
Les vélos électriques (e-bikes), y compris les e-bikes cargos, reposent sur un système électrique complexe qui relie la batterie, le moteur, le contrôleur, les capteurs et l'interface utilisateur. Les protocoles de communication de ce système constituent le "langage" qui permet à tous ces composants de se coordonner de manière transparente. Dans cette présentation de vulgarisation scientifique, nous expliquerons ce que sont ces protocoles de communication et comment ils fonctionnent dans les systèmes électriques des vélos électriques. Nous aborderons les types de protocoles utilisés, leurs différences, leurs applications, leurs avantages et leurs inconvénients, les considérations de coût, la conformité aux normes de sécurité de l'UE et des États-Unis, ainsi que les limitations. L'objectif est de fournir un guide clair et faisant autorité à nos clients et à notre public, en équilibrant la profondeur technique et la compréhension pratique.
Composants clés de l'E-Bike - Le "système nerveux".
Les vélos électriques peuvent être considérés comme dotés d'un système nerveux central composé de fils et de liaisons de données qui relient tous les composants essentiels. Tout comme les nerfs transportent les signaux dans le corps, le faisceau de câbles transporte les signaux d'alimentation et de données à travers le vélo. Les principaux composants d'un système électrique typique de vélo électrique sont les suivants :

- Batterie : La source d'alimentation en courant continu (généralement 36-48 V) qui fournit l'énergie au système. Elle est reliée au contrôleur par des câbles d'alimentation épais (munis de fusibles ou de disjoncteurs pour la sécurité) pour fournir le courant principal. Certaines batteries avancées disposent également d'une liaison de données (via des lignes de communication) pour partager des signaux d'état ou de contrôle avec le contrôleur.
- Moteur et contrôleur : Le moteur (moteur de moyeu dans une roue ou moteur central à la manivelle) est alimenté par le contrôleur de moteur, qui est le "cerveau" régulant la puissance du moteur en fonction des données fournies par le cycliste et du retour d'information des capteurs. Le contrôleur est une unité électronique dotée d'un microprocesseur qui reçoit des signaux (accélérateur, capteur de pédale, freins, etc.) et gère l'alimentation du moteur. Les moteurs sont généralement équipés de fils de phase (câbles lourds transportant l'énergie) et de fils de capteurs (câbles fins des capteurs à effet Hall fournissant un retour d'information sur la position du rotor) allant vers le contrôleur.
- Interface humaine (accélérateur, capteur de pédalage, écran) : Le cycliste communique avec le vélo électrique par l'intermédiaire de dispositifs tels que l'accélérateur (souvent une poignée de guidon avec un capteur à effet Hall qui émet un signal de tension variable pour demander la vitesse) et le capteur d'assistance au pédalage (PAS) qui détecte le mouvement de pédalage par l'intermédiaire d'aimants et de capteurs. L'unité d'affichage sur le guidon indique la vitesse, le niveau de la batterie, le niveau d'assistance, etc. et comprend souvent des boutons permettant au cycliste de régler les paramètres. L'écran et le contrôleur échangent des données par l'intermédiaire d'un câble multifilaire comprenant des lignes d'alimentation et de communication.
- Coupe-circuits de sécurité (leviers de frein) : Les leviers de frein des vélos électriques sont généralement dotés d'interrupteurs de coupure qui envoient un signal au contrôleur pour couper immédiatement la puissance du moteur lors du freinage. Généralement, un simple circuit à deux fils est utilisé à cet effet, agissant comme un signal marche/arrêt vers le contrôleur.
- Éclairage et accessoires : De nombreux vélos électriques intègrent également des feux avant/arrière, un klaxon, des chargeurs USB, etc. Ceux-ci peuvent être contrôlés par le contrôleur principal ou fonctionner sur des circuits séparés, mais dans les systèmes haut de gamme, ils peuvent également être adressés via le bus de communication.
Pour un guide détaillé des accessoires pour vélos électriques et vélos-cargos, vous pouvez Lisez cet article pour une réponse plus complète ou encore de consulter notre Cargo Bike 101 page.
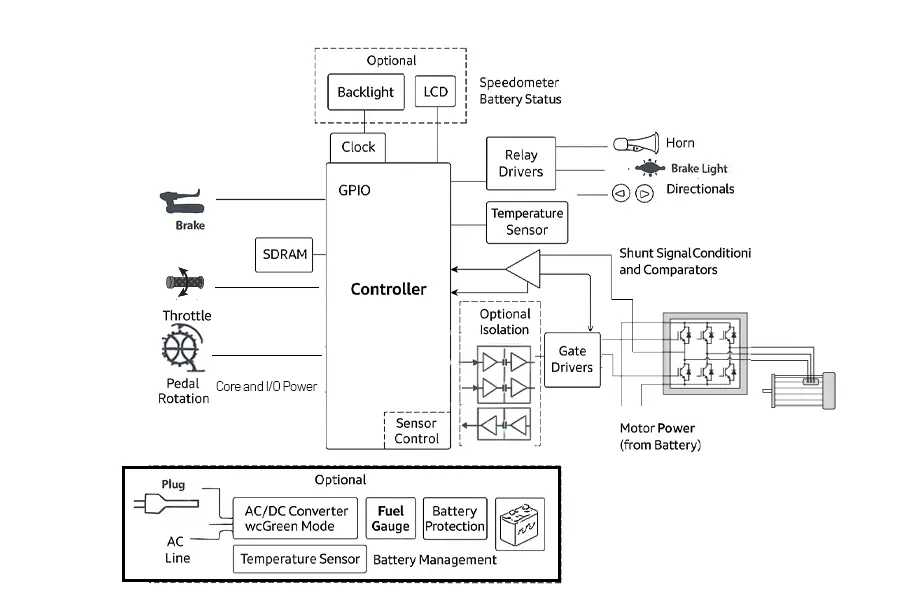
Figure 2 : Schéma fonctionnel d'un système typique de contrôle de bicyclette électrique et de gestion de la batterie. Le contrôleur central s'interface avec les entrées clés - accélérateur, capteurs de pédales, leviers de frein - et gère les sorties telles que les signaux d'entraînement du moteur via des pilotes de portes, des pilotes de relais et des connexions GPIO. Des modules optionnels tels que des écrans LCD, des chargeurs de batterie, des jauges de carburant et des rétroéclairages étendent les fonctionnalités du système. La communication entre les composants permet de coordonner en temps réel l'alimentation du moteur, l'éclairage, les coupures de sécurité et la surveillance de l'état de la batterie.
Quels sont les protocoles de communication pour les vélos électriques ?
Dans le contexte des vélos électriques, les protocoles de communication désignent la méthode et le format par lesquels les composants électroniques échangent des données. Les premiers vélos électriques ou les vélos électriques de base n'avaient souvent pas de réseau numérique complexe - de nombreux signaux étaient analogiques ou de simples circuits marche/arrêt. Par exemple, un accélérateur envoie une tension analogique pour indiquer la puissance souhaitée par le cycliste, et un interrupteur de frein ouvre ou ferme simplement un circuit pour couper la puissance. Cependant, à mesure que les vélos électriques sont devenus plus sophistiqués - avec des écrans intelligents, des capteurs avancés et même l'intégration d'un GPS ou d'un smartphone - le besoin d'une communication numérique plus robuste s'est fait sentir.
