カーゴe-bikeを含む電動自転車(e-bike)は、バッテリー、モーター、コントローラー、センサー、ユーザーインターフェースをつなぐ複雑な電気システムに依存している。このシステムの通信プロトコルは、これらすべてのコンポーネントがシームレスに連携するための「言語」として機能する。この一般的な科学の概要では、これらの通信プロトコルがどのようなもので、e-bikeの電気システムでどのように機能するかを説明します。使用されるプロトコルの種類、違い、それぞれの適用場所、長所と短所、コスト、EUと米国の安全基準への準拠、制限について説明します。目標は、技術的な深さと実用的な理解のバランスをとりながら、お客様や視聴者のために明確で権威のあるガイドを提供することです。
E-Bikeの主要コンポーネント - "神経系"
E-バイクは、すべての重要なコンポーネントをつなぐワイヤーとデータリンクの中枢神経系を持っていると考えることができる。神経が体内で信号を伝達するように、ワイヤーハーネスはバイク全体で電力とデータ信号の両方を伝達する。典型的なe-bike電気システムの主要コンポーネントには、以下のものがある:

- バッテリーパック:システムにエネルギーを供給する直流電源(一般に36~48V)。太い電源ケーブル(安全のためヒューズまたはブレーカー付き)を介してコントローラに接続し、主電流を供給する。一部の高度なバッテリーは、コントローラとステータスまたは制御信号を共有するためのデータリンク(通信回線経由)も備えています。
- モーターとコントローラー:モーター(ホイールのハブモーターまたはクランクのミッドドライブ)は、ライダーからの入力とセンサーからのフィードバックに基づいてモーター出力を調整する "頭脳 "であるモーターコントローラーから電力を受け取る。コントローラーはマイクロプロセッサーを搭載した電子ユニットで、信号(スロットル、ペダルセンサー、ブレーキなど)を受け取り、モーターへの電力を管理する。モーターには通常、フェーズワイヤー(電力を運ぶ太いケーブル)とセンサーワイヤー(ローター位置をフィードバックするホール効果センサーからの細いケーブル)があり、コントローラーに接続されています。
- ヒューマンインターフェース(スロットル、ペダルセンサー、ディスプレイ):ライダーは、スロットル(多くの場合、速度を要求する可変電圧信号を出力するホール効果センサーを備えたハンドルバーグリップ)や、磁石とセンサーを介してペダリングモーションを検出するペダルアシストセンサー(PAS)などのデバイスを介して、e-bikeと通信する。ハンドルバーのディスプレイユニットには、速度、バッテリー残量、アシストレベルなどが表示され、多くの場合、ライダーが設定を調整するためのボタンが含まれている。ディスプレイとコントローラーは、電源と通信ラインを含むマルチワイヤーケーブルを介してデータを交換する。
- 安全カットオフ(ブレーキレバー):E-bikeのブレーキレバーには通常カットオフスイッチがあり、ブレーキをかけるとモーター電力を即座にカットする信号をコントローラに送る。通常、このスイッチにはシンプルな2線式回路が使用され、コントローラへのオン/オフ信号として機能する。
- 照明とアクセサリー:多くのe-bikeは、フロント/リアライト、ホーン、USB充電器なども内蔵している。これらはメインコントローラーで制御されるか、別回路で動作するが、ハイエンドシステムでは通信バス経由でアドレス指定することもできる。
e-bikeとカーゴバイク用アクセサリーの詳細ガイドについては、以下をご覧ください。 より包括的な答えについては、この記事をお読みください。 あるいは、私たちの カーゴバイク101ページ.
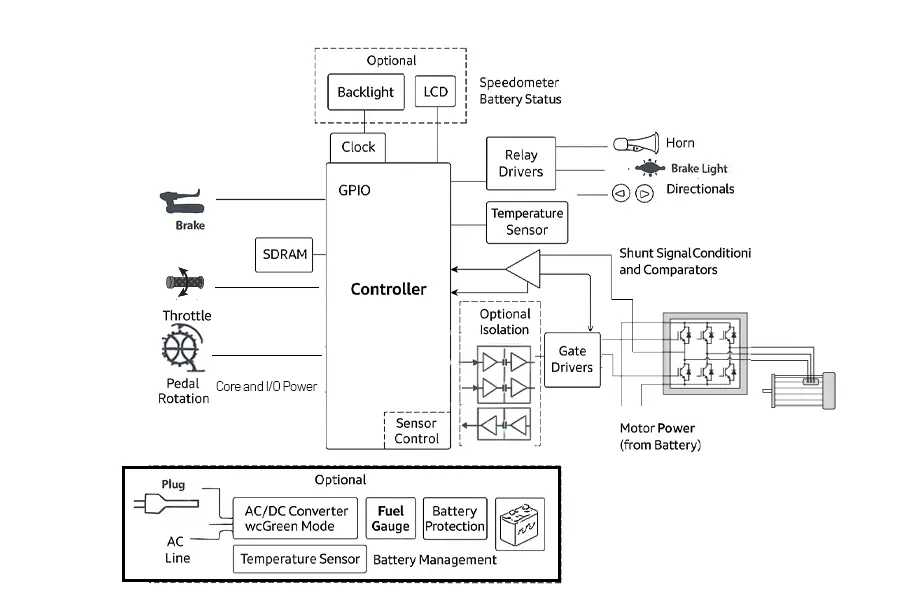
図2:典型的な電動自転車制御およびバッテリー管理システムのブロック図。中央コントローラーは、主要入力(スロットル、ペダルセンサー、ブレーキレバー)とインターフェースし、ゲートドライバー、リレードライバー、GPIO接続を介してモーター駆動信号などの出力を管理する。LCDディスプレイ、バッテリー充電器、燃料計、バックライトなどのオプションモジュールは、システム機能を拡張します。コンポーネント間の通信は、モーター電源、照明、安全カットオフ、バッテリー状態監視のリアルタイム調整をサポートします。
E-Bikeの通信プロトコルとは?
