
Le biciclette elettriche (e-bike), comprese le cargo e-bike, si basano su un intricato sistema elettrico che collega batteria, motore, controller, sensori e interfaccia utente. I protocolli di comunicazione di questo sistema fungono da "linguaggio" che consente a tutti questi componenti di coordinarsi senza soluzione di continuità. In questa panoramica di divulgazione scientifica, spiegheremo cosa sono questi protocolli di comunicazione e come funzionano all'interno dei sistemi elettrici delle e-bike. Verranno illustrati i tipi di protocolli utilizzati, le loro differenze, i campi di applicazione, i pro e i contro, le considerazioni sui costi, la conformità agli standard di sicurezza nell'UE e negli USA e le limitazioni. L'obiettivo è fornire una guida chiara e autorevole ai nostri clienti e al nostro pubblico, bilanciando la profondità tecnica con la comprensione pratica.
Componenti chiave delle biciclette elettriche: il "sistema nervoso".
Le biciclette elettriche possono essere considerate come dotate di un sistema nervoso centrale di cavi e collegamenti dati che collegano tutti i componenti critici. Proprio come i nervi trasportano i segnali nel corpo, il cablaggio trasporta sia i segnali di potenza che quelli di dati attraverso la bicicletta. I componenti chiave di un tipico impianto elettrico per e-bike sono:

- Pacco batteria: La fonte di alimentazione in corrente continua (generalmente 36-48 V) che fornisce energia al sistema. Si collega al controllore tramite cavi di alimentazione spessi (con fusibili o interruttori per la sicurezza) per erogare la corrente principale. Alcune batterie avanzate dispongono anche di un collegamento dati (tramite linee di comunicazione) per condividere i segnali di stato o di controllo con il controllore.
- Motore e controller: Il motore (motore al mozzo in una ruota o un mid-drive alla pedivella) riceve energia dal controller del motore, che è il "cervello" che regola l'uscita del motore in base agli input del ciclista e al feedback dei sensori. Il controller è un'unità elettronica con un microprocessore che riceve i segnali (acceleratore, sensore del pedale, freni, ecc.) e gestisce l'alimentazione del motore. I motori hanno tipicamente fili di fase (cavi pesanti che trasportano l'alimentazione) e fili di sensore (cavi sottili dai sensori a effetto Hall che forniscono un feedback sulla posizione del rotore) che vanno al controller.
- Interfaccia umana (acceleratore, sensore di pedalata, display): Il ciclista comunica con l'e-bike attraverso dispositivi come l'acceleratore (spesso un'impugnatura del manubrio con un sensore a effetto Hall che emette un segnale di tensione variabile per richiedere la velocità) e il sensore di pedalata assistita (PAS) che rileva il movimento della pedalata tramite magneti e sensori. L'unità di visualizzazione sul manubrio mostra la velocità, il livello della batteria, il livello di assistenza, ecc. e spesso include pulsanti per la regolazione delle impostazioni da parte del ciclista. Il display e l'unità di controllo si scambiano dati attraverso un cavo multifilare che comprende linee di alimentazione e di comunicazione.
- Interruttori di sicurezza (leve dei freni): Le leve dei freni delle biciclette elettriche sono solitamente dotate di interruttori di sicurezza che inviano un segnale al controller per interrompere immediatamente l'alimentazione del motore in caso di frenata. In genere, viene utilizzato un semplice circuito a due fili che funge da segnale on/off per il controller.
- Illuminazione e accessori: Molte e-bike integrano anche luci anteriori/posteriori, clacson, caricabatterie USB, ecc. Questi possono essere controllati dal controller principale o funzionare su circuiti separati, ma nei sistemi di fascia alta possono essere indirizzati anche attraverso il bus di comunicazione.
Per una guida dettagliata agli accessori per le ebike e le cargo bike, è possibile leggete questo articolo per una risposta più completa , o forse controllare il nostro Cargo Bike 101 pagina.
