
Elektrilised jalgrattad (e-jalgrattad), sealhulgas kaubikuga e-jalgrattad, tuginevad keerulisele elektrisüsteemile, mis ühendab aku, mootori, kontrolleri, andurid ja kasutajaliidese. Selle süsteemi sideprotokollid on "keel", mis võimaldab kõigil neil komponentidel sujuvalt kooskõlastada. Selles populaarteaduslikus ülevaates selgitame, millised on need sideprotokollid ja kuidas need toimivad e-jalgratta elektrisüsteemides. Käsitleme kasutatavate protokollide tüüpe, nende erinevusi, nende kasutuskohti, nende eeliseid ja puudusi, kulude kaalutlusi, vastavust ELi ja USA ohutusstandarditele ning piiranguid. Eesmärgiks on pakkuda meie kliendile ja publikule selget, autoriteetset juhendit, mis tasakaalustab tehnilise sügavuse ja praktilise arusaamise.
E-jalgratta põhikomponendid - "närvisüsteem"
E-rattaid võib käsitleda nii, et neil on juhtmete ja andmesideühenduste keskne närvisüsteem, mis ühendab kõik kriitilised komponendid. Nii nagu närvid kannavad kehas signaale, kannab juhtmestik nii toite- kui ka andmesignaale üle kogu jalgratta . Tüüpilise e-jalgratta elektrisüsteemi põhikomponendid on järgmised:

- Akupakett: Alalisvooluallikas (tavaliselt 36-48 V), mis varustab süsteemi energiaga. See ühendatakse kontrolleriga paksu toitejuhtme kaudu (mille ohutuse tagamiseks on kaitsmed või kaitselülitid), et anda põhivoolu. Mõnel täiustatud akul on ka andmesideühendus (sidejuhtmete kaudu), et jagada oleku- või juhtimissignaale kontrolleriga.
- Mootor ja kontroller: Mootor (rattas olev rummimootor või väntvõllil olev keskajam) saab energiat mootorikontrollerilt, mis on "aju", mis reguleerib mootori väljundit sõitja sisendite ja andurite tagasiside alusel. Kontroller on mikroprotsessoriga elektrooniline seade, mis võtab vastu signaale (gaasipedaal, pedaaliandur, pidurid jne) ja juhib mootorile antavat energiat. Mootoritel on tavaliselt faasijuhid (rasked toitekaablid) ja andurijuhid (õhukesed Hall-efektiandurite juhtmed, mis annavad tagasisidet rootori asendi kohta), mis lähevad kontrollerisse.
- Inimese kasutajaliides (gaasipedaal, pedaaliandur, ekraan): Sõitja suhtleb e-jalgrattaga selliste seadmete kaudu nagu gaasipedaal (sageli juhtraua käepide, millel on Halli efekti andur, mis väljastab muutuva pinge signaali, et nõuda kiirust) ja pedaalide abisignaal (PAS), mis tuvastab pedaalide liikumise magnetite ja andurite abil. Juhtraual olev näidik näitab kiirust, aku taset, abitasemet jne ning sisaldab sageli nuppe, mille abil saab rattur seadistusi kohandada. Ekraan ja kontroller vahetavad andmeid mitmejuhtmelise kaabli kaudu, mis sisaldab ka toite- ja sideliine .
- Ohutuslülitid (pidurikäepidemed): E-jalgratta pidurihoovad on tavaliselt varustatud katkestuslülititega, mis saadavad signaali kontrollerile mootori võimsuse koheseks katkestamiseks pidurdamisel. Tavaliselt kasutatakse selleks lihtsat kahejuhtmelist vooluahelat, mis toimib kontrollerile sisse/välja signaalina.
- Valgustus ja tarvikud: Paljud e-rattad on varustatud ka esi- ja tagatuledega, sarvega, USB-laadijatega jne. Neid võib juhtida põhikontroller või need võivad töötada eraldi vooluahelates, kuid tipptasemel süsteemides saab neid adresseerida ka kommunikatsioonibussi kaudu.
Üksikasjalik juhend e-jalgrataste ja kaubaratta lisaseadmete kohta on saadaval aadressil loe seda artiklit põhjalikuma vastuse saamiseks , või võib-olla vaadata meie Cargo Bike 101 lehekülg.
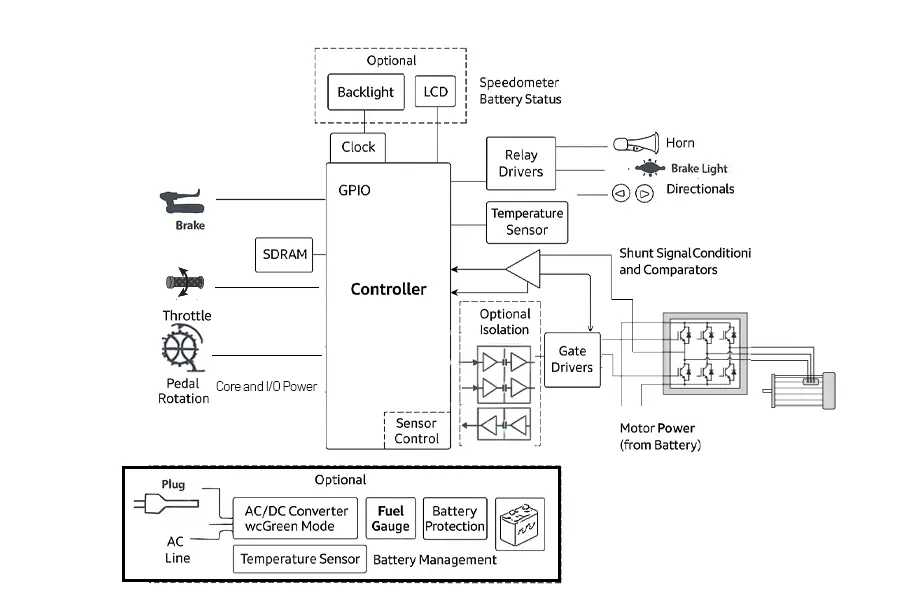
Joonis 2: tüüpilise elektrijalgratta juhtimis- ja akujuhtimissüsteemi plokkskeem. Keskne kontroller ühendub peamiste sisenditega - gaasipedaal, pedaalide andurid, pidurihoovad - ja haldab väljundeid, näiteks mootori ajamite signaale, väravate, releede ja GPIO-ühenduste kaudu. Valikulised moodulid, nagu LCD-ekraanid, akulaadijad, kütusenäidikud ja taustvalgustus, laiendavad süsteemi funktsionaalsust. Komponentidevaheline side toetab mootori toite, valgustuse, turvakatkestuste ja aku oleku jälgimise koordineerimist reaalajas.
Millised on e-jalgratta sideprotokollid?
Elektrooniliste jalgrataste kontekstis viitavad sideprotokollid meetodile ja vormingule, mille abil elektroonilised komponendid andmeid vahetavad. Varajastel või algsetel e-jalgratastel ei olnud sageli keerukat digitaalvõrku - paljud signaalid olid analoogsed või lihtsad sisse-välja lülitused. Näiteks gaasipedaal saadab analoogpinge, et näidata, kui palju võimsust sõitja soovib, ja pidurilüliti lihtsalt avab või sulgeb voolu katkestamiseks vooluahela . Kuna aga e-jalgrattad on muutunud keerukamaks - nutikad ekraanid, täiustatud andurid ja isegi GPS või nutitelefoni integreerimine -, tekkis vajadus tugevama digitaalse kommunikatsiooni järele.