Aujourd'hui, deux principaux protocoles de communication numérique dominent les systèmes de vélos électriques :
- UART (Universal Asynchronous Receiver-Transmitter) : Méthode de communication en série qui crée une liaison de données directe entre deux appareils (généralement le contrôleur et l'écran).
- Bus CAN (Controller Area Network) : Protocole de réseau qui permet à plusieurs dispositifs (contrôleur, écran, système de gestion de la batterie, capteurs, etc.) de communiquer sur les mêmes fils de bus partagés.
Outre UART et CAN Bus, deux autres protocoles de communication sont parfois utilisés dans les systèmes de vélos électriques :
- SIF (Serial Interface Format) : Il s'agit d'un protocole propriétaire ou simplifié que l'on trouve couramment dans certains systèmes de marque (par exemple, Shimano STEPS ou d'anciennes unités d'affichage). Il est généralement utilisé pour l'échange de données de base entre le contrôleur et l'écran ou les boutons à distance. Comme le SIF manque de normalisation ouverte et de flexibilité, il est principalement limité à des marques spécifiques ou à des modèles anciens.
- RS-485 (norme 485 recommandée) : RS-485 est un protocole de communication série de qualité industrielle connu pour sa fiabilité sur de longues distances et sa résistance au bruit. Bien qu'il ne soit pas aussi répandu que UART ou CAN dans les vélos électriques grand public, il apparaît dans les systèmes d'alimentation électrique. certains systèmes de flotte haut de gamme ou commerciauxLes vélos électriques sont plus faciles à utiliser, surtout lorsqu'ils doivent être robustes et que leur câblage doit être prolongé, comme c'est le cas pour les vélos partagés, les flottes de véhicules de location ou les vélos électriques à usage intensif.
Ces protocoles sont essentiellement les "langages" de l'électronique du vélo électrique. Si tous les composants parlent la même langue, les informations circulent correctement ; dans le cas contraire, les appareils ne se comprennent pas. C'est pourquoi il est essentiel de faire correspondre le protocole lorsqu'on associe un écran à un contrôleur, par exemple. Même si la prise est adaptée, une incompatibilité de protocole signifie que les pièces ne fonctionneront pas ensemble.
Aperçu de l'utilisation du marché (tendances estimées pour 2024-2025)
Bien qu'il n'existe pas de répartition universellement publiée de l'utilisation des protocoles sur le marché des vélos électriques, sur la base des informations fournies par l'industrie et les principaux fournisseurs de systèmes (par exemple Bosch, Bafang, Shimano, Mahle, etc.), voici un aperçu de l'utilisation des protocoles sur le marché des vélos électriques. distribution estimée raisonnable à partir de 2025 :
| Protocole | Part d'utilisation (estimation) | Applications courantes | Notes |
|---|---|---|---|
| UART | ~50-60% | Vélos électriques d'entrée et de milieu de gamme | Largement utilisé en raison de sa simplicité et de son faible coût |
| Bus CAN | ~30-35% | Vélos électriques haut de gamme, intelligents ou modulaires | Adoption croissante grâce à une intégration intelligente |
| RS-485 | ~5-10% | Systèmes de flotte, installations commerciales à fil long | Limité à des cas d'utilisation spécifiques |
| SIF / Propriétaire | <5% | Systèmes spécifiques à une marque ou anciens systèmes | Principalement dans les écosystèmes anciens ou verrouillés |
Remarque : Ces chiffres sont généralisés sur les marchés mondiaux (UE, CN, NA) et sont basés sur les tendances des équipementiers, la documentation publique, les données de démontage et les informations des fournisseurs de composants.
Définir plus facilement les protocoles de communication pour les vélos électriques :
En termes simples, les protocoles de communication des vélos électriques sont les suivants des langages ou des règles qui permettent aux différents composants électroniques de communiquer entre eux. Si les composants ne parlent pas la même langue, ils ne peuvent pas se comprendre, même si la fiche est physiquement adaptée.
📞 Analogie : Appel en tête-à-tête ou discussion en groupe
Imaginons deux modes de communication dans la vie de tous les jours pour comprendre les protocoles des vélos électriques :
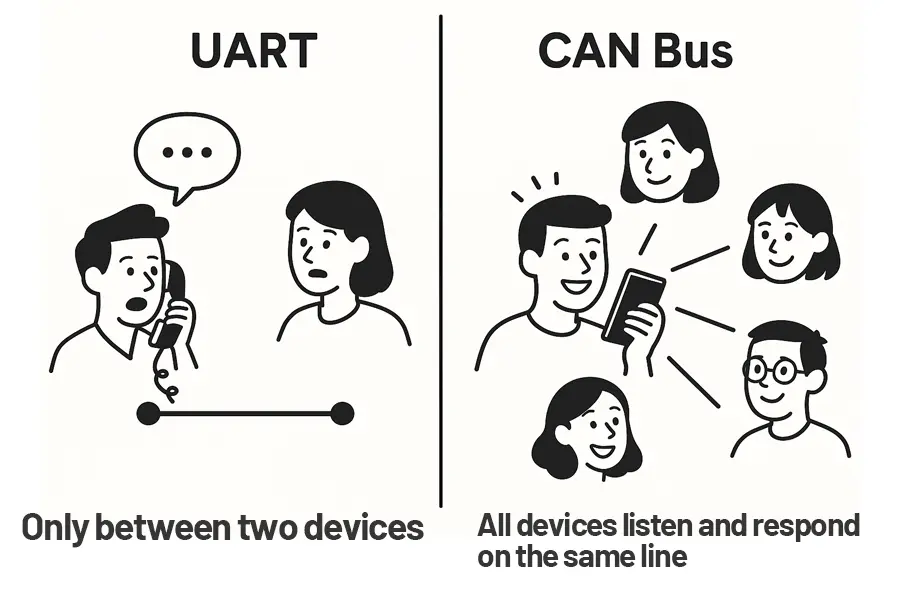
UART : comme un appel téléphonique individuel
- UART (Universal Asynchronous Receiver-Transmitter), c'est comme appeler un ami au téléphone.
- Seulement deux dispositifs peuvent parler à la fois - comme votre écran et votre contrôleur.
- Si vous voulez parler à un autre appareil, vous devez un autre fil (ou un autre appel téléphonique).
- C'est simple, mais ce n'est pas extensible lorsque vous avez beaucoup d'appareils.
- Courant en systèmes de base pour vélos électriques avec des fonctionnalités limitées.
AN Bus : Comme une discussion de groupe
- Le bus CAN (Controller Area Network) est comme un chat de groupe sur WhatsApp ou WeChat.