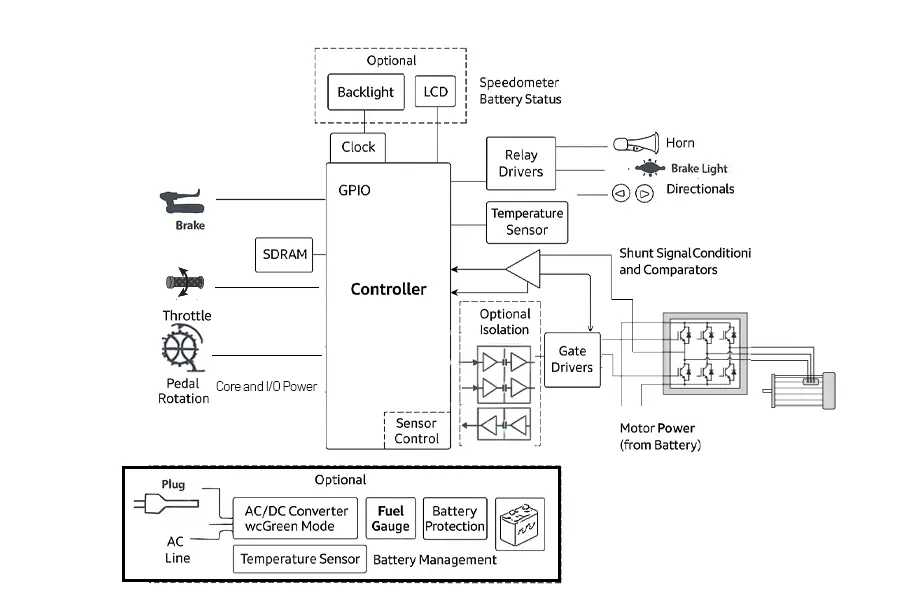
Figura 2: Schema a blocchi di un tipico sistema di controllo e gestione della batteria di una bicicletta elettrica. Il controller centrale si interfaccia con gli ingressi chiave - acceleratore, sensori dei pedali, leve dei freni - e gestisce le uscite, come i segnali di azionamento del motore, tramite driver di gate, driver di relè e connessioni GPIO. Moduli opzionali come display LCD, caricabatterie, indicatori di carburante e retroilluminazione ampliano le funzionalità del sistema. La comunicazione tra i componenti supporta il coordinamento in tempo reale dell'alimentazione del motore, dell'illuminazione, delle interruzioni di sicurezza e del monitoraggio dello stato della batteria.
Quali sono i protocolli di comunicazione delle biciclette elettriche?
Nel contesto delle biciclette elettriche, i protocolli di comunicazione si riferiscono al metodo e al formato con cui i componenti elettronici si scambiano i dati. Le prime biciclette elettriche, o quelle di base, spesso non disponevano di una rete digitale complessa: molti segnali erano analogici o semplici circuiti on/off. Ad esempio, l'acceleratore invia una tensione analogica per indicare la potenza desiderata dal ciclista, mentre l'interruttore del freno apre o chiude semplicemente un circuito per interrompere la potenza. Tuttavia, man mano che le biciclette elettriche sono diventate più sofisticate, con display intelligenti, sensori avanzati e persino l'integrazione di GPS o smartphone, è nata l'esigenza di una comunicazione digitale più robusta.
Oggi sono due i principali protocolli di comunicazione digitale che dominano i sistemi per biciclette elettriche:
- UART (Universal Asynchronous Receiver-Transmitter): Un metodo di comunicazione seriale che crea un collegamento dati diretto uno-a-uno tra due dispositivi (in genere il controllore e il display).
- Bus CAN (Controller Area Network): Un protocollo di rete che consente a più dispositivi (controller, display, BMS della batteria, sensori, ecc.) di comunicare sugli stessi fili del bus condiviso.