Tänapäeval domineerivad e-jalgrattasüsteemides kaks peamist digitaalset kommunikatsiooniprotokolli:
- UART (universaalne asünkroonne vastuvõtja-saatja): Järjekordse side meetod, mis loob otsese üks-ühele andmeühenduse kahe seadme (tavaliselt kontrolleri ja ekraani) vahel.
- CAN-väli (kontrollerivõrk): Võrguprotokoll, mis võimaldab mitmel seadmel (kontroller, ekraan, aku BMS, andurid jne) suhelda sama ühise bussiliini kaudu.
Lisaks UART- ja CAN-bussile kasutatakse e-jalgrattasüsteemides aeg-ajalt veel kahte muud sideprotokolli:
- SIF (Serial Interface Format): See on patenteeritud või lihtsustatud protokoll, mida tavaliselt leidub teatud kaubamärgiga süsteemides (nt Shimano STEPS või vanemates näidikutes). Seda kasutatakse tavaliselt põhiliseks andmevahetuseks kontrolleri ja ekraani või kaugjuhtimisnuppude vahel. Kuna SIFil puudub avatud standardimine ja paindlikkus, on see enamasti piiratud konkreetsete kaubamärkide või vanade mudelitega.
- RS-485 (soovitatav standard 485): RS-485 on tööstuslik jadakommunikatsiooniprotokoll, mis on tuntud oma pika vahemaa usaldusväärsuse ja mürakindluse poolest. Kuigi see ei ole tarbijale mõeldud e-jalgrattades nii levinud kui UART või CAN, on see siiski kasutusel mõned kõrgekvaliteedilised või kaubandusliku laevastiku süsteemideriti seal, kus on vaja töökindlust ja pikendatud juhtmestikku - näiteks ühiselt kasutatavad jalgrattad, rendipargid või raskeveokite e-jalgrattad.
Need protokollid on sisuliselt e-jalgratta elektroonika "keeled". Kui kõik komponendid räägivad sama keelt, siis liigub teave korrektselt; kui mitte, siis ei mõista seadmed üksteist. Seepärast on näiteks ekraani ja kontrolleri ühendamisel protokollide ühildamine kriitilise tähtsusega. Isegi kui pistik sobib, tähendab protokolli ühildamatus, et osad ei tööta koos .
Turu kasutuse ülevaade (2024-2025 hinnangulised suundumused)
Kuigi ei ole olemas üldiselt avaldatud protokollide kasutamise jaotust e-jalgrattaturul, on tööstuse ja peamiste süsteemimüüjate (nt Bosch, Bafang, Shimano, Mahle jne) põhjal järgmised mõistlik hinnanguline jaotus alates 2025. aastast:
| Protokoll | Kasutamise osakaal (hinnanguline) | Üldised rakendused | Märkused |
|---|---|---|---|
| UART | ~50-60% | Sissepääsutasandi kuni keskmise kategooria e-jalgrattad | Kasutatakse laialdaselt tänu lihtsusele ja madalale maksumusele. |
| CAN-buss | ~30-35% | Kõrgklassi, nutikad või modulaarsed e-jalgrattad | Aruka integratsiooniga suurenev vastuvõtmine |
| RS-485 | ~5-10% | laevastiku süsteemid, pikajuhe kaubanduslikud seadeldised | Piiratud konkreetsete kasutusjuhtumitega |
| SIF / Proprietary | <5% | Tootemargispetsiifilised või vanad süsteemid | Enamasti leidub vanemates või lukustatud ökosüsteemides. |
Märkus: Need arvud on üldistatud ülemaailmsete turgude (EL, CN, NA) kohta ja põhinevad OEM-trendidel, avalikel dokumentidel, lõhkumisandmetel ja komponentide tarnijate andmetel.
Määratleda e-jalgratta sideprotokollid lihtsamalt :
Lihtsustatult öeldes on e-jalgratta sideprotokollid nagu keeled või reeglid, mis võimaldavad erinevatel elektroonilistel osadel üksteisega suhelda. Kui komponendid ei räägi sama keelt, ei saa nad üksteisest aru - isegi kui pistik füüsiliselt sobib.
📞 Analoogia: Üks-ühele-kõne vs. grupivestlus
Kujutame ette kahte igapäevast suhtlusviisi, et mõista e-ratta protokolle:
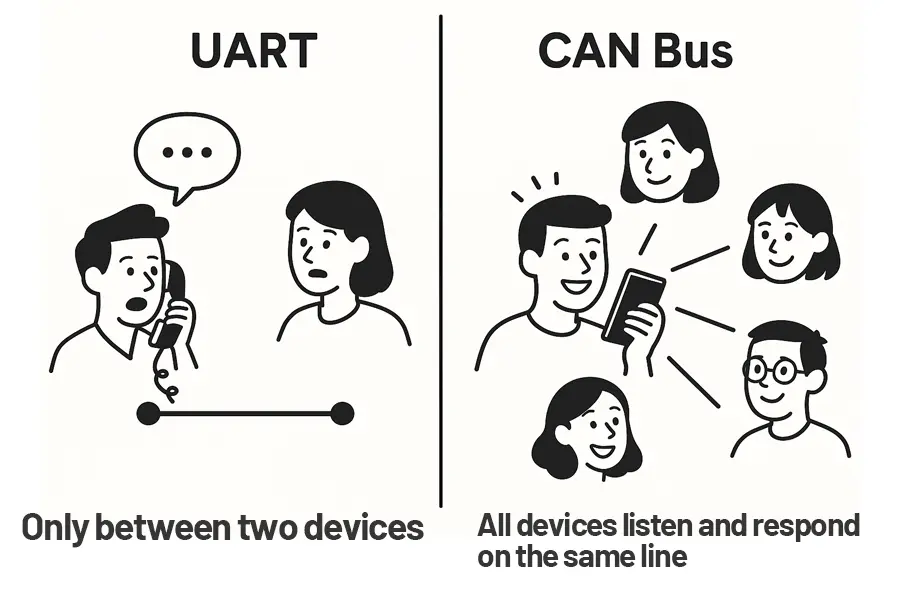
UART: nagu üks-ühele telefonikõne
- UART (Universal Asynchronous Receiver-Transmitter) on nagu ühe sõbra helistamine telefoni teel.
- Ainult kaks seadet saavad korraga rääkida - nagu teie ekraan ja kontroller.
- Kui soovite rääkida teise seadmega, on vaja teine traat (või teine telefonikõne).
- See on lihtne, kuid ei ole skaleeritav, kui teil on palju seadmeid.
- Üldine põhilised e-ratta süsteemid piiratud funktsioonidega.
AN Bus: nagu grupivestlus
- CAN Bus (Controller Area Network) on nagu grupivestlus WhatsAppis või WeChatis.
- Kõik seadmed (kontroller, aku, ekraan, andur, tuled) on samas jututuppa.
- Iga sõnum on märgistatud saatja ID-ga ja iga seade loeb ainult talle mõeldud sõnumeid.