e-bikeの文脈では、通信プロトコルは電子部品がデータを交換する方法と形式を指す。初期の、あるいは基本的なe-bikeは、複雑なデジタルネットワークを持たないことが多く、多くの信号はアナログか、単純なオン/オフ回路だった。例えば、スロットルはアナログ電圧を送信してライダーが望むパワーを示し、ブレーキスイッチは単純に回路を開閉してパワーをカットする。しかし、スマート・ディスプレイ、高度なセンサー、さらにはGPSやスマートフォンとの統合など、e-bikeがより洗練されるにつれ、より強固なデジタル通信の必要性が生じた。
今日、2つの主要なデジタル通信プロトコルがe-bikeシステムを支配している:
- UART(Universal Asynchronous Receiver-Transmitter):2つのデバイス(通常はコントローラとディスプレイ)間で直接1対1のデータリンクを作成するシリアル通信方式。
- CANバス(コントローラー・エリア・ネットワーク):複数のデバイス(コントローラー、ディスプレイ、バッテリーBMS、センサーなど)が同じ共有バスワイヤー上で通信できるネットワークプロトコル。
UARTとCANバスに加えて、2つの通信プロトコルがe-bikeシステムで使用されることがある:
- SIF(シリアル・インターフェース・フォーマット): これは、特定のブランドのシステム(シマノSTEPSや古いディスプレイユニットなど)によく見られる独自のプロトコルまたは簡易プロトコルです。通常、コントローラとディスプレイまたはリモートボタン間の基本的なデータ交換に使用されます。SIFはオープンな標準化と柔軟性に欠けるため、ほとんどの場合、特定のブランドやレガシーモデルに限られています。
- RS-485(推奨規格485): RS-485は、長距離の信頼性と耐ノイズ性で知られる工業用シリアル通信プロトコルである。コンシューマー向けe-bikeではUARTやCANほど一般的ではありませんが、次のような用途で使用されています。 一部のハイエンドまたは商用フリートシステム特に、シェアバイクやレンタルバイク、ヘビーデューティーe-bikeのように、堅牢性と拡張配線が要求される場合には。
これらのプロトコルは、基本的にe-bikeの電子機器の「言語」である。すべてのコンポーネントが同じ言語を話せば、情報は正しく流れます。そのため、例えばディスプレイとコントローラーをペアリングする際には、プロトコルを合わせることが重要です。プラグが適合しても、プロトコルに互換性がなければ、部品は一緒に動作しません。
市場利用概況(2024-2025年推定動向)
e-bike市場におけるプロトコルの使用内訳は、業界の見識や主要なシステムベンダー(Bosch、Bafang、Shimano、Mahleなど)から普遍的に公表されているわけではないが、以下のようなものがある。 妥当な推定分布 2025年現在
| プロトコル | 利用シェア(推定) | 一般的なアプリケーション | 備考 |
|---|---|---|---|
| UART | ~50-60% | エントリーからミドルレンジのE-バイク | シンプルで安価なため、広く使用されている |
| CANバス | ~30-35% | ハイエンド、スマート、またはモジュール式e-bike | スマートな統合で採用を拡大 |
| RS-485 | ~5-10% | フリート・システム、ロングワイヤー・コマーシャル・セットアップ | 特定のユースケースに限定 |
| SIF / プロプライエタリ | <5% | ブランド固有のシステムやレガシーシステム | 主に古い生態系やロックされた生態系で見られる |
注: これらの数値は世界市場(EU、CN、NA)で一般化されたもので、OEMの動向、公開文書、ティアダウンデータ、部品サプライヤーの洞察に基づいている。
E-Bikeの通信プロトコルをより簡単に定義する。
簡単に言うと、e-bikeの通信プロトコルは次のようなものだ。 異なる電子部品が互いに会話するための言語やルール.部品が同じ言語を話さなければ、たとえプラグが物理的に適合していても、お互いを理解することはできない。
📞 類似性:一対一の電話 vs. グループチャット
e-bikeのプロトコルを理解するために、日常生活における2つのコミュニケーション方法を想像してみよう:
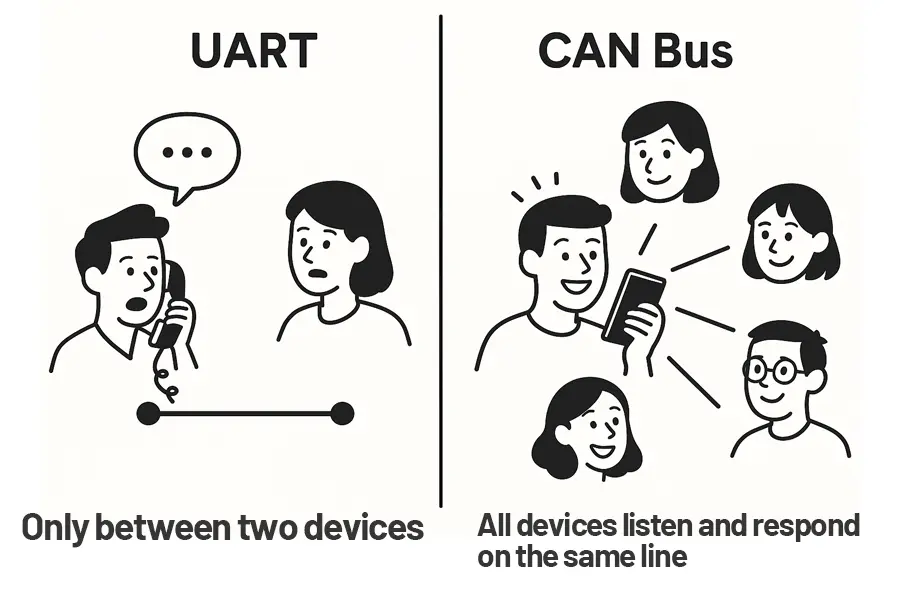
UART:1対1の電話のようなもの
- UART(Universal Asynchronous Receiver-Transmitter)は、電話で一人の友人を呼び出すようなものだ。
- のみ 2つのデバイス ディスプレイとコントローラーのように、一度に話すことができます。