Oltre a UART e CAN Bus, altri due protocolli di comunicazione sono occasionalmente utilizzati nei sistemi di e-bike:
- SIF (Serial Interface Format): Si tratta di un protocollo proprietario o semplificato comunemente presente in alcuni sistemi di marca (ad esempio Shimano STEPS o unità di visualizzazione più vecchie). In genere viene utilizzato per lo scambio di dati di base tra il controller e il display o i pulsanti remoti. Poiché il SIF manca di una standardizzazione aperta e di flessibilità, è per lo più limitato a marche specifiche o a modelli precedenti.
- RS-485 (standard consigliato 485): L'RS-485 è un protocollo di comunicazione seriale di livello industriale noto per la sua affidabilità sulle lunghe distanze e la resistenza ai disturbi. Sebbene non sia comune come l'UART o il CAN nelle biciclette elettriche di consumo, è presente in alcuni sistemi per flotte commerciali o di fascia altasoprattutto quando sono richiesti robustezza e cablaggi prolungati, come nel caso delle biciclette condivise, delle flotte di noleggio o delle biciclette elettriche per impieghi gravosi.
Questi protocolli sono essenzialmente i "linguaggi" dell'elettronica dell'e-bike. Se tutti i componenti parlano la stessa lingua, le informazioni fluiscono correttamente; in caso contrario, i dispositivi non si capiscono. Ecco perché la corrispondenza del protocollo è fondamentale, ad esempio, quando si accoppia un display con un controller. Anche se la spina si adatta, un'incompatibilità nel protocollo significa che le parti non funzioneranno insieme.
Panoramica sull'utilizzo del mercato (tendenze stimate per il 2024-2025)
Sebbene non esista una ripartizione universalmente pubblicata dell'utilizzo dei protocolli nel mercato delle e-bike, sulla base delle intuizioni del settore e dei principali fornitori di sistemi (ad esempio Bosch, Bafang, Shimano, Mahle, ecc.), si può affermare quanto segue. distribuzione ragionevole stimata a partire dal 2025:
| Protocollo | Quota di utilizzo (stimata) | Applicazioni comuni | Note |
|---|---|---|---|
| UART | ~50-60% | Biciclette elettriche di livello base e medio | Ampiamente utilizzato grazie alla semplicità e al basso costo |
| Bus CAN | ~30-35% | Biciclette elettriche di fascia alta, intelligenti o modulari | Aumentare l'adozione con l'integrazione intelligente |
| RS-485 | ~5-10% | Sistemi per flotte, installazioni commerciali a filo lungo | Limitato a casi d'uso specifici |
| SIF / Proprietario | <5% | Sistemi specifici del marchio o legacy | Si trovano per lo più in ecosistemi vecchi o bloccati. |
Nota: Queste cifre sono generalizzate ai mercati globali (UE, CN, NA) e si basano sulle tendenze dei produttori OEM, sulla documentazione pubblica, sui dati dei teardown e sulle conoscenze dei fornitori di componenti.
Definire i protocolli di comunicazione delle biciclette elettriche in modo più semplice.
In parole povere, i protocolli di comunicazione delle biciclette elettriche sono i seguenti linguaggi o regole che permettono alle diverse parti elettroniche di parlare tra loro. Se i componenti non parlano la stessa lingua, non possono capirsi, anche se la spina si adatta fisicamente.