- See on palju tõhusamalt ja ideaalne, kui on palju komponente, mis peavad koos töötama.
- Kasutatakse arukad ja täiustatud e-ratta süsteemid, sageli koos GPSi, Bluetoothi ja rakenduste integreerimisega.
| Funktsioon | UART (telefonikõne) | CAN-buss (grupivestlus) |
|---|---|---|
| Ühenduse tüüp | Üks-ühele (punkt-ühele) | Üks-mitmele (jagatud buss) |
| Skaleeritavus | Madal - vajab lisajuhtmeid rohkemate seadmete jaoks | Kõrge - mitu seadet kasutavad samu juhtmeid |
| Kommunikatsioonivoog | Ainult kahe seadme vahel | Kõik seadmed kuulavad ja vastavad samal liinil |
| Keerukus | Lihtne | Keerulisem, kuid võimsam |
| Kasutusjuhtum | Põhilised e-jalgrattad (ainult ekraan ↔ kontroller) | Nutikad e-jalgrattad koos BMS-i, rakenduse, anduritega jne. |
Sideprotokollide roll
Elektrooniliste jalgrataste sideprotokollid teenivad mitmeid olulisi eesmärke:
- Andmete jagamine: Need võimaldavad kontrolleril saata reaalajas andmeid ekraanile (kiirus, aku laetuse tase, veakoodid) ja saada tagasi käsklusi (nt muuta abitaset, tuled sisse/välja). Ilma nõuetekohase protokollita ei pruugi saada usaldusväärset kiiruse näitu või ei pruugi olla võimalik seadete kohandamine.
- Komponentide koordineerimine: Täiustatud süsteemides peavad mitu mikrokontrollerit kooskõlastama oma tegevust. Näiteks võib nutikas aku, millel on oma akuhaldussüsteem (BMS), suhelda mootorikontrolleriga, et vältida ülevoolu või kuvada täpne aku protsent. CAN-buss või sarnane võrk võimaldab aku, mootorikontroller, ekraan ja isegi andurid jagada teavet mitme sõlme võrgustikus.
- Ohutus ja usaldusväärsus: Hästi kavandatud protokoll tagab, et rikke või signaali kadumise korral (näiteks kui kaabel on kahjustatud) suudab süsteem selle tuvastada ja võtta kasutusele ohutuid meetmeid (näiteks mootori toite katkestamine). Sellised töökindlad protokollid nagu CAN sisaldavad veakontrolli ja sõnumite prioriseerimist, et sellega toime tulla. Lihtsamatel analoogsignaalidel puudub selline veakäitlus - kui gaasijuhtme juhe lahti läheb, võib kontroller tõlgendada müra valesti gaasimissignaalina, kui ei ole olemas ohutusabinõusid.
- Laiendatavus: Seadmete lisamine või eemaldamine on lihtsam kommunikatsioonivõrgu abil, kui tegemist on rikkalike e-jalgratastega (GPS-jälgimisseadmed, vargusevastased immobilisaatorid, mitu abistava andurit jne). Selle asemel, et iga uus seade vajaks spetsiaalset juhtmeühendust kontrolleriga, võib seade liituda ühise bussiga ja jagada andmeid kõigi teistega. Selline skaleeritavus on peamine põhjus, miks kaasaegsed tipptasemel e-jalgrattad liiguvad CAN-bussi suunas.
Kokkuvõttes on kommunikatsiooniprotokoll e-ratta elektrisüsteemi selgroog, mis tagab kõigi elektrooniliste osade kooskõlastatud töö. Järgmises postituses käsitleme kahte peamist protokolli tüüpi (UART ja CAN), uurides, kuidas kumbki töötab ja millised on nende vastavad kasutusjuhud e-jalgrattas ja millised on nende kasutusalad. kaubaveo e-jalgrattad. kontrollige, kui olete huvitatud:
- "UART-i mõistmine e-ratastega: Kuidas lihtne jadakommunikatsioon toidab teie sõitu"
- Algajaile mõeldud juhend selle kohta, kuidas UART võimaldab põhilist andmevahetust e-jalgratta komponentide, näiteks ekraanide ja kontrollerite vahel.
- "Mis on CAN-buss e-jalgrattas? Targem viis akude, andurite ja muu ühendamiseks"
- Saate teada, kuidas kaasaegsed e-jalgrattad kasutavad CAN-bussi, et toetada mitme seadme vahelist suhtlust, täiustatud näidikuid ja süsteemi diagnostikat.
Rakendusstsenaariumid: Milline sideprotokoll millise e-ratta jaoks?
On kasulik mõista, kuidas UART ja CAN on praktikas valitud erinevate e-jalgrattakujunduste puhul. Vaatleme kahte suurt kategooriat: tarbijate e-jalgrattad (sealhulgas tavalised töö- või vabaajarattad) ja kaubaveo/laevastiku e-jalgrattad (kasutatakse sageli äritarnete või rendiparkide poolt)., märkides, et neil on sageli erinevad prioriteedid.

- Standardsed tarbe-e-rattad (linnarattad, mägirattad, maantee-e-rattad): Need on jalgrattad, mida paljud inimesed ostavad isiklikuks kasutamiseks. Nende valik ulatub algtasemest kuni väga kõrgekvaliteediliste ratasteni. Madalama hinnaklassi mudelites on UART-kommunikatsioon väga levinud. Näiteks lihtne 36 V elektriline jalgratas, millel on tratsimispedaalide andur ja lihtne LED-ekraan, kasutab tõenäoliselt UARTi (või isegi analoogsignaalide) vahelist ühendust kontrolleri ja minimaalse ekraani vahel. Siinkohal keskendutakse järgmisele kulutasuvus ja põhifunktsionaalsus. Paljud sellised jalgrattad kasutavad laialdaselt kättesaadavaid kontrollereid ja kuvareid, mis järgivad de facto UART-protokolli, mis tähendab, et jalgrattamargid võivad hankida komponente erinevatelt algseadmete tootjatelt. See on atraktiivne B2B ostjatele, kes soovivad paindlikkust, et kasutada näiteks tootja A ilusamat ekraani koos tootja B kontrolleriga - kui mõlemad räägivad UARTi samas formaadis, võib see toimida (kuigi tuleb kontrollida ühilduvust pinoutide ja püsivara osas). Kõrgema klassi tarberatastel, eriti suurte kaubamärkide valmistatud ratastel, on suundumus CAN-bussi poole. Suure jõudlusega e-MTB-d või e-maasturirattad, millel on pöördemomendiandurid ja uhked ekraanid, võivad kasutada CANi, et kõik sujuvalt integreerida. Mõned kaubamärgid kasutavad siiski ka tipptasemel jalgratastel endiselt UARTi või muid patenteeritud jadaliideseid; see sõltub tootjast ja tema disainifilosoofiast.