- Tous les appareils (contrôleur, batterie, écran, capteur, lumières) se trouvent dans la même salle de discussion.
- Chaque message est marqué d'un identifiant d'expéditeur et chaque appareil ne lit que les messages qui lui sont destinés.
- C'est beaucoup plus efficace et idéal lorsqu'il y a beaucoup de composants qui doivent fonctionner ensemble.
- Utilisé dans systèmes intelligents et avancés pour vélos électriquessouvent avec GPS, Bluetooth et intégration d'applications.
| Fonctionnalité | UART (appel téléphonique) | CAN Bus (Group Chat) |
|---|---|---|
| Type de connexion | Un à un (point à point) | Un à plusieurs (bus partagé) |
| Évolutivité | Faible - nécessite des fils supplémentaires pour un plus grand nombre d'appareils | Élevé - plusieurs appareils partagent les mêmes fils |
| Flux de communication | Uniquement entre deux appareils | Tous les appareils écoutent et répondent sur la même ligne |
| Complexité | Simple | Plus complexe mais puissant |
| Cas d'utilisation | Vélos électriques de base (écran ↔ contrôleur uniquement) | Vélos électriques intelligents avec BMS, application, capteurs, etc. |
Le rôle des protocoles de communication
Les protocoles de communication des vélos électriques servent plusieurs objectifs importants :
- Partage des données : Ils permettent au contrôleur d'envoyer des données en temps réel à l'écran (vitesse, état de charge de la batterie, codes d'erreur) et de recevoir des commandes en retour (par exemple, modification du niveau d'assistance, allumage/extinction des feux). Sans protocole approprié, vous risquez de ne pas obtenir un relevé de vitesse fiable ou de ne pas pouvoir régler les paramètres.
- Coordination des composants : Dans les systèmes avancés, plusieurs microcontrôleurs doivent se coordonner. Par exemple, une batterie intelligente dotée de son propre système de gestion de la batterie (BMS) peut communiquer avec le contrôleur de moteur pour éviter les surintensités ou pour afficher un pourcentage précis de la batterie. Un bus CAN ou un réseau similaire permet à la batterie, au contrôleur de moteur, à l'écran et même aux capteurs de partager des informations dans un réseau à plusieurs nœuds.
- Sécurité et fiabilité : Un protocole bien conçu garantit qu'en cas d'erreur ou de perte de signal (par exemple, si un câble est endommagé), le système peut le détecter et prendre des mesures de sécurité (par exemple, couper l'alimentation du moteur). Les protocoles robustes tels que CAN comprennent des fonctions de contrôle des erreurs et de hiérarchisation des messages pour gérer ces problèmes. Les signaux analogiques plus simples ne disposent pas d'une telle gestion des erreurs - si un câble d'accélérateur se détache, le contrôleur peut interpréter à tort le bruit comme un signal d'accélérateur, à moins que des dispositions de sécurité ne soient en place.
- Extensibilité : Pour les vélos électriques riches en fonctionnalités (traceurs GPS, dispositifs antivol, capteurs d'assistance multiples, etc.), un réseau de communication facilite l'ajout ou le retrait de dispositifs. ), un réseau de communication facilite l'ajout ou la suppression de dispositifs. Au lieu que chaque nouveau dispositif ait besoin d'une liaison câblée dédiée au contrôleur, un dispositif peut rejoindre le bus commun et partager des données avec tous les autres. Cette évolutivité est l'une des principales raisons pour lesquelles les vélos électriques modernes haut de gamme adoptent le bus CAN.
En résumé, le protocole de communication est l'épine dorsale du système électrique du vélo électrique, garantissant que toutes les pièces électroniques fonctionnent de concert. Dans un autre article, nous nous pencherons sur les deux principaux types de protocoles (UART et CAN), en examinant leur fonctionnement et leurs cas d'utilisation respectifs dans les vélos électriques et les systèmes d'alimentation électrique. vélos électriques cargo. vérifiez si vous êtes intéressé(e) :
- "Comprendre l'UART dans les vélos électriques : Comment une simple communication série alimente votre vélo"
- Un guide pour débutants sur la façon dont UART permet l'échange de données de base entre les composants des vélos électriques tels que les écrans et les contrôleurs.
- "Qu'est-ce que le bus CAN pour les vélos électriques ? Une façon plus intelligente de connecter les batteries, les capteurs, etc.
- Découvrez comment les vélos électriques modernes utilisent le bus CAN pour prendre en charge la communication entre plusieurs appareils, les affichages avancés et les diagnostics du système.
Scénarios d'application : Quel protocole de communication pour quel vélo électrique ?
Il est utile de comprendre comment UART et CAN sont choisis en pratique pour différents modèles de vélos électriques. Nous examinerons deux grandes catégories : les vélos électriques grand public (y compris les vélos typiques pour les déplacements quotidiens ou les loisirs) et les vélos électriques cargo/de flotte (souvent utilisés pour les livraisons professionnelles ou par les flottes de location)Il est à noter que ces derniers ont souvent des priorités différentes.

- Vélos électriques grand public standard (vélos de ville, de montagne, de route) : Ce sont les vélos que de nombreux particuliers achètent pour leur usage personnel. Ils vont de l'entrée de gamme au très haut de gamme. Dans le bas de gamme (modèles sensibles au coût), la communication UART est extrêmement courante. Par exemple, un simple vélo électrique de 36V avec un capteur de cadence de pédalage et un affichage LED basique utilise probablement un UART (ou même des signaux analogiques) entre le contrôleur et l'affichage minimal dont il dispose. L'accent est mis ici sur rapport coût-efficacité et fonctionnalité de base. Beaucoup de ces vélos utilisent des contrôleurs et des écrans largement disponibles qui adhèrent à un protocole UART de facto, ce qui signifie que les marques de vélos peuvent s'approvisionner en composants auprès de différents équipementiers. C'est intéressant pour les acheteurs B2B qui veulent avoir la possibilité d'utiliser, par exemple, un plus bel écran du fournisseur A avec un contrôleur du fournisseur B - tant que les deux utilisent le protocole UART dans le même format, cela peut fonctionner (bien qu'il faille vérifier la compatibilité des brochages et des microprogrammes). Sur les vélos grand public haut de gamme, en particulier ceux fabriqués par les grandes marques, la tendance est au bus CAN. Les e-MTB ou e-road très performants, équipés de capteurs de couple et d'affichages sophistiqués, peuvent utiliser le bus CAN pour tout intégrer en douceur. Cependant, certaines marques utilisent encore UART ou d'autres liaisons série propriétaires, même sur les vélos haut de gamme ; cela varie en fonction du fabricant et de sa philosophie de conception.