📞 Analogia: Chiamata individuale vs. chat di gruppo
Immaginiamo due modi di comunicare nella vita quotidiana per capire i protocolli delle e-bike:
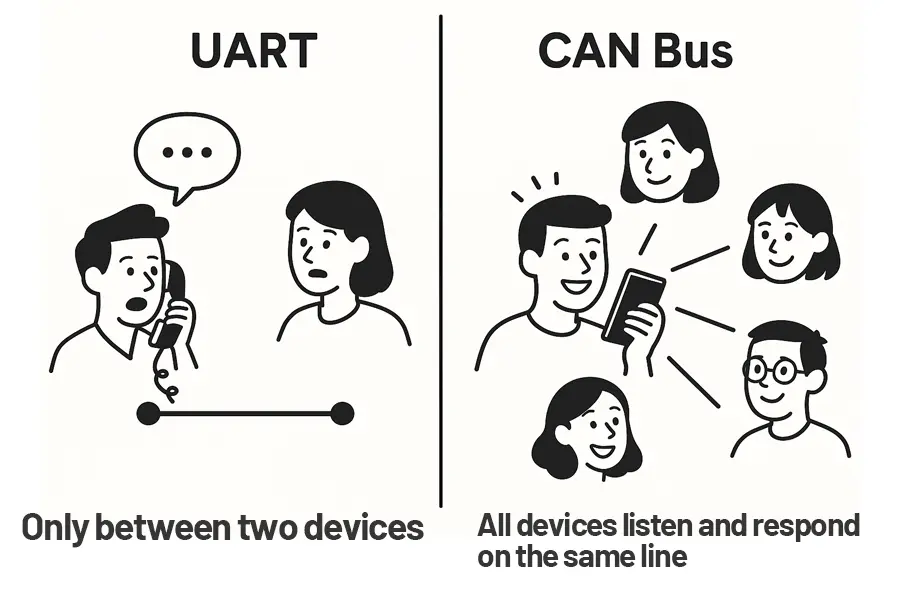
UART: come una telefonata a tu per tu
- UART (Universal Asynchronous Receiver-Transmitter) è come chiamare un amico al telefono.
- Solo due dispositivi come il display e il controllore.
- Se si desidera parlare con un altro dispositivo, occorre un altro filo (o un'altra telefonata).
- È semplice, ma non è scalabile quando si hanno molti dispositivi.
- Comune in sistemi di base per biciclette elettriche con caratteristiche limitate.
AN Bus: come una chat di gruppo
- Il Bus CAN (Controller Area Network) è come un chat di gruppo su WhatsApp o WeChat.
- Tutti i dispositivi (controller, batteria, display, sensore, luci) sono nella stessa chat.
- Ogni messaggio è contrassegnato da un ID mittente e ogni dispositivo legge solo i messaggi a lui destinati.
- È molto più efficiente e ideale quando ci sono molti componenti che devono lavorare insieme.
- Utilizzato in sistemi intelligenti e avanzati per biciclette elettrichespesso con GPS, Bluetooth e integrazione di app.
| Caratteristica | UART (chiamata telefonica) | CAN Bus (chat di gruppo) |
|---|---|---|
| Tipo di connessione | Uno a uno (punto a punto) | Uno-a-molti (bus condiviso) |
| Scalabilità | Basso - necessita di cavi aggiuntivi per più dispositivi | Alto - più dispositivi condividono gli stessi fili |
| Flusso di comunicazione | Solo tra due dispositivi | Tutti i dispositivi ascoltano e rispondono sulla stessa linea |
| Complessità | Semplice | Più complesso ma potente |
| Caso d'uso | Biciclette elettriche di base (solo display ↔ controller) | Biciclette elettriche intelligenti con BMS, app, sensori, ecc. |
Il ruolo dei protocolli di comunicazione
I protocolli di comunicazione nelle biciclette elettriche hanno diversi scopi importanti:
- Condivisione dei dati: Consentono al controller di inviare dati in tempo reale al display (velocità, stato di carica della batteria, codici di errore) e di ricevere comandi in risposta (ad esempio, modifica del livello di assistenza, accensione/spegnimento delle luci). Senza un protocollo adeguato, si rischia di non ottenere una lettura affidabile della velocità o di non poter regolare le impostazioni.
- Coordinamento dei componenti: Nei sistemi avanzati, più microcontrollori devono coordinarsi tra loro. Ad esempio, una batteria intelligente con un proprio sistema di gestione della batteria (BMS) può comunicare con il controller del motore per evitare sovracorrenti o per visualizzare la percentuale esatta della batteria. Un bus CAN o una rete simile consente alla batteria, al controller del motore, al display e persino ai sensori di condividere le informazioni in una rete multi-nodo.