- Kaubaveo e-rattad ja kaubanduslik laevastik: Kaubaveo e-rattad on mõeldud raskete koormate või reisijate vedamiseks ja neid kasutavad sageli ettevõtted (kullerteenused, postirattad jne). Need jalgrattad kipuvad eelistama töökindlus, ohutus ja laevastiku haldamise võimalused üle elektroonika maksumuse. Just selles segmendis on CAN-buss tõesti edu saavutanud. Näiteks kaubarattad võivad olla kahekordsed akud suurendada ulatust - kahe aku haldamine nõuab teabevahetust, et tasakaalustada tühjendamist või vähemalt teatada mõlema aku olekust. CAN lihtsustab ühe kontrolleri suhtlemist kahe BMS-üksusega (üks kummaski akus) samal bussil. Kaubarattal võivad olla ka lisatarvikud: pidurituled, suunatuled, isegi elektroonilised lukud - nende koordineerimine keskse bussi kaudu lihtsustab juhtmestikku ja juhtimist. Kuna kaubaveo e-rattad töötavad sageli laevastikena, meeldib ettevõtetele, et neil on olemas telemaatika neile: GPS-seireseadmed, mis võivad teatada jalgratta asukohast, kasutamisest ja võimalikest vigadest. CAN-ühendusega süsteemi puhul võib telemaatikamoodul lihtsalt pealt kuulata CAN-sõnumeid kiiruse, aku seisundi jne kohta ja selle teabe üles laadida. Üks juhtumiuuring, mis tehti Euroopa kaubaveopargiga, näitas, et CAN-bussi kasutamine võimaldas hooldusandmete (nt läbisõit) kaugseiret, mootori kauglülitamist varguse vastu ja jalgratta püsivara uuendamist üle õhu - need funktsioonid on sõidukipargi haldamisel äärmiselt kasulikud. UART-põhise jalgratta puhul oleks seda keeruline rakendada.
- Mix-and-Match vs. integreeritud süsteemid: Kui e-jalgratta kaubamärk soovib vabadust komponentide segamiseks või järelturu uuenduste võimaldamiseks, kipuvad nad jääma UART-põhiste süsteemide juurde. Me nägime, et UART-süsteemid võimaldavad hõlpsasti vahetada näidikuid või muuta mootori seadeid.. Väiksem e-jalgratta ettevõte võib eelistada seda teed, et vältida ühe tarnija külge lukustamist - nad võivad vahetada mootori/kontrollerite tarnijat ilma kogu ökosüsteemi muutmata, kui protokoll jääb UART-ks ja nad saavad püsivara kohandada. Teisest küljest, süsteemi optimeerimisele ja nõuetele vastavusele keskendunud kaubamärgid valivad sageli CAN. Näiteks Boschi juhitud e-jalgrattad kasutavad CAN-taolist bussit (Boschil on oma CAN-põhine protokoll), mis ühendab nende mootori, ekraani ja aku. See tagab, et ükski kolmanda osapoole osa ei saa segada; kõik on peenelt kokku häälestatud. Selle plussiks on suurepärane töökindlus ja turvalisus - süsteem annab veateate, kui midagi ei vasta spetsifikatsioonile. Miinuseks on see, et B2B ostjana (nagu jalgratta algseadmete valmistaja, kes valib Boschi), võtate endale kohustuse osta mootor, kontroller, aku, näidik ja muud seadmed. kõik Boschilt paketina.
- Kaubarattad - konkreetsed kaalutlused: Kaubarattaid, eriti ELis, kontrollitakse sageli rangemalt, sest need võivad vedada raskemat koormat või isegi reisijaid. Näiteks Saksamaal on olemas standard (DIN 79010), mis käsitleb spetsiaalselt kaubaratta ohutust (peamiselt mehaanilisi aspekte, nagu raami tugevus ja pidurdamine). Kuigi see standard ei dikteeri kommunikatsiooniprotokolle, on ohutusest lähtuv mõtteviis kaubarattades julgustab kasutama protokolli, mis tagab näiteks, et kui midagi läheb valesti (mootor ülekuumeneb või aku tühjeneb), saab süsteem sellest teada anda ja meetmeid võtta. CANi töökindlus ja veakäitlus aitavad neid ohutuseesmärke täita. Lisaks sellele töötavad kaubaveo e-rattad sageli linnakeskkonnas (tarne linnades), kus on palju raadio-/elektrimüra ja kui teabevahetus toimub valel ajal, on panused suured. . CAN-i mürakindlus on siinkohal suur pluss, mis hoiab ära väärteomenetluse, mis võib viia ebastabiilse käitumiseni.


Elektrisüsteemi ohutusstandardid ja vastavus (EL/USA)
Sõltumata kasutatavast kommunikatsiooniprotokollist peavad e-jalgratta elektrisüsteemid vastama ohutusstandarditele, et tagada nende ohutu ja seaduslik toimimine, eriti sellistel võtmeturgudel nagu Euroopa ja Ameerika Ühendriigid. Kommunikatsiooniprotokoll võib kaudselt mõjutada jalgratta nõuetele vastavust - näiteks protokoll, mis lubab kasutajale piiramatuid muudatusi, võib kujutada endast nõuetele vastavuse riski, samas kui lukustatud protokoll võib aidata tagada, et jalgratas jääb seaduslikesse piiridesse. Võtame asjakohased standardid ja nende omavahelise seose lahti:
Kuidas teabevahetusprotokollid mõjutavad e-ratta vastavust Euroopa Liidus
Euroopa Liit (EL) - EN 15194: ELis liigitatakse enamik e-jalgrattaid (pedaaliga abistatavad jalgrattad, mille mootori võimsus on <= 250 W ja mille abi lõpeb 25 km/h juures) järgmiselt. EPACid (Elektrooniliselt võimsusega toetatud tsüklid). Standard EN 15194 kohaldatakse EPACide suhtes ning määratleb ohutus- ja toimivusnõuded ja katsemeetodid . See hõlmab mehaanilist ohutust (pidurid, raam jne) ja elektrilist ohutust (juhtmestik, EMC jne), samuti tagatakse, et jalgratas vastab kiiruse ja võimsuse piirangutele.
- Sideprotokollide puhul on üks oluline aspekt järgmine elektromagnetiline ühilduvus (EMC): süsteem ei tohiks tekitada liigseid häireid ega olla liigselt häiritud. Hästi projekteeritud CAN- või UART-kommunikatsiooniliin peaks läbima EMC-katsed (EN 15194 viitab EN 55014 või sarnasele EMC-le). . CANi mürakindel olemus võib olla eeliseks nende EMC nõuete täitmisel, kuna see on oma olemuselt parem müra vastu, kuid ka UART-süsteemid võivad nõuetele vastata, kui need on korralikult varjestatud.
- Kiiruse ja võimsuse manipuleerimine: EN 15194 nõuab, et abivahend lülituks välja 25 km/h juures ja et kasutaja ei saaks seda piirväärtust hõlpsasti üle seadusliku väärtuse reguleerida. Kui jalgrattas kasutatakse UARTi ja tootja jätab programmeerimisalused kättesaadavaks, siis kasutaja võiks võimalik, et seda piiratakse - see võib tekitada probleeme seoses nõuete täitmisega. Mõned tootjad kasutavad seetõttu spetsiaalselt lukustatud CAN-süsteeme, et takistada kasutajatel kiirusepiirangu muutmist. Näiteks Bafangi CAN-põhiste mootorite kiiruspiirang on fikseeritud ja seda ei saa ekraani kaudu muuta, mis aitab tagada eeskirjade järgimise kohe karbist välja. Seevastu paljude UART-süsteemide puhul võib asjatundlik kasutaja siseneda ekraanil seadistusrežiimi ja muuta ratta suurust või piirkiirust või kasutada programmeerimiskaablit, mis võib rikkuda seadust, kui ta paneb ratta kiiruse ületama 25 km/h assistendi.