- Vélos électriques de transport de marchandises et flottes commerciales : Les vélos électriques cargo sont conçus pour transporter des charges lourdes ou des passagers et sont souvent utilisés par les entreprises (services de livraison, vélos postaux, etc.). Ces vélos ont tendance à privilégier la robustesse, la sécurité et les capacités de gestion de la flotte sur le coût de l'électronique. C'est dans ce segment que le bus CAN a vraiment gagné du terrain. Par exemple, les vélos cargos peuvent avoir batteries doubles pour augmenter l'autonomie - la gestion de deux batteries nécessite une communication pour équilibrer la décharge ou au moins pour signaler l'état de chacune d'elles. Le CAN permet à un contrôleur de communiquer plus facilement avec deux unités BMS (une dans chaque batterie) sur le même bus. Les vélos cargo peuvent également être équipés d'accessoires supplémentaires : feux de freinage, clignotants, voire serrures électroniques - la coordination de ces accessoires via un bus central simplifie le câblage et le contrôle. De plus, comme les vélos électriques cargo sont souvent utilisés dans des flottes, les entreprises préfèrent avoir des systèmes de gestion de la batterie (BMS). télématique sur eux : des traceurs GPS qui peuvent signaler l'emplacement du vélo, son utilisation et les éventuelles défaillances. Avec un système compatible CAN, un module télématique peut simplement écouter les messages CAN concernant la vitesse, l'état de la batterie, etc. et télécharger ces informations. En fait, une étude de cas portant sur une flotte de livraison européenne a démontré que l'exploitation du bus CAN permettait de contrôler à distance les données d'entretien (comme le kilométrage), de désactiver le moteur à distance pour lutter contre le vol et d'effectuer des mises à jour en temps réel du microprogramme du vélo - des fonctions extrêmement utiles pour la gestion de la flotte. Ces fonctions seraient difficiles à mettre en œuvre sur un vélo équipé d'un UART.
- Systèmes mixtes et systèmes intégrés : Si une marque de vélos électriques veut avoir la liberté de mélanger les composants ou de permettre des mises à niveau après-vente, elle a tendance à s'en tenir à des systèmes basés sur UART. Nous avons constaté que Les systèmes UART permettent de changer d'affichage ou de modifier facilement les réglages du moteur.. Une petite entreprise de vélos électriques pourrait préférer cette voie pour éviter d'être liée à un seul fournisseur - elle peut changer de fournisseur de moteur/contrôleur sans modifier l'ensemble de l'écosystème, tant que le protocole reste UART et qu'elle peut adapter le micrologiciel. D'autre part, Les marques qui se concentrent sur l'optimisation des systèmes et la conformité choisissent souvent CAN. Par exemple, les vélos électriques Bosch utilisent un bus de type CAN (Bosch dispose d'un protocole propriétaire basé sur CAN) qui relie le moteur, l'écran et la batterie. Cela garantit qu'aucune pièce tierce ne peut interférer ; tout est finement réglé ensemble. L'avantage est que la fiabilité et la sécurité sont excellentes - le système émet une erreur si quelque chose n'est pas conforme aux spécifications. L'inconvénient est qu'en tant qu'acheteur B2B (comme un équipementier de vélo choisissant Bosch), vous vous engagez à acheter le moteur, le contrôleur, la batterie et l'écran. tous de Bosch en tant que paquet.
- Vélos cargo - Considérations spécifiques : Les vélos-cargos, en particulier dans l'Union européenne, font souvent l'objet d'une surveillance plus stricte parce qu'ils peuvent transporter des charges plus lourdes, voire des passagers. En Allemagne, par exemple, il existe une norme (DIN 79010) spécifique à la sécurité des vélos-cargos (principalement des aspects mécaniques tels que la résistance du cadre et le freinage). Bien que cette norme ne dicte pas les protocoles de communication, la norme DIN 79010 ne s'applique pas aux vélos cargo. un état d'esprit axé sur la sécurité dans les vélos-cargos encourage l'utilisation d'un protocole qui garantit, par exemple, que si quelque chose ne va pas (surchauffe du moteur ou batterie faible), le système peut le communiquer et prendre les mesures qui s'imposent. La robustesse du protocole CAN et sa capacité à gérer les erreurs permettent d'atteindre ces objectifs de sécurité. En outre, les vélos électriques cargo fonctionnent souvent dans des environnements urbains (livraison dans les villes) où il y a beaucoup de bruit radio/électrique et où les enjeux sont élevés si une erreur de communication se produit au mauvais moment. Le système immunité au bruit du CAN est un atout majeur, car il permet d'éviter les erreurs de communication susceptibles d'entraîner un comportement erratique.


Normes de sécurité et conformité du système électrique (UE/États-Unis)
Quel que soit le protocole de communication utilisé, les systèmes électriques des vélos électriques doivent respecter les normes de sécurité afin de garantir un fonctionnement sûr et légal, en particulier sur les marchés clés comme l'Europe et les États-Unis. Le protocole de communication peut indirectement affecter la conformité d'un vélo - par exemple, un protocole qui permet des modifications illimitées par l'utilisateur peut présenter un risque de conformité, alors qu'un protocole verrouillé peut aider à garantir que le vélo reste dans les limites légales. Décortiquons les normes pertinentes et leurs liens :
Comment les protocoles de communication affectent-ils la conformité des vélos électriques dans l'Union européenne ?
Union européenne (UE) - EN 15194 : Dans l'UE, la plupart des vélos électriques (vélos à pédalage assisté dont la puissance du moteur est inférieure à 250 W et dont l'assistance est coupée à 25 km/h) sont classés dans les catégories suivantes APEC (Electronically Power-Assisted Cycles). La norme EN 15194 s'applique à l'APEC et définit les exigences et les méthodes d'essai en matière de sécurité et de performance. Cela comprend la sécurité mécanique (freins, cadre, etc.) et la sécurité électrique (câblage, CEM, etc.), ainsi que l'assurance que le vélo respecte les limites de vitesse et de puissance.
- Pour les protocoles de communication, un aspect important est la compatibilité électromagnétique (CEM)Le système ne doit pas émettre d'interférences excessives ou être indûment affecté par des interférences. Une ligne de communication CAN ou UART bien conçue doit passer les tests CEM (la norme EN 15194 renvoie à la norme EN 55014 ou à une norme similaire pour la CEM). La ligne de communication CAN ou UART la résistance au bruit du CAN peut être un avantage pour répondre à ces exigences en matière de CEM, car il gère mieux le bruit, mais les systèmes UART peuvent également être conformes s'ils sont correctement blindés.
- Altération de la vitesse et de la puissance : La norme EN 15194 exige que l'assistance se coupe à 25 km/h et que l'utilisateur ne puisse pas facilement régler cette limite au-delà de la valeur légale. Si un vélo utilise l'UART et que le fabricant laisse des pavés de programmation accessibles, un utilisateur pourrait potentiellement la déréglementer - ce qui pourrait poser des problèmes de conformité. Certains fabricants utilisent donc des systèmes CAN verrouillés spécifiquement pour empêcher les utilisateurs de modifier la limite de vitesse. Par exemple, la limite de vitesse des moteurs CAN de Bafang est fixe et ne peut être modifiée via l'écran, ce qui permet de garantir la conformité avec les réglementations dès la sortie de l'emballage. En revanche, sur de nombreux systèmes UART, un utilisateur avisé peut entrer dans le mode de paramétrage sur l'écran et modifier la taille des roues ou la limite, ou utiliser un câble de programmation, ce qui pourrait enfreindre la lettre de la loi s'il fait dépasser au vélo la vitesse d'assistance de 25 km/h.