- Sicurezza e affidabilità: Un protocollo ben progettato garantisce che, in caso di guasto o perdita di segnale (ad esempio un cavo danneggiato), il sistema sia in grado di rilevarlo e di intraprendere un'azione sicura (come l'interruzione dell'alimentazione del motore). Protocolli robusti come il CAN includono il controllo degli errori e la prioritizzazione dei messaggi per gestire questo problema. I segnali analogici più semplici sono privi di tale gestione degli errori: se un cavo dell'acceleratore si allenta, il controllore potrebbe interpretare erroneamente un rumore come un segnale di accelerazione, a meno che non siano previste misure di sicurezza.
- Espandibilità: Per le biciclette elettriche ricche di funzioni (localizzatori GPS, immobilizzatori antifurto, sensori di assistenza multipli, ecc.), una rete di comunicazione rende più facile aggiungere o rimuovere dispositivi. Invece di avere un collegamento elettrico dedicato con il controller, ogni nuovo dispositivo può unirsi al bus comune e condividere i dati con tutti gli altri. Questa scalabilità è uno dei motivi principali per cui le moderne biciclette elettriche di fascia alta si stanno orientando verso il CAN bus.
In sintesi, il protocollo di comunicazione è la spina dorsale del sistema elettrico dell'e-bike, in grado di garantire che tutte le parti elettroniche funzionino in modo concertato. In un altro post, approfondiremo i due tipi di protocollo principali (UART e CAN), esaminando il funzionamento di ciascuno e i rispettivi casi d'uso nelle e-bike. biciclette elettriche cargo. controllate se siete interessati:
- "Capire l'UART nelle biciclette elettriche: Come la semplice comunicazione seriale alimenta la vostra guida"
- Una guida per principianti su come l'UART consente lo scambio di dati di base tra componenti di e-bike come display e controller.
- "Che cos'è il CAN Bus nelle biciclette elettriche? Un modo più intelligente per collegare batterie, sensori e altro ancora".
- Scoprite come le moderne biciclette elettriche utilizzano il CAN Bus per supportare la comunicazione tra più dispositivi, i display avanzati e la diagnostica del sistema.
Scenari applicativi: Quale protocollo di comunicazione per quale bicicletta elettrica?
È utile capire come UART e CAN vengono scelti nella pratica per diversi progetti di e-bike. Prenderemo in considerazione due grandi categorie: biciclette elettriche di consumo (comprese le tipiche biciclette da pendolari o da tempo libero) E e-bike cargo/fleet (spesso utilizzate per consegne aziendali o da flotte di noleggio), notando che spesso queste hanno priorità diverse.

- E-Bike standard per i consumatori (City, Mountain, Road e-bike): Sono le biciclette che molti individui acquistano per uso personale. Vanno dal modello base a quello di fascia molto alta. Nella fascia bassa (modelli sensibili al costo), la comunicazione UART è estremamente comune. Ad esempio, una semplice e-bike da 36 V per pendolari con un sensore di cadenza e un display a LED di base probabilmente utilizza un UART (o anche segnali analogici) tra il controller e il display minimo di cui dispone. L'obiettivo è economicità e funzionalità di base. Molte biciclette di questo tipo utilizzano controller e display ampiamente disponibili che aderiscono a un protocollo UART de facto, il che significa che i marchi di biciclette possono rifornirsi di componenti da diversi OEM. Questo è interessante per gli acquirenti B2B che vogliono la flessibilità di utilizzare, ad esempio, un display più bello del fornitore A con un controller del fornitore B: finché entrambi parlano UART nello stesso formato, può funzionare (anche se è necessario verificare la compatibilità con la piedinatura e il firmware). Sulle biciclette consumer di fascia alta, soprattutto quelle prodotte da grandi marchi, c'è una tendenza verso il CAN bus. Le e-MTB o le bici da strada ad alte prestazioni con sensori di coppia e display di fantasia potrebbero utilizzare il CAN per integrare tutto senza problemi. Tuttavia, alcuni marchi utilizzano ancora UART o altri collegamenti seriali proprietari anche nelle biciclette di fascia alta; la scelta varia a seconda del produttore e della sua filosofia di progettazione.

