UART gegen die Raffinesse von CAN abwägen. B2B-Käufer müssen abwägen, wie sich die Wahl auf die Kosten, die Lieferkette und das Wertversprechen ihres Produkts auswirkt. Die Industrie scheint in Richtung CAN-Bus zu tendieren, da sich E-Bikes zu immer besser vernetzten und leistungsfähigeren Maschinen entwickeln, aber UART-basierte Systeme werden wahrscheinlich noch eine Weile parallel für einfachere, kostengünstigere Modelle verwendet werden (sie sind schließlich "gut genug" für ein großes Segment von Fahrern).
Durch das Verständnis dieser Kommunikationsprotokolle - im Wesentlichen die elektrische Sprache von E-Bikes - gewinnt man ein viel tieferes Verständnis dafür, wie ein E-Bike intern funktioniert. Von der Drehung des Gaspedals oder dem Druck auf das Pedal bis hin zum Anfahren des Motors und den Zahlen auf dem Display - all das wird durch Bits und Bytes ermöglicht, die über Drähte laufen und sicherstellen, dass Batterie, Motor und Fahrer sind synchronisiert. Und egal, ob es sich um ein elegantes E-Bike für die Stadt oder einen schweren Lastentransporter handelt, diese Harmonie sorgt dafür, dass sich die Fahrt mühelos und sicher anfühlt. Letztendlich besteht das Ziel eines jeden Protokolls darin, die Technologie in den Hintergrund treten zu lassen, damit die Fahrer einfach die Fahrt genießen können - jetzt aber hoffentlich mit einem kleinen Einblick in die beeindruckende elektronische Koordination, die unter ihren Füßen stattfindet.
Quellen:
- Qiolor E-Bike Führer - "Wie Sie ein kompatibles Display für Ihren Ebike-Controller auswählen" (2025) - Erörterung von UART- und CANBUS-Sprachen und der Bedeutung von übereinstimmenden Protokollen.
- Velco.tech - "CAN vs. UART: Unterschiede zwischen den Kommunikationsmodi" (2024) - Erläuterung der Einfachheit von UART im Vergleich zu den Netzwerkfähigkeiten von CAN und Auflistung ihrer Vorteile/Einschränkungen .
- Biktrix Hilfe-Center - "Was sind die Protokolle CANBUS und UART?" - eine benutzerorientierte Betrachtung, wie CAN die Einstellungen festhält (feste Geschwindigkeitsbegrenzung) und UART Änderungen ermöglicht, sowie ein Vergleich der Austauschbarkeit von Anzeigen.
- IoT Venture (Fallstudie mit CYCLE-Flotte) - Beschreibung der Vorteile der CAN-Integration in E-Bike-Flotten: Zugriff auf Wartungsdaten, Ferndeaktivierung des Motors, OTA-Updates .
- HOVSCO Wissen - "Welche Sicherheitsmerkmale haben Elektrofahrräder?" - Hinweise auf EN 15194 (EU), die Geschwindigkeits-/Leistungsgrenzen und Haltbarkeit gewährleistet, und UL 2849 (US), die sich auf elektrische Sicherheit und Brandschutz konzentriert, sowie die Erwähnung von DIN 79010 für die Sicherheit von Lastenrädern.
- Texas Instruments App Note - "Überlegungen zum Hardware-Design für ein Elektrofahrrad mit BLDC-Motor" - lieferte typische E-Bike-System-Blockdiagramme und Einblicke in die Steuerelektronik.
- Letrigo E-Bike Wissen - "E-Bike Display Verkabelung erklärt" - Einzelheiten zur Verdrahtung und zu den Steckern (Higo/Julet) und weist darauf hin, dass es keinen universellen Verdrahtungsstandard gibt, und betont die richtige Abstimmung der Verbindungen und eine robuste Verdrahtung für die Signalintegrität.
- EnergyBus Standard - Einführung von Kvaser - beschreibt EnergyBus als einen offenen CANopen-basierten Standard für LEV-Komponenten, um Kompatibilität und Sicherheit zwischen den Herstellern zu gewährleisten.