- Sécurité électrique : La norme EN 15194 (dernières révisions) couvre la sécurité électrique de base, mais il est intéressant de noter que ne couvre pas entièrement la sécurité de la batterie - elle suppose que le bloc-batterie lui-même est conforme à d'autres normes. Elle se concentre davantage sur l'intégration, le câblage et la protection de base (pas de pièces sous tension exposées, etc.). Un protocole de communication n'a pas d'impact direct sur ce point, mais indirectement, un protocole comme CAN qui permet au BMS de communiquer avec le contrôleur peut améliorer la sécurité - par exemple, le BMS peut envoyer une commande "arrêter la décharge" si la batterie est en surchauffe. Bien qu'il ne soit pas imposé par la norme EN 15194, ce type de dispositif permet à un vélo de répondre aux attentes générales en matière de sécurité (éviter les emballements thermiques).
En outre, les vélos électriques cargos européens (en particulier ceux qui transportent des marchandises ou des passagers) pourraient devoir répondre aux exigences de la directive sur les véhicules utilitaires légers. Directive Machines s'ils ne sont pas strictement soumis aux règles applicables aux bicyclettes (c'est le cas de certains cycles de transport de marchandises lourdes). Cela met à nouveau l'accent sur des dispositifs de sécurité robustes. L'utilisation d'un protocole de communication solide avec un comportement à sécurité intégrée (comme le CAN qui s'arrête en cas d'erreur) peut contribuer à la conformité.
Plus d'informations sur Norme européenne pour les vélos électriques
Comment les protocoles de communication affectent-ils la conformité des vélos électriques aux États-Unis ?
États-Unis - UL 2849 et autres : Aux États-Unis, la fabrication des vélos électriques est un peu moins réglementée au niveau fédéral en ce qui concerne les performances (la définition d'un produit de consommation pour un vélo électrique à faible vitesse est de 750 W maximum et 20 mph avec l'accélérateur/28 mph avec l'assistance au pédalage, mais il n'y a pas de normes de construction obligatoires au niveau fédéral). Cependant, il n'y a pas de normes de construction obligatoires au niveau fédéral, la certification de la sécurité devient crucialeLes piles et les accumulateurs ne sont pas des produits de consommation courante, notamment en raison des risques d'incendie qu'ils posent.
- UL 2849 est la première norme de sécurité pour les systèmes électriques des vélos électriques en Amérique du Nord. Elle couvre l'ensemble du système d'entraînement électrique d'un vélo électrique, y compris la batterie, le moteur, le chargeur et toutes les interconnexions. Les tests UL 2849 examinent notamment si le câblage peut supporter les courants, si le système est protégé contre les courts-circuits et, surtout, s'ils intègrent les éléments suivants UL 2271 pour les batteries (qui est une norme de sécurité spécifique aux batteries). En ce qui concerne la communication, la norme UL 2849 ne prescrit pas de protocole, mais elle vérifie, par exemple, qu'en cas de perte de communication ou de détection d'un défaut, le système s'arrête en toute sécurité (pas d'événements thermiques, pas d'emballement du moteur). Un système basé sur CAN pourrait avoir un léger avantage en matière de redondance (par exemple, si le message d'accélération est perdu, CAN peut le détecter et l'interrompre de manière appropriée). Mais même les systèmes UART peuvent être conçus pour répondre à la norme UL 2849 (il suffit que le micrologiciel du contrôleur assure une gestion approfondie des défaillances).
- Prévention des incendies et des chocs électriques : Des normes telles que la norme UL 2849 visent à prévenir les incendies et les chocs électriques. Par exemple, si un vélo électrique est équipé d'un chargeur, la communication entre la batterie et le chargeur (s'il y en a une) ne doit pas entraîner de surcharge. Notamment, la norme Norme EnergyBus que nous avons mentionnée, qui est basée sur CAN, était en partie motivée par la sécurité - garantir que n'importe quel chargeur puisse charger n'importe quelle batterie en toute sécurité en communiquant sur CANopen et en n'autorisant l'alimentation que lorsque le handshaking approprié a été effectué . EnergyBus utilise un connecteur spécifique qui comprend des lignes de données CAN de sorte que le chargeur et la batterie établissent d'abord la communication, puis autorisent le courant de charge, afin d'éviter les étincelles ou les tensions inadaptées. Ce concept s'inscrit parfaitement dans la logique de sécurité des UL. Si une marque utilise EnergyBus, il est probable que cela l'aide à passer les certifications de sécurité, car il gère intrinsèquement des interactions sûres entre les composants.
- Conformité réglementaire (vitesse/puissance) : Aux États-Unis, le système de classes (vélos électriques de classe 1, 2 et 3) est largement basé sur l'honneur et n'est pas aussi strictement appliqué que les limites imposées par l'UE. Toutefois, pour des raisons de responsabilité, les fabricants veillent généralement à ce qu'un vélo électrique vendu en classe 2 ne puisse pas être facilement modifié pour dépasser 20 mph avec l'accélérateur, par exemple. Là encore, l'utilisation d'un protocole CAN fermé peut s'avérer utile : les utilisateurs ne peuvent pas simplement brancher un câble et dérégler le vélo. Il est à noter que de nombreuses entreprises de vélos électriques annoncent désormais des batteries ou des systèmes certifiés UL pour garantir la sécurité de leurs clients. Par exemple, HOVSCO (comme indiqué dans sa base de connaissances) souligne que ses vélos sont conformes à la norme UL 2849 pour la sécurité électrique et à la norme EN 15194 pour la conformité générale en matière de sécurité. Cela signifie que le câblage, les connecteurs et les communications doivent tous fonctionner sans présenter de risques.
Normes internationales et autres normes : Outre les normes EN 15194 et UL 2849, il existe d'autres normes pertinentes, par exemple, ISO 4210 (norme de sécurité pour les bicyclettes) avec une partie qui couvre les exigences relatives aux vélos électriques, et la norme allemande DIN 79010 pour les vélos-cargos (qui, comme nous l'avons noté, couvre des aspects tels que la résistance du cadre aux charges et les performances de freinage). Ces aspects ne concernent pas directement l'électronique, mais une norme relative aux vélos-cargos pourrait implicitement exiger que, par exemple, l'assistance ne fonctionne pas mal en cas de charge importante. Une communication robuste garantit que même si le vélo est sollicité (et peut-être que le bruit électrique augmente ou que la batterie s'affaiblit), les signaux entre la batterie, le contrôleur et les capteurs restent fiables.