- Elektriohutus: EN 15194 (viimane redaktsioon) hõlmab põhilisi elektriohutusnõudeid, kuid huvitaval kombel ei hõlma täielikult aku ohutust - see eeldab, et akupakett ise peab vastama muudele standarditele. See keskendub rohkem integreerimisele, juhtmestikule ja põhilisele kaitsele (nt ei tohi olla avatud pinge all olevaid osi jne). Sideprotokoll ei mõjuta seda otseselt, kuid kaudselt võib selline protokoll nagu CAN, mis võimaldab BMS-il suhelda kontrolleriga, suurendada ohutust - näiteks võib BMS saata käsu "tühjendamine peatada", kui aku on ülekuumenemas. Kuigi EN 15194 ei nõua seda, aitab selline funktsioon jalgrattal vastata üldistele ohutusnõuetele (vältida termilist läbikukkumist).
Lisaks sellele võivad Euroopa kaubaveo e-rattad (eriti need, mis veavad kaupu/reisijaid) vastata Masinadirektiiv kui need ei kuulu rangelt jalgrattaga sõitmise eeskirjade alla (mõned raskeveokid kuuluvad nende alla). See rõhutab jällegi jõulisi tõrkekindlaid kaitsevahendeid. Vastavusele võib aidata kaasa kindla sideprotokolli kasutamine, millel on tõrkekindel käitumine (näiteks CANi väljalülitamine vea korral).
Rohkem infot ELi e-jalgratta standard
Kuidas kommunikatsiooniprotokollid mõjutavad e-ratta vastavust Ameerika Ühendriikides
Ameerika Ühendriigid - UL 2849 ja teised: USAs on e-jalgratta tootmine föderaalsel tasandil veidi vähem reguleeritud (seal on tarbijale mõeldud toote määratlus, mille kohaselt on madala kiirusega e-jalgratta võimsus maksimaalselt 750 W ja kiirus gaasiga 20 mph/28 mph pedaalide abiga, kuid föderaalselt puuduvad kohustuslikud ehitusstandardid). Siiski, ohutussertifitseerimine on muutumas üliolulisekseriti patareide tulekahjuohu tõttu.
- UL 2849 on Põhja-Ameerika peamine ohutusstandard e-jalgrataste elektrisüsteemidele. See hõlmab kogu e-jalgratta elektrisüsteemi, sealhulgas akut, mootorit, laadijat ja kõiki ühendusi. UL 2849 testimisel vaadeldakse näiteks seda, kas juhtmestik suudab voolu vastu võtta, kas süsteem on kaitstud lühiste vastu ja mis on oluline, see hõlmab ka järgmist. UL 2271 patareide jaoks (mis on akuspetsiifiline ohutusstandard). Kommunikatsiooni osas ei näe UL 2849 ette protokolli, kuid kontrollib, et näiteks kommunikatsiooni kadumisel või rikke tuvastamisel rikub süsteem ohutult (ei toimu termilisi sündmusi, ei jookse mootor läbi). CAN-põhisel süsteemil võib olla väike eelis redundantsi tõestamisel (nt kui gaasipedaali sõnum kaob, suudab CAN seda tuvastada ja aeglustada vastavalt). Kuid isegi UART-süsteeme saab projekteerida nii, et need vastaksid UL 2849 nõuetele (nad vajavad lihtsalt põhjalikku veakäitlust kontrolleri püsivara).
- Tulekahju ja elektrilöögi vältimine: Standardid, nagu UL 2849, keskenduvad elektriliste tulekahjude ja elektrilöökide vältimisele. Näiteks kui e-jalgratta külge on ühendatud laadija, ei tohiks aku ja laadija vaheline side (kui see on olemas) viia ülelaadimiseni. Eelkõige on EnergyBus standard mida me mainisime, mis on CAN-põhine, oli osaliselt motiveeritud ohutusest - tagades, et iga laadija saab ohutult laadida mis tahes akut, suheldes CANopen'i kaudu ja võimaldades toite ainult siis, kui on tehtud nõuetekohane käsitsemine. EnergyBus kasutab spetsiaalset pistikut, mis sisaldab CAN-andmeliinid, nii et laadija ja aku loovad kõigepealt side ja seejärel lubavad laadimisvoolu, et vältida sädemeid või sobimatuid pingeid . See kontseptsioon on hästi kooskõlas UL-i ohutusloogikaga. Kui kaubamärk kasutab EnergyBus't, aitab see tõenäoliselt ohutussertifikaatide läbimisel, sest see juhib loomupäraselt komponentide vahelist ohutut suhtlust.
- Õigusaktide täitmine (kiirus/võimsus): USAs on klassisüsteem (klassid 1, 2, 3) suuresti au süsteem ja seda ei ole nii rangelt kehtestatud kui ELi piiranguid, kuid vastutuse tõttu tagavad tootjad tavaliselt, et 2. klassina müüdavat e-jalgratast ei saa kergesti muuta, et see ületaks näiteks gaasipedaaliga 20 miili tunnis. Ka siin aitab kinnise CAN-protokolli kasutamine - kasutajad ei saa lihtsalt kaablit ühendada ja jalgratta piiranguid tühistada. Märkimisväärne on, et paljud e-jalgrattafirmad reklaamivad nüüd UL-sertifikaadiga akusid või süsteeme, et tagada klientidele ohutus. Näiteks HOVSCO (nagu näha nende teadmistebaasis) rõhutab, et nende jalgrattad vastavad UL 2849 elektrilisele ohutusele ja EN 15194 üldisele ohutusele . See tähendab, et nende juhtmestik, pistikud ja kommunikatsioon peavad kõik toimima ilma ohtu tekitamata.
Rahvusvahelised ja muud standardid: Lisaks EN 15194 ja UL 2849 on olemas ka teisi asjakohaseid standardeid - nt, ISO 4210 (jalgratta ohutusstandard), mille üks osa hõlmab e-jalgratta nõudeid, ja Saksa DIN 79010 kaubarattaid (mida me märkisime, hõlmab selliseid asju nagu raami tugevus kaubakoormuse all ja pidurdustõhusus) . Need ei dikteeri otseselt elektroonikat, kuid kaubaratta standard võib kaudselt nõuda, et näiteks abi ei toimiks raskel koormusel halvasti. Tugev side tagab, et isegi kui jalgratas on koormatud (ja võib-olla on elektriline müra tõusnud või aku vajub), jäävad aku, kontrolleri ja andurite vahelised signaalid usaldusväärseks.
Kokkuvõttes vastavus ja ohutus mõjutavad mõningaid projekteerimisotsuseid UART vs. CAN vahel. Maksimaalset ohutust taotlev tootja võib kalduda veakontrolli ja -juhtimise puhul CANi poole või rakendada UART-süsteemides täiendavaid kaitsemeetmeid. Mõlemad protokollid võivad olla osa turvalisest disainist, kuid võtmetähtsusega on see, kuidas neid kasutatakse. . CAN-süsteemide suletud olemus võib tagada vastavuse (nt kiirusepiirangud, mida kasutajad ei saa seadusega ettenähtud viisil reguleerida) , samas kui UART-süsteemid pakuvad suuremat kasutusvabadust, mis on kahe teraga mõõk.. Tootjad peavad tagama, et isegi UART-põhistel jalgratastel on sellised asjad nagu füüsiline või tarkvaraline piiraja, mida ei saa kergesti häkkida, et jääda seaduslikesse piiridesse.