- 他の機器と話したい場合は 別のワイヤー (または別の電話)。
- シンプルだが、多くのデバイスがある場合は拡張性がない。
- 共通 基本的なe-bikeシステム 限られた機能しかない。
ANバス:グループチャットのようなもの
- CANバス(コントローラー・エリア・ネットワーク)は、次のようなものです。 グループチャット WhatsAppやWeChatで。
- すべてのデバイス (コントローラー、バッテリー、ディスプレイ、センサー、ライト)が同じチャットルームにいる。
- 各メッセージには送信者IDがタグ付けされ、各デバイスは自分宛のメッセージだけを読む。
- それはずっと より効率的 多くのコンポーネントが協調して動作する必要がある場合に理想的だ。
- で使用される。 スマートで先進的なe-bikeシステム多くの場合、GPS、ブルートゥース、アプリが統合されている。
| 特徴 | UART(電話) | CANバス(グループチャット) |
|---|---|---|
| 接続の種類 | 1対1(ポイント・トゥ・ポイント) | 1対多(共有バス) |
| スケーラビリティ | 低 - より多くのデバイスのために余分な配線が必要 | 高 - 複数のデバイスが同じワイヤーを共有 |
| コミュニケーションの流れ | 2つのデバイス間のみ | すべてのデバイスが同じ回線でリッスンし、応答する |
| 複雑さ | シンプル | より複雑だが強力 |
| ユースケース | ベーシックe-bike(ディスプレイ↔コントローラーのみ) | BMS、アプリ、センサーなどを備えたスマートなe-bike。 |
コミュニケーション・プロトコルの役割
e-bikeにおける通信プロトコルは、いくつかの重要な役割を果たす:
- データ共有:コントローラーがリアルタイムでデータをディスプレイに送信し(速度、バッテリーの充電状態、エラーコード)、コマンドを受信します(アシストレベルの変更、ライトのオン/オフなど)。適切なプロトコルがないと、信頼できる速度測定値が得られなかったり、設定を調整できなかったりする可能性があります。
- コンポーネントの調整:高度なシステムでは、複数のマイクロコントローラーが協調する必要があります。例えば、独自のバッテリー管理システム(BMS)を備えたスマートバッテリーは、過電流を防止したり、正確なバッテリーパーセントを表示したりするために、モーターコントローラと通信することがあります。CANバスや同様のネットワークにより、バッテリー、モーター・コントローラー、ディスプレイ、さらにはセンサーまでが、マルチノード・ネットワークで情報を共有することができます。
- 安全性と信頼性:よく設計されたプロトコルは、障害や信号の損失(ケーブルの損傷など)が発生した場合、システムがそれを検出し、安全なアクション(モーター電源の切断など)を取ることを保証します。CANのような堅牢なプロトコルには、エラーチェックとメッセージの優先順位付けが含まれており、このようなエラーに対処します。スロットルワイヤーが緩んだ場合、安全規定がない限り、コントローラーはノイズをスロットル信号と誤認するかもしれません。
- 拡張性:機能が豊富なe-bike(GPSトラッカー、盗難防止イモビライザー、複数のアシストセンサーなど)にとって、通信ネットワークはデバイスの追加や削除を容易にします。新しいデバイスごとにコントローラーへの専用配線リンクが必要になる代わりに、デバイスは共通バスに参加し、他のすべてのデバイスとデータを共有することができます。この拡張性が、最近のハイエンドe-bikeがCANバスに移行している主な理由です。
要約すると、通信プロトコルはe-bikeの電気システムのバックボーンであり、すべての電子部品が協調して動作することを保証します。別の記事では、2つの主なプロトコルタイプ(UARTとCAN)について掘り下げ、それぞれがどのように機能するのか、またe-bikeにおけるそれぞれの使用例を検証します。 カーゴe-バイク興味があればチェックしてほしい:
- 「E-BikeのUARTを理解する:シンプルなシリアル通信であなたのバイクをパワーアップ"
- UARTがどのようにディスプレイやコントローラーなどのe-bikeコンポーネント間の基本的なデータ交換を可能にするかについて、初心者にもわかりやすく解説しています。
- 「E-BikeにおけるCANバスとは?バッテリーやセンサーなどをよりスマートに接続する方法"
- 最新のe-bikeがどのようにCANバスを使用して、マルチデバイス通信、高度なディスプレイ、システム診断をサポートしているかを学びます。
アプリケーションシナリオ:どのE-Bikeにどの通信プロトコルを使うか?