En résumé, la conformité et la sécurité déterminent certaines décisions de conception entre UART et CAN. Un fabricant qui recherche une sécurité maximale peut privilégier le protocole CAN pour ses fonctions de contrôle et de vérification des erreurs, ou mettre en œuvre des mesures de protection supplémentaires sur les systèmes UART. Les deux protocoles peuvent faire partie d'une conception sûre, mais la manière dont ils sont utilisés est essentielle. Le protocole La nature fermée des systèmes CAN permet d'imposer le respect des règles (par exemple, les limites de vitesse ne sont pas réglables par les utilisateurs, comme l'exige la loi), alors que Les systèmes UART offrent une plus grande liberté d'utilisation, ce qui est une arme à double tranchant. Les fabricants doivent s'assurer que même les vélos basés sur la technologie UART disposent d'un limiteur physique ou logiciel qui ne peut pas être facilement piraté, afin de rester dans les limites légales.
Enfin, quel que soit le protocole, l'utilisation de des connecteurs et un câblage de qualité fait partie de la mise en conformité. Dans l'UE, le vélo doit supporter des vibrations sans que les fils se détachent, et dans des conditions humides sans qu'il y ait de court-circuit. Les connecteurs tels que Higo/Julet (connecteurs étanches largement utilisés dans les vélos électriques) sont appréciés non seulement pour leur commodité, mais aussi parce qu'ils contribuent à satisfaire aux exigences de l'UE. Indices IP et exigences de fiabilité. Un bus CAN utilise généralement de tels connecteurs (par exemple, un seul Higo à 4 ou 5 broches peut transporter les données CAN et l'alimentation d'un écran). Le choix du protocole ne modifie en rien la nécessité d'une bonne connectique. la décharge de traction, l'isolation et les connecteurs de verrouillage pour éviter les déconnexions (qui pourraient être dangereuses si, par exemple, le signal de coupure du frein n'atteignait pas le contrôleur parce qu'un câble s'est détaché).
Pour conclure cette section, l'Europe et les États-Unis accordent désormais une grande importance à la sécurité des vélos électriques. Le respect de normes telles que EN 15194 et UL 2849 est de plus en plus non négociable pour les marques réputées. Le protocole de communication est une pièce du puzzle - un moyen de s'assurer que le système électrique est coordonné et à l'abri des défaillances. La fiabilité du bus CAN peut aider à respecter ces normes en fournissant une communication robuste, tandis que les systèmes UART nécessitent une conception soignée pour être tout aussi sûrs. Les fabricants choisissent souvent le protocole qui correspond le mieux à la stratégie de conformité : UART pour les conceptions plus simples où le risque peut être facilement géré, ou CAN pour les systèmes complexes où les caractéristiques de sécurité sont remarquables.
Coûts et considérations de marché lors du choix des protocoles de communication
Lorsqu'il s'agit de choisir un protocole de communication (ou, plus généralement, de concevoir le système électrique d'un vélo électrique), le coût est un facteur important - non seulement le coût monétaire, mais aussi le "coût" en termes de flexibilité et de relations avec les fournisseurs. Voici comment les coûts se comparent et ce que les acheteurs ou les ingénieurs B2B prennent en compte :
- Coût du matériel : Comme indiqué précédemment, un système basé sur UART utilise généralement un matériel plus simple. Le contrôleur et l'écran ont juste besoin d'une capacité UART, que pratiquement tous les microcontrôleurs intègrent. Le câblage peut être un peu plus simple (moins de considérations de terminaison, etc.). Un système basé sur CAN exige un peu plus : une puce émettrice-réceptrice CAN pour chaque appareil, et éventuellement un MCU plus puissant (bien que de nos jours, même les MCU relativement bon marché intègrent CAN). La différence de nomenclature réelle peut être de l'ordre de quelques dollars par vélo en grande série, mais dans un marché concurrentiel, cela compte toujours. Pour une commande d'un grand parc de vélos, ces dollars se multiplient. Cela dit, la le coût du matériel CAN a baissé et le compromis pourrait être facilement justifié par la fonctionnalité supplémentaire apportée par le CAN.
- Coût de développement et d'intégration : Pour une start-up de vélos électriques ou une petite entreprise, le développement d'un système basé sur le réseau CAN à partir de zéro peut être coûteux si elle ne dispose pas d'une expertise interne. Cela peut impliquer l'embauche d'ingénieurs en systèmes embarqués connaissant le CAN, l'investissement dans des outils et le temps consacré au développement d'un micrologiciel personnalisé. Par ailleurs, si l'entreprise achète un système prêt à l'emploi (comme les unités d'entraînement Bosch ou Shimano, qui sont basées sur le réseau CAN), le coût de développement est moins élevé, mais le coût unitaire est plus élevé (les systèmes Bosch sont plus chers, en partie parce qu'ils offrent une solution entièrement intégrée et qu'ils bénéficient de la marque). A Le système UART peut souvent être assemblé à l'aide de composants disponibles sur le marché. avec une compatibilité connue - par exemple, de nombreuses entreprises utilisent des protocoles open-source ou standard où une grande partie de l'ingénierie est déjà réalisée et où le risque est moindre. Pour un acheteur B2B (par exemple une entreprise qui souhaite produire un grand nombre de vélos électriques sous sa marque), le choix du protocole UART peut signifier qu'il peut s'approvisionner en pièces génériques moins chères, alors que le choix du protocole CAN implique souvent de s'aligner sur l'écosystème d'un fournisseur particulier (qui peut facturer des licences ou des prix plus élevés).
- Coûts d'après-vente et de maintenance : Ce point est parfois négligé. Un opérateur de flotte (comme un vélo en libre-service ou une entreprise de livraison) peut constater que Les vélos-bus CAN permettent d'économiser de l'argent sur la maintenance. Pourquoi ? Parce qu'ils peuvent diagnostiquer les problèmes à distance ou plus rapidement. Un système connecté au réseau CAN peut signaler les codes d'erreur en détail (par exemple, "défaut du capteur de température de la batterie #2" en tant que code spécifique). Les techniciens peuvent brancher des outils de diagnostic sur le bus CAN pour localiser les problèmes. Cela peut réduire le temps de travail. En outre, comme nous l'avons vu dans le cas de l'IoT Venture, il est possible d'effectuer des mises à jour à distance du micrologiciel, ce qui permet d'économiser le coût d'un rappel physique des vélos pour certaines réparations. D'un autre côté, la maintenance initiale d'un vélo UART peut être plus simple (moins de problèmes de communication, peut-être), mais si quelque chose ne va pas, vous devrez peut-être procéder à des échanges de pièces par tâtonnement, car le système ne peut pas vous dire exactement ce qui ne va pas, à part peut-être le clignotement d'une LED. Pour un consommateur individuel, un vélo UART peut être moins cher à réparer parce qu'il peut utiliser des pièces de série et les connaissances de la communauté pour le réparer, alors qu'un vélo CAN peut l'obliger à s'adresser à un service agréé (potentiellement plus cher). Il y a donc un compromis de coût entre la facilité d'utilisation (UART wins) et aide au diagnostic avancé (CAN gagne, ce qui pourrait réduire les coûts des services professionnels).