Lõpuks, sõltumata protokollist, kasutades kvaliteetsed ühendused ja juhtmestik on osa nõuetele vastavusest. ELis peab jalgratas taluma vibratsiooni, ilma et juhtmed lahti läheksid, ja märgades tingimustes, ilma et need lühisesse läheksid. Sellised ühendused nagu Higo/Julet (veekindlad ühendused, mida kasutatakse laialdaselt e-jalgratastel) on populaarsed mitte ainult mugavuse, vaid ka sellepärast, et need aitavad täita IP-klassifikatsioonid ja töökindlusnõuded. CAN-buss kasutab tavaliselt selliseid pistikuid (nt üks Higo 4- või 5-poolne võib kanda CAN-andmeid ja ekraani toite). Protokolli valik ei muuda vajadust hea pingevabastused, isolatsioon ja lukustusliitmikud et vältida katkestusi (mis võivad olla ohtlikud, kui näiteks teie piduri väljalülitamise signaal ei jõua kontrollerini, sest kaabel loksus lahti).
Selle osa lõpetuseks võib öelda, et nii Euroopas kui ka USAs pööratakse praegu suurt tähelepanu e-rataste ohutusele. Vastavus sellistele standarditele nagu EN 15194 ja UL 2849 on mainekate kaubamärkide jaoks üha enam vaieldamatu. Sideprotokoll on üks osa mõistatusest - vahend, mis tagab elektrisüsteemi kooskõlastatud ja tõrgeteta toimimise. CAN-bussi usaldusväärsus võib aidata kaasa nende standardite täitmisele, pakkudes töökindlat sidet, samas kui UART-süsteemid nõuavad hoolikat projekteerimist, et olla sama turvalised. Tootjad valivad sageli protokolli, mis vastab kõige paremini nõuetele vastavuse strateegiale: UART lihtsamate konstruktsioonide puhul, kus riski saab hõlpsasti hallata, või CAN keerukate süsteemide puhul, kus selle turvaomadused paistavad silma.
Kulud ja turukaalutlused sideprotokollide valimisel
Kommunikatsiooniprotokollide vahel otsustamisel (või üldiselt e-ratta elektrisüsteemi projekteerimisel) on oluline tegur kulud - mitte ainult rahalised kulud, vaid ka "kulud" paindlikkuse ja tarnijasuhete osas. Siin on, kuidas kulusid võrrelda ja mida B2B ostjad või insenerid arvestavad:
- Riistvara maksumus: Nagu eespool märgitud, kasutatakse UART-põhises süsteemis tavaliselt lihtsamat riistvara. Kontroller ja ekraan vajavad ainult UART-võimekust, mis on sisseehitatud praktiliselt kõikidesse mikrokontrolleritesse. Juhtmestik võib olla pisut lihtsam (vähem lõpetamise kaalutlusi jne). CAN-põhine süsteem nõuab veidi rohkem: CAN-vastuvõtja kiip igale seadmele ja võimalik, et võimsam MCU (kuigi tänapäeval on isegi üsna odavatel MCU-del CAN sisse ehitatud). Tegelik BOM (Bill of Materials) erinevus võib olla suurtes kogustes vaid mõne dollari suurusjärgus ühe jalgratta kohta, kuid konkurentsile rajatud turul on see siiski oluline. Suure jalgrattapargi tellimuse puhul mitmekordistuvad need dollarid. See tähendab, et CAN-riistvara hind on langenud märkimisväärselt ja see kompromiss võib olla kergesti õigustatud CANi pakutava lisafunktsionaalsuse tõttu.
- Arendus- ja integratsioonikulud: E-rattaga alustavale ettevõttele või väikeettevõttele võib CAN-põhise süsteemi väljatöötamine nullist alates olla kulukas, kui neil ei ole ettevõttesiseseid teadmisi. See võib hõlmata CANiga kursis olevate manussüsteemide inseneride palkamist, investeerimist tööriistadesse ja aja kulutamist kohandatud püsivara arendamiseks. Kui nad aga ostavad valmis süsteemi (näiteks Boschi või Shimano ajamid, mis on CAN-põhised), on nende arenduskulud väiksemad, kuid ühikuhind on kõrgem (Boschi süsteemid on kõrgema hinnaga, osaliselt seetõttu, et nad saavad täielikult integreeritud lahenduse ja kaubamärgi nime). A UART-süsteemi saab sageli kokku panna, kasutades standardkomponente. teadaoleva ühilduvusega - näiteks kasutavad paljud ettevõtted avatud lähtekoodiga või standardprotokolle, kus suur osa tehnilistest lahendustest on juba tehtud ja risk on väiksem. B2B-ostja jaoks (näiteks ettevõte, kes soovib oma kaubamärgi all hulga e-jalgrattaid) võib UARTi kasutamine tähendada, et ta saab hankida odavamaid üldisi osi, samas kui CANi kasutamine tähendab sageli liitumist konkreetse tarnija ökosüsteemiga (mis võib nõuda litsentsi või kõrgemat hinda).
- Müügijärgsed ja hoolduskulud: See jääb mõnikord tähelepanuta. Autopargi operaator (näiteks jalgrattajagamisfirma või kohaletoimetamisfirma) võib leida, et CAN-bussiga jalgrattad säästavad raha hoolduse arvelt. Miks? Sest nad suudavad probleeme diagnoosida eemalt või kiiremini. CAN-ühendusega süsteem saab veakoodid üksikasjalikult esitada (näiteks "aku #2 temperatuurianduri rike" konkreetse koodina). Tehnikud saavad probleemide täpseks tuvastamiseks CAN-bussi diagnostikavahendeid ühendada. See võib vähendada tööaega. Samuti, nagu on näha IoT Venture'i puhul, on võimalik teha selliseid asju nagu firmavara kauguuendused, mis võib säästa jalgrataste füüsilise tagasikutsumise kulusid teatavate paranduste tegemiseks. Teisest küljest võib UART-ratta esialgne hooldus olla lihtsam (võib-olla on vähem asju, mis võivad kommunikatsioonis viltu minna), kuid kui midagi on valesti, peate võib-olla proovima ja eksima, et vahetada osi, sest süsteem ei saa teile täpselt öelda, mis on valesti, peale selle, et võib-olla vilgub valgusdiood. Üksiktarbija jaoks võib UART-ratta remont olla odavam, sest ta saab kasutada standardvarustuses olevaid osi ja kogukonna teadmisi selle parandamiseks, samas kui CAN-ratta puhul on ta sunnitud pöörduma volitatud teenindusse (mis võib olla kallim). Seega on olemas kulude kompromiss kasutaja teenindatavus (UART võidab) ja täiustatud diagnostiline tugi (CAN võidab, mis võib vähendada professionaalsete teenuste kulusid).