さまざまなe-bikeの設計において、UARTとCANが実際にどのように選択されているかを理解することは有益です。ここでは、2つの大まかなカテゴリーについて説明します: コンシューマー向けe-bike(一般的な通勤用自転車やレジャー用自転車を含む) そして カーゴ/フリートe-バイク(業務用配送やレンタル・フリートでよく使用される)これらの優先順位はしばしば異なる。

- 一般消費者向けE-Bike(シティ、マウンテン、ロード): これらは、多くの個人が個人用に購入するバイクである。エントリーレベルから非常にハイエンドなものまであります。ローエンド(コスト重視のモデル)では、UART通信が極めて一般的です。例えば、ケイデンス・ペダル・センサーと基本的なLEDディスプレイを備えた36Vのシンプルな通勤用e-bikeは、コントローラと最小限のディスプレイの間でUART(またはアナログ信号)を使用している可能性が高い。ここでの焦点は コストパフォーマンスと基本機能.このようなバイクの多くは、事実上のUARTプロトコルに準拠する広く入手可能なコントローラとディスプレイを使用しているため、バイクブランドは異なるOEMからコンポーネントを調達することができます。これは、例えばベンダーAのより良いディスプレイをベンダーBのコントローラーで使用する柔軟性を求めるB2Bバイヤーにとって魅力的である。ハイエンドのコンシューマーバイク、特に大手ブランドが製造するバイクでは、CANバスの傾向がある。トルクセンサーや派手なディスプレイを備えた高性能なe-MTBやe-ロードバイクは、すべてをスムーズに統合するためにCANを使うかもしれない。しかし、ハイエンドバイクでもUARTやその他の独自のシリアルリンクを使用しているブランドもあります。

- 貨物用E-バイクと商業用フリート: 貨物用e-bikeは、重い荷物や乗客を運ぶために設計されており、多くの場合、企業(宅配便、郵便バイクなど)で使用されている。これらのバイクは、以下のことを優先する傾向がある。 堅牢性、安全性、車両管理能力 電子機器のコストを上回るCANバスが本格的に普及したのは、この分野だ。例えば、カーゴバイクには デュアルバッテリー 2つのバッテリーを管理するには、放電のバランスを取ったり、少なくともそれぞれのステータスを報告するための通信が必要です。CANを使えば、1つのコントローラーで2つのBMSユニット(各バッテリーに1つずつ)と同じバスで簡単に通信できる。また、カーゴバイクには、ブレーキライト、方向指示器、電子ロックなどのアクセサリーが追加されている場合があります。これらを中央バスで調整することで、配線と制御が簡単になります。さらに、貨物用e-bikeはフリートで運行されることが多いため、企業は以下のようなものを好む。 テレマティクス を搭載している:GPSトラッカーは、バイクの位置、使用状況、故障を報告することができる。CAN対応システムであれば、テレマティクス・モジュールは単純に速度やバッテリー状態などのCANメッセージを盗聴し、その情報をアップロードすることができる。実際、欧州の配送車両を対象としたあるケーススタディでは、CANバスを利用することで、走行距離などのメンテナンスデータの遠隔監視、盗難防止のための遠隔モーター無効化、バイクのファームウェアの無線アップデートなどが可能になることが実証されている。UARTベースのバイクにこれを実装するのは面倒だろう。
- ミックス・アンド・マッチ対統合システム: e-bikeブランドがコンポーネントを自由に組み合わせたり、アフターマーケットでのアップグレードを可能にしたい場合、UARTベースのシステムにこだわる傾向がある。私たちは次のように考えました。 UARTシステムにより、ディスプレイの交換やモーター設定の微調整が容易に行えます。.プロトコルがUARTのままで、ファームウェアを適応させることができる限り、エコシステム全体を変えることなく、モーターやコントローラーのサプライヤーを変えることができる。その一方で システムの最適化とコンプライアンスを重視するブランドは、しばしばCANを選択する。.例えば、ボッシュ製のe-bikeは、モーター、ディスプレイ、バッテリーをつなぐCANのようなバス(ボッシュは独自のCANベースのプロトコルを採用している)を使用している。これにより、サードパーティの部品が干渉することはなく、すべてが細かく調整されている。その利点は、優れた信頼性と安全性である。仕様外のことがあれば、システムがエラーをスローする。欠点は、(ボッシュを選ぶ自転車OEMのような)B2Bバイヤーとして、モーター、コントローラー、バッテリー、ディスプレイを購入することになることだ。 すべて ボッシュからパッケージとして発売されている。
- カーゴバイク - 具体的な検討事項: カーゴバイクは、特にEUでは、より重い荷物や乗客さえも運ぶ可能性があるため、より厳しい審査に直面することが多い。例えばドイツでは、カーゴバイクの安全性(主にフレーム強度やブレーキなどの機械的な側面)に特化した規格(DIN 79010)がある。この規格では通信プロトコルは規定されていないが 安全第一の考え方 カーゴバイクでは、例えば、何か問題が発生した場合(モーターの過熱やバッテリーの低下)、システムがそれを確実に伝達し、対策を講じることができるプロトコルを使用することが推奨されています。CANの堅牢性とエラー処理は、このような安全目標を達成するのに役立つ。さらに、貨物用e-bikeは、無線/電気ノイズの多い都市環境(都市部での配送)で使用されることが多く、誤ったタイミングで通信エラーが発生した場合のリスクは高くなります。そのため CANのノイズ耐性 この点は大きなプラスで、不規則な行動につながるミスコミュニケーションを防ぐことができる。


電気システムの安全基準とコンプライアンス(EU/US)
使用される通信プロトコルにかかわらず、e-bikeの電気システムは、特に欧州や米国などの主要市場において、安全かつ合法的に動作するよう安全基準を遵守する必要があります。通信プロトコルは、間接的にバイクのコンプライアンスに影響を与える可能性があります。例えば、ユーザーが無制限に改造できるプロトコルはコンプライアンス・リスクをもたらす可能性がありますが、ロックダウンされたプロトコルはバイクが法的制限内にとどまることを保証するのに役立ちます。それでは、関連する規格とその関連性について説明しよう:
通信プロトコルがEUのe-bikeコンプライアンスに与える影響
欧州連合(EU) - EN 15194: EUでは、ほとんどのe-bike(モーター出力が250W未満で、時速25kmでアシストが切れるペダルアシスト自転車)は以下のように分類されている。 エパックス (電子パワーアシストサイクル)。標準的な EN 15194 はEPACに適用され、安全性と性能に関する要件と試験方法を定義している。これには、機械的安全性(ブレーキ、フレームなど)、電気的安全性(配線、EMCなど)、さらに自転車がスピードとパワーの制限を満たしていることが含まれる。