- Le biciclette elettriche da carico e le flotte commerciali: Le e-bike cargo sono progettate per trasportare carichi pesanti o passeggeri e sono spesso utilizzate dalle aziende (servizi di consegna, biciclette postali, ecc.). Queste biciclette tendono a privilegiare robustezza, sicurezza e capacità di gestione della flotta rispetto al costo dell'elettronica. È in questo segmento che il CAN bus ha guadagnato terreno. Ad esempio, le biciclette da carico possono avere doppie batterie per estendere l'autonomia - la gestione di due batterie richiede una comunicazione per bilanciare la scarica o almeno per segnalare lo stato di ciascuna. Il CAN facilita la comunicazione tra un controller e due unità BMS (una per ogni batteria) sullo stesso bus. Le biciclette cargo possono anche avere accessori aggiuntivi: luci dei freni, indicatori di direzione, persino serrature elettroniche - il coordinamento di questi accessori tramite un bus centrale semplifica il cablaggio e il controllo. Inoltre, poiché le cargo e-bike operano spesso in flotte, le aziende preferiscono avere telematica su di esse: Tracciatori GPS in grado di segnalare la posizione della moto, l'utilizzo ed eventuali guasti. Con un sistema abilitato CAN, un modulo telematico può semplicemente intercettare i messaggi CAN relativi a velocità, stato della batteria e così via, e caricare tali informazioni. In effetti, un caso di studio su una flotta di consegne europea ha dimostrato che l'accesso al bus CAN consentiva il monitoraggio remoto dei dati di manutenzione (come il chilometraggio), la disattivazione remota del motore per l'antifurto e l'aggiornamento over-the-air del firmware della bicicletta, funzioni estremamente utili per la gestione della flotta. Tutto questo sarebbe complicato da implementare su una bicicletta basata su UART.
- Sistemi misti o integrati: Se un marchio di e-bike vuole avere la libertà di mescolare i componenti o di consentire aggiornamenti aftermarket, tende ad attenersi ai sistemi basati su UART. Abbiamo visto che I sistemi UART consentono di scambiare i display o di modificare prontamente le impostazioni del motore.Un'azienda di biciclette elettriche più piccola potrebbe preferire questa strada per evitare di essere vincolata a un unico fornitore: può cambiare fornitore di motori/controllori senza cambiare l'intero ecosistema, a patto che il protocollo rimanga UART e che possa adattare il firmware. D'altra parte, I marchi che si concentrano sull'ottimizzazione del sistema e sulla conformità spesso scelgono CAN. Ad esempio, le biciclette elettriche Bosch utilizzano un bus simile al CAN (Bosch ha un protocollo proprietario basato sul CAN) che collega il motore, il display e la batteria. Questo garantisce che nessun componente di terze parti possa interferire; tutto è finemente sintonizzato insieme. L'aspetto positivo è l'eccellente affidabilità e sicurezza: il sistema segnala un errore se qualcosa non è in linea con le specifiche. L'aspetto negativo è che un acquirente B2B (come un costruttore di biciclette che sceglie Bosch) si impegna ad acquistare il motore, il controller, la batteria e il display. Tutto da Bosch come pacchetto.