- Litsentsimis- ja omandiõiguse kulud: Kaitstud CAN-protokolli kasutamine võib hõlmata litsentsitasusid või piiranguid. Kui jalgrattamark arendab oma CAN-protokolli, on see okei, kuid kui nad kasutavad midagi sellist nagu CANopen või EnergyBus, peavad nad võib-olla järgima standardeid ja võib-olla liituma ühendustega (nt EnergyBus e.V.). Need kulud on üldiselt väikesed, kuid tasub tähele panna. Sellised omandiõigusega süsteemid nagu Bosch tähendavad tegelikult seda, et jalgratta algseadmete valmistaja ostab ajamite paketina; Bosch määrab hinna. UART-süsteemide puhul on sageli suurem konkurents osade tarnijate vahel, mis võib hindu langetada.
- Klientide tajumine ja väärtus: Turunduslikust vaatenurgast võib kaubamärk õigustada kõrgemat hinda jalgratta eest, millel on "autotööstuse CAN-bussi elektroonika", sest see kõlab arenenud ja usaldusväärselt (isegi kui klient ei näe vahet otseselt). Väärtus on olemas esmaklassiline tunnetus ja jõudlus millega CAN-süsteemid sageli kaasas on (tavaliselt on need jalgratastel, millel on ka kvaliteetsed mootorid jne). Seega saavad kõrgema hinnaklassi turule või äriklientidele suunatud kaubamärgid kasutada CAN-süsteeme osana kõrgema hinnaklassi pakkumisest. Seevastu algtaseme e-rataste puhul on klientidele tähtis, et see toimiks ja oleks taskukohane - nad ei maksa lisatasu vaid seetõttu, et jalgratta ekraan kasutab UARTi asemel CANi. Niisiis, protokolli valik peaks olema kooskõlas jalgratta turusegmendiga.
- Tulevikukindlus: Kulu, mida insenerid arvestavad, on tulevikukindluse puudumise alternatiivkulu. Kui te investeerite praegu UART-põhisesse platvormi, kuid järgmisel aastal soovite lisada rohkem funktsioone (näiteks teise aku või uue anduritüübi), siis võib vana platvormi kasutamine osutuda piiravaks, mis sunnib teid ümber projekteerima. Mõned ettevõtted otsustavad, et pikemas perspektiivis on kuluefektiivsem kasutada algusest peale CAN-platvormi, isegi kui seda ei kasutata täielikult, et jätta ruumi uute funktsioonide ja lisaseadmete jaoks. See võib hiljem säästa ümberarendamiskulusid. See on strateegiline otsus: maksta algselt veidi rohkem kui hiljem potentsiaalselt palju rohkem, et uuendada.
Mis puudutab tegelikke hinnanumbreid: seda on raske täpselt kindlaks teha, kuid tööstusharu sisering võib öelda, et näiteks põhiline UART-elektroonilise jalgratta kontroller + ekraanikomplekt võib olla lahtiselt näiteks $50-$100, samas kui samaväärne CAN-põhine komplekt suurelt kaubamärgilt võib olla mõnisada dollarit (sest see on keerulisem). See vahe hõlmab aga sageli ka paremat mootori jõudlust, garantiid jne, mitte ainult kommunikatsioonierinevust. . lisakulu üksnes protokolli puhul (näiteks CAN-kiibi lisamine) on väike, kuid ökosüsteemi kulud (sidumine kalli süsteemiga võrreldes odava geneerilise süsteemiga) võib olla suur.
B2B e-jalgratta ostja jaoks lihtsalt öeldes:
- Kui teie prioriteet on madalaim ühikuhind ja soovite paindlikult hankida mitmelt tarnijalt, siis on võimalik kasutada UART-põhine avatud süsteem on atraktiivne. Saate teha sisseoste sobivate kuvarite ja kontrollerite leidmiseks, võib-olla isegi pidada läbirääkimisi mitme tehasega.
- Kui teie prioriteet on jõudlus, usaldusväärsus ja võtmed kätte süsteem (ja olete valmis selle eest maksma), on üks CAN-põhine süsteem usaldusväärselt tarnijalt võib säästa teile peavalu ja anda tootele lisaväärtust (kõrgema hinna eest, mille loodetavasti katate oma jalgrataste kõrgema hinnakujunduse või mahutõhususe kaudu).
Piirangud ja tulevased suundumused
Isegi kui me ülistame UARTi ja CANi voorusi, tasub märkida, et piirangud e-jalgrattaga seotud teabevahetuse praeguse seisu kohta ja kuhu asjad võivad areneda:
- Kogu tööstusharu hõlmava standardiseerimise puudumine: Erinevalt automaailmast, kus peaaegu kõik autod kasutavad CAN-bussi ja standardiseeritud diagnostikat (OBD-II), on e-jalgrattatööstus endiselt killustunud. On olemas ei ole ühtset universaalset protokolli mida kasutavad kõik e-jalgrattad. UART-i rakendused on erinevad (igal tootjal võivad olla erinevad andmeformaadid UART-i kaudu) ja CAN-i rakendused on sageli patenteeritud. See on tarbijate ja jalgratta kokkupanijate jaoks piirang - see ei ole erinevate kaubamärkide vahel "plug and play". Te ei saa võtta suvalist ekraani ja eeldada, et see töötab suvalise kontrolleriga, kui nad ei kasuta selgesõnaliselt sama protokolli ja püsivara. EnergyBus on paljulubav püüdlus standardiseerida (CANopen CiA-454 määratleb sõnumeid e-jalgratta komponentide jaoks), kuid see ei ole veel levinud. Kui EnergyBus või muud sarnased standardid hakkavad levima, võime näha tõeliselt koostalitlusvõimelisi komponente - näiteks tootja X akut saab kasutada tootja Y mootorisüsteemiga, kusjuures CANopenil põhinev protokoll tagab, et nad mõistavad teineteist. See tooks kasu B2B-ostjatele (rohkem tarnijavõimalusi) ja tarbijatele (rohkem uuendus-/remondivõimalusi). Samas on tööstusharu osalistel ka ärilised motiivid säilitada omaette süsteemid (et lukustada kliente). Pinged järgmiste valdkondade vahel standardimine vs. omandiõiguse kontroll kujundab e-jalgratta protokollide tulevikku.
- Ribalaius ja andmevajadus: Praegu on e-jalgratta side suhteliselt väikese andmemahuga. Kuid tulevased e-jalgrattad võivad edastada rohkem teavet - kujutage ette, et kogutakse kõrgsageduslikke pöördemomendiandurite andmeid või kõrge resolutsiooniga võimsusnäitajaid treeningu eesmärgil või isegi videoid kaameratest ohutuse tagamiseks. CAN klassikalistel kiirustel võib muutuda kitsaskohaks, kui tuleb saata palju andmeid. Autotööstuses on olemas CAN-FD (CANi laiendatud versioon, millel on suuremad andmekaadrid ja suurem läbilaskevõime) ja muud protokollid, nagu Ethernet, suure ribalaiusega vajaduste jaoks. Elektrooniliste jalgrataste puhul võib vajaduse korral lõpuks kasutusele võtta CAN-FD või BLE/Wi-Fi andmelogide mahalaadimiseks. Traadita side võib täiendada ka juhtmega protokolle: juba praegu kasutavad paljud e-jalgrattad Bluetooth Low Energy'd, et ühendada jalgratas nutitelefoni rakendusega. See ei kuulu sisemise elektrisüsteemi reguleerimisalasse, kuid seda tasub paralleelkanalina tähele panna. Võib-olla võivad mõned lihtsamad e-jalgrattad tulevikus isegi loobuda juhtmega ekraanist ja kasutada juhtmevaba moodulit telefoniga - kuigi kriitiline juhtimine (näiteks gaasipedaali või pidurisignaalid) jääks usaldusväärsuse huvides tõenäoliselt juhtmega ühendatuks. Kaubaparkides võime näha rohkem V2X (vehicle-to-everything) kommunikatsiooni integreerimist - e-jalgrattad räägivad logistikasüsteemidega või liiklusinfrastruktuuriga, mis jällegi asetatakse põhilise CAN-bussisüsteemi peale.