- 通信プロトコルの場合、関連する側面の1つは 電磁両立性(EMC)システムは過度の干渉を発したり、干渉の影響を過度に受けたりしてはなりません。適切に設計されたCANまたはUART通信ラインは、EMCテストに合格する必要があります(EN 15194は、EMCについてEN 55014または同様のものを参照しています)。その CANの耐ノイズ性 UARTシステムも適切にシールドされていれば、EMC要件に適合することができます。
- スピードとパワーの改ざん: EN 15194では、時速25kmでアシストが切れること、そしてこの制限値をユーザーが簡単に法定値以上に調整できないことが要求されています。自転車がUARTを使用し、メーカーがプログラミング・パッドにアクセス可能な状態にしている場合、ユーザー 可能性がある これは、コンプライアンス上の問題を引き起こす可能性があります。そのため、一部のメーカーは、ユーザーが制限速度を変更できないように、特にロックされたCANシステムを使用しています。例えば、BafangのCANベースのモーターは、制限速度を固定し、ディスプレイで変更できないようにしています。対照的に、多くのUARTシステムでは、精通したユーザーがディスプレイから設定モードに入り、ホイールサイズや制限速度を微調整したり、プログラミングケーブルを使用したりすることができる。
- 電気安全: EN 15194(最新改訂版)は、基本的な電気安全をカバーしているが、興味深いことに バッテリーの安全性を完全にカバーしていない - バッテリーパック自体が他の規格に適合していることが前提です。この規格は、統合、配線、基本的な保護(露出した可動部品を使用しないなど)に重点を置いています。通信プロトコルは直接的には影響しませんが、間接的には、BMSがコントローラと通信できるCANのようなプロトコルは安全性を高めることができます。EN 15194で義務付けられているわけではありませんが、このような機能はバイクが一般的な安全性(熱暴走の回避)を満たすのに役立ちます。
さらに、欧州の貨物用e-bike(特に荷物や乗客を運ぶもの)は、以下の条件を満たす必要があるかもしれない。 機械指令 厳密に自転車規則に該当しない場合(一部の重い貨物用自転車は該当する)。この場合も、堅牢なフェイルセーフが重視される。フェイルセーフ動作(故障時にCANがシャットダウンする等)を備えた強固な通信プロトコルを使用することで、コンプライアンスを支援することができる。
詳細情報 e-bikeのEU規格
通信プロトコルが米国におけるe-bikeのコンプライアンスに与える影響
米国 UL2849他: 米国では、e-bikeの製造は連邦レベルでの性能規制がやや緩い(消費者製品として、最大出力750W、スロットル時速20マイル、ペダルアシスト時速28マイルという低速e-bikeの定義があるが、連邦政府による強制的な製造基準はない)。しかし 安全認証が重要になっている特にバッテリーからの発火が懸念されるためだ。
- UL 2849 は、北米におけるe-bikeの電気系統に関する主要な安全基準である。バッテリー、モーター、充電器、すべての相互接続を含む、e-bikeの電気駆動システム全体をカバーしています。UL 2849試験では、配線が電流に耐えられるかどうか、システムが短絡から保護されているかどうか、そして重要な点として、以下の項目が含まれます。 電池用UL 2271 (バッテリーに特化した安全規格である)。通信に関しては、UL2849はプロトコルを規定していませんが、例えば、通信が途絶えたり、故障が検出されたりした場合、システムが安全に故障する(サーマルイベントが発生しない、モーターが暴走しない)ことをチェックします。CANベースのシステムは、冗長性(例えば、スロットルメッセージが失われた場合、CANはそれを検出し、適切にタイムアウトすることができます)を証明する上で若干有利かもしれません。しかし、UARTシステムでさえ、UL2849に適合するように設計することができます(コントローラーのファームウェアに徹底した故障処理が必要なだけです)。
- 火災と感電の防止: UL 2849のような規格は、電気火災や感電の防止に重点を置いている。例えば、e-bikeに充電器が接続されている場合、バッテリーと充電器(もしあれば)の間の通信は過充電につながるものであってはならない。注目すべきは エネルギーバス規格 どの充電器でも、CANopenで通信し、適切なハンドシェーキングが行われた場合にのみ電源を有効にすることで、どのバッテリーでも安全に充電できるようにするためです。EnergyBusは、CANデータラインを含む特定のコネクターを使用しているため、充電器とバッテリーはまず通信を確立し、その後充電電流を許可することで、スパークや電圧の不一致を避けることができます。このコンセプトは、ULの安全ロジックに合致しています。EnergyBusを使用しているブランドは、コンポーネント間の安全な相互作用を本質的に管理しているため、安全認証の合格に役立つ可能性が高い。
- 規制遵守(スピード/パワー): 米国では、クラス制度(クラス1、2、3のe-bike)は主に優等生制度であり、EUの制限ほど厳しく取り締まってはいないが、責任上の理由から、メーカーは通常、クラス2として販売されるe-bikeを、例えばスロットルで時速20マイルを超えるように簡単に改造できないようにしている。ここでも、クローズドCANプロトコルを使用することが有効で、ユーザーはケーブルを接続するだけでバイクの制限を解除することはできない。現在、多くのe-bike会社がUL認証バッテリーやシステムを宣伝し、顧客に安全性を保証していることは注目に値する。例えば、HOVSCOは(同社のナレッジベースにあるように)、自社のバイクが電気的安全性でUL 2849に、総合的安全性でEN 15194に適合していることを強調している。これは、配線、コネクター、通信のすべてが危険を引き起こすことなく機能しなければならないことを意味する。
国際基準とその他の基準: EN 15194やUL 2849以外にも、関連する規格があります、 ISO 4210 (自転車安全基準)にe-bikeの要件をカバーする部分が追加された。 DIN 79010 カーゴバイクの規格は、カーゴ積載時のフレーム強度やブレーキ性能などをカバーしている。これらは直接エレクトロニクスを規定するものではないが、カーゴバイクの規格は、例えばアシストが高負荷下で誤作動しないことを暗黙のうちに要求するかもしれない。堅牢な通信は、バイクに負担がかかっても(電気ノイズが増えたり、バッテリーがヘタったりしても)、バッテリー、コントローラー、センサー間の信号が信頼性を保つことを保証する。
要約すると コンプライアンスと安全性により、UARTとCANのどちらを選択するか設計上の決断を迫られる場合がある。.最大限の安全性を目指すメーカーは、エラーチェックと制御のためにCANに傾倒するかもしれませんし、UARTシステムに特別なセーフガードを実装するかもしれません。どちらのプロトコルも安全設計の一部となり得ますが、どのように使用するかが鍵となります。その CANシステムのクローズドな性質は、コンプライアンスを強制できる (例えば、法律で義務付けられている速度制限がユーザーによって調整できない)。 UARTシステムはユーザーの自由度を高めるが、それは諸刃の剣である。.メーカーは、UARTベースのバイクであっても、簡単にハッキングできないような物理的またはソフトウェア的なリミッターを備えていることを保証しなければならない。