- Coûts de licence et de propriété : L'utilisation d'un protocole CAN propriétaire pourrait entraîner des frais de licence ou des restrictions. Si une marque de vélo développe son propre protocole CAN, c'est parfait, mais si elle utilise quelque chose comme CANopen ou EnergyBus, elle devra peut-être adhérer à des normes et éventuellement rejoindre des associations (par exemple, EnergyBus e.V.). Ces coûts sont généralement faibles, mais ils méritent d'être soulignés. Les systèmes propriétaires comme ceux de Bosch signifient en fait que l'équipementier du vélo achète les unités d'entraînement comme un tout ; Bosch fixe le prix. Avec les systèmes UART, il y a souvent plus de concurrence entre les fournisseurs de pièces, ce qui peut faire baisser les prix.
- Perception du client et valeur : D'un point de vue marketing, une marque peut justifier un prix plus élevé pour un vélo doté d'une "électronique de bus CAN de qualité automobile", car cela semble avancé et fiable (même si le client ne voit pas directement la différence). Il y a de la valeur dans le sensation et performance de qualité supérieure que les systèmes CAN accompagnent souvent (ils sont généralement montés sur des vélos dotés de moteurs de haute qualité, etc.) ). Les marques qui visent le marché haut de gamme ou les clients commerciaux peuvent donc exploiter le système CAN dans le cadre d'une offre haut de gamme. À l'inverse, pour les vélos électriques d'entrée de gamme, les clients s'intéressent surtout au fonctionnement et au prix - ils ne paieront pas un supplément simplement parce que l'écran du vélo utilise CAN au lieu d'UART. C'est pourquoi.., le choix du protocole doit correspondre au segment de marché du vélo.
- La protection de l'avenir : Un des coûts pris en compte par les ingénieurs est le coût d'opportunité de ne pas être à l'épreuve du temps. Si vous investissez aujourd'hui dans une plate-forme basée sur UART, mais que l'année prochaine vous souhaitez ajouter de nouvelles fonctionnalités (par exemple une deuxième batterie ou un nouveau type de capteur), vous risquez de trouver l'ancienne plate-forme limitée, ce qui vous obligera à la reconfigurer. Certaines entreprises décident qu'il est plus rentable à long terme d'opter pour le protocole CAN dès le départ, même s'il n'est pas entièrement utilisé, afin de laisser une marge de manœuvre pour de nouvelles fonctions et de nouveaux accessoires. Cela peut permettre d'économiser des coûts de réaménagement à terme. Il s'agit d'une décision stratégique : payer un peu plus cher au départ plutôt que de payer beaucoup plus cher plus tard pour la mise à niveau.
En ce qui concerne les prix réels, il est difficile de les déterminer, mais un connaisseur du secteur pourrait dire, par exemple, qu'un ensemble contrôleur UART de base pour vélos électriques + affichage peut coûter, disons, $50-$100 en gros, alors qu'un ensemble équivalent basé sur le réseau CAN d'une grande marque peut coûter quelques centaines de dollars (parce qu'il est plus sophistiqué). Cependant, cette différence inclut souvent de meilleures performances du moteur, la garantie, etc. et pas seulement la différence de communication. Les coût différentiel purement pour le protocole (par exemple, l'ajout d'une puce CAN) est faible, mais le coût de l'installation est élevé. coût de l'écosystème (raccordement à un système coûteux ou à un système générique bon marché) peut être important.
En clair, pour un acheteur de vélos électriques B2B :
- Si votre priorité est coût unitaire le plus bas et que vous souhaitez avoir la possibilité de vous approvisionner auprès de plusieurs fournisseurs, une Système ouvert basé sur UART est intéressant. Vous pouvez rechercher des présentoirs et des contrôleurs adaptés, voire négocier avec plusieurs fabricants.
- Si votre priorité est performance, fiabilité et système clé en main (et que vous êtes prêt à payer pour cela), une Système basé sur le réseau CAN d'un fournisseur réputé peut vous éviter des maux de tête et ajouter de la valeur à votre produit (à un coût plus élevé, que vous récupérerez, espérons-le, en augmentant le prix de vos vélos ou en réalisant des gains d'efficacité en termes de volume).
Limites et tendances futures
Même si nous vantons les mérites de l'UART et du CAN, il est intéressant de noter que l'UART et le CAN ne sont pas des outils de communication à part entière. les limites de l'état actuel des communications sur les vélos électriques et de l'évolution de la situation :
- Absence de normalisation à l'échelle du secteur : Contrairement au monde de l'automobile où presque toutes les voitures utilisent le bus CAN et le système de diagnostic standardisé (OBD-II), le secteur des vélos électriques est encore fragmenté. Il existe pas de protocole universel unique que tous les vélos électriques utilisent. Les implémentations UART varient (chaque fabricant peut avoir des formats de données différents sur UART), et les implémentations CAN sont souvent propriétaires. Il s'agit d'une limitation pour les consommateurs et les assembleurs de vélos - il n'y a pas de "plug and play" entre les différentes marques. Vous ne pouvez pas prendre un écran quelconque et vous attendre à ce qu'il fonctionne avec un contrôleur quelconque, à moins qu'ils n'utilisent explicitement le même protocole et le même micrologiciel. EnergyBus est un effort prometteur de normalisation (avec CANopen CiA-454 qui définit les messages pour les composants des vélos électriques), mais il n'est pas encore généralisé. Si EnergyBus ou des normes similaires gagnent du terrain, nous pourrions voir des composants réellement interopérables - par exemple, une batterie du fabricant X pourrait être utilisée avec un système de moteur du fabricant Y, le protocole basé sur CANopen garantissant qu'ils se comprennent mutuellement. Cela profiterait aux acheteurs B2B (plus d'options de fournisseurs) et aux consommateurs (plus d'options de mise à niveau/réparation). Cependant, les acteurs de l'industrie ont également des motivations commerciales pour maintenir des systèmes propriétaires (pour verrouiller les clients). La tension entre normalisation ou contrôle propriétaire façonnera l'avenir des protocoles relatifs aux vélos électriques.
- Besoins en bande passante et en données : Actuellement, les communications des vélos électriques sont relativement pauvres en données. Mais les futurs vélos électriques pourraient transmettre davantage d'informations - imaginez la collecte de données de capteurs de couple à haute fréquence, ou de mesures de puissance à haute résolution à des fins de formation, ou même de vidéos provenant de caméras à des fins de sécurité. Le réseau CAN à vitesse classique peut devenir un goulot d'étranglement si un grand nombre de données doivent être envoyées. L'industrie automobile dispose de CAN-FD (une version étendue de CAN avec des trames de données plus grandes et un débit plus élevé) et d'autres protocoles comme Ethernet pour les besoins de bande passante élevée. Pour les vélos électriques, CAN-FD pourrait éventuellement apparaître si nécessaire, ou BLE/Wi-Fi pour décharger les journaux de données. Communication sans fil pourrait également compléter les protocoles câblés : de nombreux vélos électriques utilisent déjà la technologie Bluetooth Low Energy pour connecter le vélo à une application pour smartphone. Cela n'entre pas dans le cadre du système électrique interne, mais mérite d'être noté en tant que canal parallèle. Peut-être qu'à l'avenir, certains vélos électriques plus simples pourraient même renoncer à un affichage câblé et utiliser un module sans fil vers un téléphone - bien que les commandes critiques (comme les signaux d'accélération ou de freinage) resteraient probablement câblées pour des raisons de fiabilité. Dans les flottes de transport de marchandises, nous pourrions assister à une plus grande intégration de la communication V2X (vehicle-to-everything) - les vélos électriques communiquant avec les systèmes logistiques ou les infrastructures de circulation, ce qui, là encore, serait superposé au système de base du bus CAN.