- Turvalisusega seotud probleemid: Kuna e-jalgrattad ühendatakse ja kasutavad keerukamat sidet, küberturvalisus muutub murettekitavaks. UART-süsteem, millel puudub väline ühendus, on praktiliselt immuunne häkkimise vastu (keegi peaks füüsiliselt juhtmetele ligi pääsema). Kuid CAN-buss, mis on ühendatud Bluetooth-mooduli või GSM-mooduliga (laevastiku jälgimiseks), tekitab potentsiaalsed haavatavused. Tootjad peavad tagama, et nende protokollid (eriti traadita liideseid bussiga) on turvalised, et vältida pahatahtlikku kontrolli (kujutage ette asjade interneti häkkimist, mis võiks kaugjuhtimise teel välja lülitada terve autopargi jalgrattaid - kaugeleulatuv, kuid teoreetiliselt võimalik stsenaarium, kui see ei ole turvatud). Omanikuprotokollid on oma olemuselt mõnevõrra turvalised, kuid kui CAN muutub e-jalgrataste puhul üldtuntuks, võivad pahalased üritada CAN-sõnumeid sisestada avatud pordi kaudu. Seega võime tulevikus näha rohkem krüpteerimist või autentimist e-jalgrattasides.
- Kasutajakogemus: Lõppkokkuvõttes, ükskõik millist protokolli kasutatakse, peaks see tagama hea kasutajakogemuse. Sõitjad hoolivad sellistest asjadest nagu sujuv energiatarne, täpne teave ekraanil ja vajaduse korral toimivad turvaelemendid. Varasemate CAN-põhiste süsteemide piiranguks oli see, et need olid mõnikord liiga lukustatud - kasutajad tundsid end pettununa, et nad ei saanud isegi lihtsaid eelistusi muuta. Kui süsteemid arenevad, võivad tootjad leida viise, kuidas anda kasutajatele paindlikkust (volitatud rakenduste või seadistuste kaudu), ilma et kontroll väheneks. Näiteks võiks rakendus lubada piiratud häälestamist (turvalistes piirides) isegi CAN-süsteemis või lubada sertifitseeritud kolmandate osapoolte lisaseadmete suhtlemist bussis (võib-olla EnergyBus'i standardsõnumeid kasutades). Protokollide standardiseerimise käigus võime oodata veidi suuremat avatust, irooniliselt isegi CAN-maailmas.
Kokkuvõtteks võib öelda, et e-jalgratta elektriline sidesüsteem - kas UART või CAN - on jalgratta jõudluse, ohutuse ja modulaarsuse seisukohalt ülioluline.. Elektroonilisi jalgrattaid projekteerivad insenerid peavad tasakaalustama UARTi lihtsuse ja CANi keerukuse vahel. B2B-ostjad peavad kaaluma, kuidas valik mõjutab kulusid, tarneahelat ja oma toote väärtust. Tundub, et tööstus kaldub CAN-bussi poole, kuna e-jalgrattad arenevad üha enam ühendatud ja võimekamateks masinateks, kuid UART-põhised süsteemid jäävad tõenäoliselt veel mõnda aega lihtsamate ja odavamate mudelite jaoks paralleelseks (lõppude lõpuks on need suurele osale sõitjatest piisavalt head).
Mõistes neid kommunikatsiooniprotokolle - sisuliselt elektrikeel e-jalgrattaid - saab palju sügavamalt aru, kuidas e-jalgratas sisemiselt töötab. Alates gaasipedaali keeramisest või pedaalide vajutamisest kuni mootori hüppelise töötamise ja ekraanil kuvatavate numbriteni - kõik see on võimalik bitide ja baitide abil, mis liiguvad mööda juhtmeid, tagades, et aku, mootor ja sõitja on sünkroonis.. Ükskõik, kas tegemist on elegantse linnarattaga või raskeveokiga, see harmoonia on see, mis muudab sõidu vaevata ja turvaliseks. Lõppkokkuvõttes on iga protokolli eesmärk, et tehnoloogia jääks tagaplaanile, nii et sõitjad saaksid lihtsalt nautida reisi - kuid nüüd loodetavasti ka veidi aimu nende jalge all toimuvast muljetavaldavast elektroonilisest koordineerimisest.
Allikad:
- Qiolor Ebike Guide - "Kuidas valida ühilduva ekraani oma Ebike kontrolleri jaoks" (2025) - arutatakse UART vs CANBUS keelt ja protokollide sobitamise olulisust.
- Velco.tech - "CAN vs UART: erinevused kommunikatsiooniliikide vahel" (2024) - selgitatakse UARTi lihtsust võrreldes CANi võrguvõimalustega ja loetletakse nende eelised/piirangud .
- Biktrixi abikeskus - "Mis on CANBUS ja UART protokollid?" - kasutajakeskne vaade sellele, kuidas CAN lukustab seaded (kiiruspiirang fikseeritud) vs UART võimaldab muudatusi , lisaks võrdlus ekraani vahetatavuse kohta.
- IoT Venture (juhtumiuuring CYCLE'i sõidukipargi puhul) - kirjeldatakse CAN-integratsiooni eeliseid e-rattaparkides: juurdepääs hooldusandmetele, mootori kauglülitamine, OTA-uuendused .
- HOVSCO teadmised - "Millised turvaelemendid on elektrijalgratastel?" - märkused EN 15194 (EL) kohta, mis tagab kiiruse/võimsuse piirangud ja vastupidavuse, ja UL 2849 (USA) kohta, mis keskendub elektri- ja tuleohutusele, samuti mainitakse DIN 79010 kohta, mis käsitleb kaubaratta ohutust.
- Texas Instruments App Note - "BLDC-mootorit kasutava elektrijalgratta riistvara projekteerimise kaalutlused" - andis tüüpilise e-jalgratta süsteemi plokkskeemid ja ülevaate juhtelektroonikast.
- Letrigo Ebike teadmised - "E-rattakuvarite juhtmestik selgitatud" - üksikasjad juhtmestiku ja pistikute (Higo/Julet) kohta ning hoiatab, et universaalset juhtmestiku standardit ei ole olemas, rõhutades ühenduste nõuetekohast sobitamist ja tugevat juhtmestikku signaali terviklikkuse tagamiseks.
- EnergyBus standard - Sissejuhatus Kvaserilt - kirjeldab EnergyBus't kui avatud CANopen-põhist LEV-komponentide standardit, et tagada tootjate vaheline ühilduvus ja ohutus .