最後に、プロトコルに関係なく 高品質のコネクターと配線 はコンプライアンスの一部である。EUでは、配線が緩むことなく振動に耐え、濡れた状態でもショートしないことが要求される。Higo/Juletのようなコネクター(e-bikeで広く使用されている防水コネクター)は、利便性だけでなく、以下を満たすという点でも人気がある。 IP定格と信頼性要件.CANバスは通常、このようなコネクタを使用する(例えば、1つのHigo 4ピンまたは5ピンが、ディスプレイ用のCANデータと電源を運ぶかもしれない)。プロトコルを選択しても、優れたコネクタの必要性は変わりません。 ストレインリリーフ、絶縁、ロッキングコネクター ケーブルが緩んでブレーキ遮断信号がコントローラに届かなくなった場合などは危険です)。
このセクションの締めくくりとして、現在、ヨーロッパとアメリカの両方がe-bikeの安全性に強く注目しています。EN 15194やUL 2849といった規格への準拠は、評判の高いブランドにとってますます譲れないものとなっている。通信プロトコルはパズルの1ピースであり、電気システムの調整とフェイルセーフを保証する手段である。CANバスの信頼性は、堅牢な通信を提供することでこれらの規格を満たすのに役立ちますが、UARTシステムも同様に安全であるためには慎重な設計が必要です。メーカーは多くの場合、コンプライアンス戦略に最も適したプロトコルを選択します:リスクを管理しやすいシンプルな設計にはUARTを、安全機能が光る複雑なシステムにはCANを使用します。
コストと市場に関する考察 通信プロトコルを選択する場合
通信プロトコルを決めるとき(あるいは一般的にe-bikeの電気システムを設計するとき)、コストは重要な要素です。ここでは、コストの比較と、B2Bのバイヤーやエンジニアが考慮する点について説明する:
- ハードウェア・コスト: 先に述べたように、UARTベースのシステムは通常、よりシンプルなハードウェアを使用します。コントローラとディスプレイには、事実上すべてのマイクロコントローラが内蔵しているUART機能が必要なだけです。配線も少し単純になるかもしれません(終端処理の考慮が少ないなど)。CANベースのシステムには、各デバイスにCANトランシーバー・チップと、おそらくより強力なMCU(最近ではかなり安価なMCUでもCANを内蔵しているが)が必要だ。実際のBOM(部品表)の差は、大量生産ではバイク1台あたり数ドルのオーダーかもしれないが、競争市場ではそれでも重要だ。しかし、競争の激しい市場では、それでも重要なことなのだ。とはいえ CANハードウェアのコストが下がった そのトレードオフは、CANが提供する追加機能によって容易に正当化できるかもしれない。
- 開発および統合コスト: e-bikeの新興企業や小規模企業にとって、社内に専門知識がない場合、CANベースのシステムをゼロから開発するのはコストがかかる可能性がある。CANに精通した組み込みシステムエンジニアを雇い、ツールに投資し、カスタムファームウェアの開発に時間を費やすことになるかもしれない。あるいは、既製のシステム(CANベースのボッシュやシマノのドライブユニットなど)を購入すれば、開発コストは低くなるが、単価は高くなる(ボッシュのシステムはプレミアム価格だが、これは完全に統合されたソリューションとブランド名が得られるためでもある)。A UARTシステムは、多くの場合、市販の部品を使って組み立てることができる。 例えば、多くの企業がオープンソースや標準プロトコルを使用しており、エンジニアリングの多くが既に完了しているため、リスクが低い。B2Bのバイヤー(例えば、自社ブランドでe-bikeを大量に供給したい企業)にとって、UARTを採用することは、より安価な汎用部品を調達できることを意味するかもしれない。一方、CANを採用することは、多くの場合、特定のサプライヤーのエコシステム(ライセンス料や高価格を請求するかもしれない)に合わせることを意味する。
- アフターセールスおよびメンテナンス費用: これは時に見落とされる。フリート・オペレーター(自転車シェアリングや宅配会社など)は、次のようなことに気づくかもしれない。 CANバスバイクがメンテナンス費用を節約.なぜか?リモートで、あるいはより迅速に問題を診断できるからだ。CAN接続されたシステムは、エラーコードを詳細に報告することができます(例えば、特定のコードとして「バッテリー#2温度センサーの不具合」など)。技術者は、診断ツールをCANバスに接続して、問題を特定することができます。これにより、作業時間を短縮できる。また、IoTベンチャーのケースに見られるように、ファームウェアのリモートアップデートなども可能で、特定の修正のためにバイクを物理的にリコールするコストを削減できる。一方、UARTバイクの初期メンテナンスはよりシンプルになるかもしれない(おそらく、通信でうまくいかないことが少ない)。個人消費者にとっては、UARTバイクは市販のパーツやコミュニティの知識で修理できるため、修理費が安く済むかもしれない。つまり、次のようなコスト・トレードオフがある。 ユーザー・サービス性 (UARTの勝利)と 高度診断サポート (CANの勝利により、プロサービスのコストが下がる可能性がある)。
- ライセンスと専有コスト: 独自のCANプロトコルを使用する場合、ライセンス料や制約が発生する可能性があります。自転車ブランドが独自のCANプロトコルを開発する場合は問題ありませんが、CANopenやEnergyBusのようなものを使用する場合は、標準規格に準拠し、場合によっては協会(EnergyBus e.V.など)に加入する必要があるかもしれません。これらのコストは一般的に小さいが、注目に値する。ボッシュのような独自システムは、自転車のOEMがドライブユニットをパッケージとして購入することを意味し、ボッシュが価格を設定します。UARTシステムの場合、部品サプライヤー間の競争が激しく、価格が下がる可能性がある。
- 顧客の認識と価値: マーケティングの観点からは、「自動車グレードのCANバス・エレクトロニクス」を搭載したバイクは、先進的で信頼性が高いように聞こえるため、ブランドは高い価格を正当化するかもしれない(たとえ顧客がその違いを直接感じなくても)。には価値がある。 プレミアムな感触とパフォーマンス CANシステムは、多くの場合、高品質のモーターなどを搭載したバイクに搭載されている)。そのため、ハイエンド市場や商業顧客をターゲットとするブランドは、プレミアム製品の一部としてCANを活用することができる。逆に、エントリーレベルのe-bikeの場合、顧客はそれが機能し、手頃な価格であることを重視する。だから プロトコルの選択は、バイクの市場セグメントに合わせるべきである。.