- Problèmes de sécurité : Les vélos électriques sont de plus en plus connectés et utilisent des moyens de communication de plus en plus complexes, cybersécurité devient un problème. Un système UART sans connectivité externe est pratiquement à l'abri du piratage (quelqu'un devrait physiquement se brancher sur les fils). Mais un bus CAN qui s'interface avec un module Bluetooth ou un module GSM (pour le suivi des flottes) présente des vulnérabilités potentielles. Les fabricants devront s'assurer que leurs protocoles (en particulier les interfaces sans fil avec le bus) sont sécurisés afin d'éviter tout contrôle malveillant (imaginez un piratage de l'IdO qui pourrait désactiver à distance une flotte de vélos de livraison - un scénario tiré par les cheveux mais théoriquement possible s'il n'est pas sécurisé). Par nature, les protocoles propriétaires sont quelque peu sécurisés par l'obscurité, mais à mesure que le CAN se répand dans les vélos électriques, des acteurs malveillants pourraient tenter d'injecter des messages CAN via un port exposé. Il est donc possible que nous assistions à l'avenir à un renforcement du cryptage ou de l'authentification dans les communications des vélos électriques.
- Expérience de l'utilisateur : En fin de compte, quel que soit le protocole utilisé, il doit offrir une bonne expérience à l'utilisateur. Les conducteurs s'intéressent à des éléments tels que la fourniture d'énergie en douceur, l'affichage d'informations précises et le fonctionnement des dispositifs de sécurité en cas de besoin. L'une des limites des premiers systèmes basés sur le protocole CAN était qu'ils étaient parfois aussi Les utilisateurs se sentaient frustrés de ne pas pouvoir modifier de simples préférences. Au fur et à mesure de la maturation des systèmes, les fabricants pourraient trouver des moyens de donner de la souplesse aux utilisateurs (par le biais d'applications ou de paramètres autorisés) sans compromettre le contrôle. Par exemple, une application pourrait permettre un réglage limité (dans des limites sûres) même sur un système CAN, ou autoriser des accessoires tiers certifiés à communiquer sur le bus (peut-être en utilisant les messages standard EnergyBus). Nous pouvons nous attendre à un peu plus d'ouverture au fur et à mesure que les protocoles se normaliseront, ironiquement même dans un monde CAN.
En conclusion, le Le système de communication électrique des vélos électriques - qu'il s'agisse d'UART ou de CAN - est crucial pour la performance, la sécurité et la modularité du vélo.. Les ingénieurs qui conçoivent des vélos électriques doivent trouver un équilibre entre la simplicité de l'UART et la sophistication du CAN. Les acheteurs B2B doivent tenir compte de l'incidence de ce choix sur les coûts, la chaîne d'approvisionnement et la proposition de valeur de leur produit. L'industrie semble s'orienter vers le bus CAN à mesure que les vélos électriques évoluent vers des machines plus connectées et plus performantes, mais les systèmes à base d'UART resteront probablement en parallèle pour les modèles plus simples et moins coûteux pendant un certain temps (ils sont, après tout, "suffisamment bons" pour un vaste segment de cyclistes).
En comprenant ces protocoles de communication - essentiellement les langage électrique des vélos électriques - on comprend beaucoup mieux le fonctionnement interne d'un vélo électrique. Qu'il s'agisse de la rotation de l'accélérateur ou de la pression exercée sur la pédale, de la poussée du moteur ou des chiffres affichés sur l'écran, tout cela est rendu possible par des bits et des octets qui se déplacent le long des fils, garantissant ainsi que les vélos électriques fonctionnent correctement. la batterie, le moteur et le pilote sont synchronisés. Qu'il s'agisse d'un vélo électrique urbain élégant ou d'un gros transporteur de marchandises, c'est cette harmonie qui donne l'impression que le trajet se fait sans effort et en toute sécurité. En fin de compte, l'objectif de tout protocole est de faire passer la technologie à l'arrière-plan afin que les cyclistes puissent simplement profiter du voyage - mais maintenant, espérons-le, avec un peu de compréhension de l'impressionnante coordination électronique qui se déroule sous leurs pieds.
Sources :
- Qiolor Ebike Guide - "Comment choisir un écran compatible avec votre contrôleur Ebike ? (2025) - discussion sur les langages UART et CANBUS et sur l'importance de l'adéquation des protocoles.
- Velco.tech - "CAN vs UART : différences entre les modes de communication" (2024) - Explication de la simplicité de l'UART par rapport aux capacités de réseau du CAN et énumération de leurs avantages/limites .
- Centre d'aide Biktrix - "Quels sont les protocoles CANBUS et UART ? - point de vue de l'utilisateur sur la façon dont CAN verrouille les paramètres (limite de vitesse fixe) par rapport à UART qui permet des modifications, ainsi qu'une comparaison de l'interchangeabilité de l'affichage.
- IoT Venture (étude de cas avec la flotte CYCLE) - description des avantages de l'intégration du réseau CAN dans les flottes de vélos électriques : accès aux données de maintenance, désactivation du moteur à distance, mises à jour OTA.
- HOVSCO Connaissances - "Quels sont les dispositifs de sécurité des vélos électriques ? - notes sur la norme EN 15194 (UE) garantissant les limites de vitesse/puissance et la durabilité, et sur la norme UL 2849 (États-Unis) axée sur la sécurité électrique/incendie, ainsi que sur la norme DIN 79010 relative à la sécurité des vélos-cargos.
- Texas Instruments App Note - "Considérations sur la conception matérielle d'un vélo électrique utilisant un moteur BLDC". - a fourni des schémas fonctionnels de systèmes typiques de vélos électriques et un aperçu de l'électronique de commande.
- Letrigo Ebike Connaissances - "Le câblage de l'écran de l'E-bike expliqué". - détaille le câblage et les connecteurs (Higo/Julet) et prévient qu'il n'existe pas de norme de câblage universelle, en mettant l'accent sur la bonne adaptation des connexions et sur un câblage robuste pour l'intégrité du signal.
- Norme EnergyBus - Introduction de Kvaser - décrivant EnergyBus comme une norme ouverte basée sur CANopen pour les composants LEV afin d'assurer la compatibilité et la sécurité entre les fabricants.