- 将来への備え: エンジニアが考えるコストとは 将来性がないことの機会費用.現在、UARTベースのプラットフォームに投資しているが、来年、より多くの機能(例えば、2つ目のバッテリーや新しいセンサータイプ)を追加したい場合、古いプラットフォームでは限界があり、再設計を余儀なくされる可能性があります。企業によっては、新機能やアクセサリーのために余裕を残しておくために、たとえフルに活用されなくても、最初からCANを採用する方が長期的に費用対効果が高いと判断する場合もあります。これにより、将来的な再開発コストを削減することができる。これは戦略的な決断です。少し多めに前払いをするのと、後でアップグレードするのとでは、どちらが高くつく可能性があるかということです。
実際の価格については、特定するのは難しいが、例えば、基本的なUART e-bikeコントローラー+ディスプレイのセットで、バルクで$50~$100であるのに対し、大手ブランドの同等のCANベースのセットは(より洗練されているため)数百ドルである、と業界関係者は言うかもしれない。しかし、その差には、通信の差だけでなく、モーター性能の向上や保証なども含まれることが多い。その 純粋にプロトコルのための増分コスト (CANチップの追加など)は小さいが 生態系コスト (高価なシステムと安価なジェネリック・システムを比較すると)大規模になる可能性がある。
B2Bのe-bikeバイヤーのためにわかりやすく言うと、こうだ:
- を優先する場合 最低単価 複数のサプライヤーから調達する柔軟性をお望みなら UARTベースのオープンシステム は魅力的だ。それに見合うディスプレイやコントローラーを探し回ることもできるし、複数の工場と交渉することもできる。
- を優先する場合 性能、信頼性、ターンキーシステム (そして、あなたはそのためにお金を払う意思がある)。 信頼できるサプライヤーによるCANベースのシステム その分コストが高くなるが、バイクの価格を高く設定したり、販売台数を効率化することで回収できるだろう)。
限界と今後の動向
UARTとCANの素晴らしさを称賛するとしても、次の点は注目に値する。 Eバイク通信の現状の限界 そして物事がどこへ向かっているのか:
- 業界全体の標準化の欠如: ほとんどすべての自動車がCANバスと標準化された診断(OBD-II)を使用している自動車業界とは異なり、e-bike業界はまだ断片的である。業界には 単一の普遍的プロトコルなし すべてのe-bikeが使用している。UARTの実装は様々であり(各メーカーがUART上で異なるデータフォーマットを持つ可能性がある)、CANの実装は多くの場合独自である。これは、消費者や自転車組み立て業者にとっての制限であり、異なるブランド間で「プラグ・アンド・プレイ」することはできない。異なるブランド間で "プラグアンドプレイ "することはできません。同じプロトコルとファームウェアを明示的に使用しない限り、任意のディスプレイを任意のコントローラーで動作させることはできません。 エナジーバス CANopen CiA-454は、e-bikeコンポーネントのメッセージを定義している)標準化への有望な取り組みであるが、まだ普及していない。例えば、メーカーXのバッテリーをメーカーYのモーターシステムで使用することができ、CANopenベースのプロトコルが互いの理解を保証する。これは、B2Bバイヤー(サプライヤーの選択肢が増える)や消費者(アップグレードや修理の選択肢が増える)に利益をもたらすだろう。しかし、業界のプレーヤーには、独自のシステムを維持したい(顧客を囲い込みたい)というビジネス上の動機もある。との間の緊張関係 標準化 vs 独自のコントロール は、e-bikeプロトコルの未来を形作るだろう。
- 帯域幅とデータニーズ: 現在のところ、e-bikeの通信は比較的低データだ。しかし、将来のe-bikeは、より多くの情報をストリーミングするかもしれない。高周波のトルクセンサー・データや、トレーニング目的の高解像度パワー測定基準、あるいは安全のためのカメラからのビデオ収集などを想像してみてほしい。大量のデータを送信する場合、古典的な速度のCANはボトルネックになるかもしれない。自動車業界には、CAN-FD(より大きなデータフレームと高いスループットを備えたCANの拡張バージョン)や、高帯域幅のニーズに対応するイーサネットなどのプロトコルがある。e-bikeの場合、必要に応じてCAN-FDや、データログをオフロードするためのBLE/Wi-Fiが登場する可能性がある。 ワイヤレス通信 すでに多くのE-BIKEがBluetooth Low Energyを使ってスマートフォンのアプリに接続している。これは内部電気システムの範囲外だが、パラレルチャンネルとして注目に値する。おそらく将来的には、よりシンプルなe-bikeの中には、有線ディスプレイをやめてスマホとのワイヤレス・モジュールを使うものも出てくるかもしれない。貨物フリートでは、V2X(Vehicle-to-Everything)通信の統合が進むかもしれない。つまり、e-bikeが物流システムや交通インフラと通信するようになるのだが、この場合もコアとなるCANバスシステムの上に重ねることになるだろう。
- セキュリティ上の懸念: e-bikeが接続され、より複雑な通信を使用するようになるにつれて、 サイバーセキュリティ が懸念されます。外部接続のないUARTシステムは、実質的にハッキングとは無縁です(誰かがワイヤーを物理的に盗聴する必要があります)。しかし、BluetoothモジュールやGSMモジュール(車両追跡用)とインターフェースするCANバスは、潜在的な脆弱性をもたらします。メーカーは、悪意のある制御を防ぐために、プロトコル(特にバスへのワイヤレス・インターフェース)の安全性を確保する必要がある(IoTハッキングにより、遠隔操作で配達用バイクのフリートを使用不能にすることを想像してほしい。)プロプライエタリなプロトコルは本質的に、不明瞭さによってある程度安全だが、CANがE-BIKEで一般的に知られるようになると、悪質な行為者は露出したポートを介してCANメッセージを注入しようとする可能性がある。そのため、将来的にはE-BIKE通信の暗号化や認証が進むかもしれない。
- ユーザー・エクスペリエンス: 最終的には、どのプロトコルを使うにしても、良いユーザー体験を提供するものでなければならない。ライダーが気にするのは、スムーズな電力供給、ディスプレイ上の正確な情報、必要なときに作動する安全機能などだ。初期のCANベースのシステムには、以下のような限界がありました。 も ユーザーは、簡単な設定を変更することさえできないことに不満を感じていた。システムが成熟するにつれて、メーカーはコントロール性を損なうことなく、(認証されたアプリや設定によって)ユーザーに柔軟性を与える方法を見つけるかもしれない。例えば、アプリによってCANシステム上でも(安全な範囲内で)限定的なチューニングが可能になったり、認証されたサードパーティ製アクセサリーがバス上で通信できるようになるかもしれない(おそらくEnergyBus標準メッセージを使用)。皮肉なことに、CANの世界であっても、プロトコルが標準化されるにつれて、もう少しオープンになっていくことが予想される。
最後に e-bikeの電気通信システムは、UARTであれCANであれ、e-bikeの性能、安全性、モジュール性にとって極めて重要である。.e-bikeを設計するエンジニアは、UARTのシンプルさとCANの高度さのバランスを取らなければならない。B2Bのバイヤーは、この選択がコスト、サプライチェーン、製品の価値提案にどのように影響するかを考慮しなければならない。e-bikeがよりコネクテッドで高性能なマシンに進化するにつれて、業界はCANバスに傾きつつあるように見えるが、UARTベースのシステムは、よりシンプルで低価格なモデル向けにしばらく並列で残る可能性が高い(結局のところ、ライダーの巨大なセグメントにとっては「十分」なのだ)。
これらの通信プロトコルを理解することによって、本質的に 電気言語 e-bikeの内部的な仕組みについて、より深く理解することができる。スロットルをひねったり、ペダルを踏んだり、モーターを回転させたり、ディスプレイに表示される数字に至るまで、すべてがワイヤーを伝わるビットとバイトによって実現されている。 バッテリー、モーター、ライダーが同期している.そして、それが洗練された街乗りe-bikeであろうと、頑丈な貨物運搬車であろうと、その調和こそがライドを楽で安全なものにする。最終的には、どのようなプロトコルであれ、ライダーが単に旅を楽しめるように、テクノロジーを背景に溶け込ませることが目標である。
情報源
- Qiolorバイクガイド "Eバイクコントローラーの互換ディスプレイの選び方" (2025) - UART言語とCANBUS言語の比較や、プロトコルを一致させることの重要性について議論している。
- ヴェルコテック "CANとUART:通信モードの違い" (2024) - UARTのシンプルさとCANのネットワーク機能について説明し、それぞれの長所/短所を挙げる。
- Biktrixヘルプセンター "CANBUSとUARTプロトコルとは何ですか?" - CANがどのように設定をロックするのか(速度制限は固定)、UARTはどのように変更できるのか、さらにディスプレイの互換性を比較する。
- IoTベンチャー(CYCLEフリートとのケーススタディ) - e-bikeフリートにおけるCAN統合の利点について説明:メンテナンスデータへのアクセス、遠隔モーター無効化、OTAアップデート。
- HOVSCOナレッジ "電動自転車にはどんな安全機能があるのか?" - EN 15194 (EU)は速度/出力制限と耐久性を保証し、UL 2849 (US)は電気/火災の安全性に焦点を当て、カーゴバイクの安全性についてはDIN 79010に言及している。
- テキサス・インスツルメンツ "BLDCモータを用いた電動自転車のハードウェア設計に関する考察" - 典型的なe-bikeシステムのブロック図と、制御エレクトロニクスに関する洞察を提供した。
- レトリゴ・エビバイク・ナレッジ 「E-bikeディスプレイ配線の説明 - 配線、コネクター(Higo/Julet)についての詳細と、普遍的な配線標準が存在しないことを注意し、接続の適切なマッチングとシグナルインテグリティのための堅牢な配線を強調している。
- EnergyBus規格 - Kvaserによる紹介 - EnergyBusについて、CANopenをベースとしたLEVコンポーネントのオープンな規格であり、メーカー間の互換性と安全性を確保するものであると説明しています。