- Biciclette da carico - Considerazioni specifiche: Le biciclette da carico, soprattutto nell'UE, sono spesso soggette a controlli più severi perché possono trasportare carichi più pesanti o addirittura passeggeri. In Germania, ad esempio, esiste uno standard (DIN 79010) specifico per la sicurezza delle biciclette da carico (soprattutto aspetti meccanici come la resistenza del telaio e la frenata). Anche se questo standard non detta i protocolli di comunicazione, il mentalità orientata alla sicurezza nelle biciclette da carico incoraggia l'uso di un protocollo in grado di garantire, ad esempio, che se qualcosa va storto (motore surriscaldato o batteria scarica), il sistema possa comunicarlo e intervenire. La robustezza e la gestione degli errori del CAN aiutano a raggiungere questi obiettivi di sicurezza. Inoltre, le cargo e-bike operano spesso in ambienti urbani (consegne in città) dove c'è molto rumore radio/elettrico e la posta in gioco è alta se si verifica un errore di comunicazione nel momento sbagliato. Il immunità al rumore del CAN è un grande vantaggio, in quanto impedisce una comunicazione errata che potrebbe portare a un comportamento irregolare.


Standard di sicurezza e conformità del sistema elettrico (UE/USA)
Indipendentemente dal protocollo di comunicazione utilizzato, i sistemi elettrici delle biciclette elettriche devono rispettare gli standard di sicurezza per garantire un funzionamento sicuro e legale, soprattutto in mercati chiave come l'Europa e gli Stati Uniti. Il protocollo di comunicazione può influire indirettamente sulla conformità di una bicicletta: ad esempio, un protocollo che consente modifiche illimitate da parte dell'utente può rappresentare un rischio per la conformità, mentre uno bloccato può contribuire a garantire che la bicicletta rimanga entro i limiti di legge. Analizziamo gli standard pertinenti e il loro rapporto:
Come i protocolli di comunicazione influenzano la conformità delle biciclette elettroniche nell'Unione Europea
Unione Europea (UE) - EN 15194: Nell'UE, la maggior parte delle biciclette elettriche (biciclette a pedalata assistita con potenza del motore <= 250W e interruzione dell'assistenza a 25 km/h) è classificata come EPAC (Cicli assistiti elettronicamente). Lo standard EN 15194 si applica alle EPAC e definisce i requisiti e i metodi di prova per la sicurezza e le prestazioni. Ciò include la sicurezza meccanica (freni, telaio, ecc.) e la sicurezza elettrica (cablaggio, EMC, ecc.), oltre a garantire che la bicicletta rispetti i limiti di velocità e potenza.
- Per i protocolli di comunicazione, un aspetto rilevante è compatibilità elettromagnetica (EMC)Il sistema non dovrebbe emettere interferenze eccessive o essere indebitamente influenzato da interferenze. Una linea di comunicazione CAN o UART ben progettata dovrebbe superare i test EMC (la norma EN 15194 fa riferimento alla norma EN 55014 o simili per l'EMC). Il natura resistente al rumore del CAN può essere un vantaggio per soddisfare questi requisiti EMC, in quanto gestisce intrinsecamente meglio il rumore, ma anche i sistemi UART possono essere conformi se opportunamente schermati.
- Manomissione della velocità e della potenza: La norma EN 15194 richiede che l'assistenza si interrompa a 25 km/h e che l'utente non possa facilmente regolare questo limite oltre il valore legale. Se una bicicletta utilizza l'UART e il costruttore lascia accessibili i pad di programmazione, un utente potrebbe potenzialmente deresponsabilizzarlo, il che potrebbe sollevare problemi di conformità. Alcuni produttori utilizzano quindi sistemi CAN bloccati proprio per impedire agli utenti di modificare il limite di velocità. Ad esempio, i motori Bafang basati su CAN hanno il limite di velocità fisso e non modificabile tramite il display, il che contribuisce a garantire la conformità alle normative fin dall'inizio. Al contrario, su molti sistemi UART, un utente esperto potrebbe accedere alla modalità di impostazione sul display e modificare le dimensioni della ruota o il limite, oppure utilizzare un cavo di programmazione, il che potrebbe infrangere la lettera della legge se fa superare alla bicicletta i 25 km/h di assistenza.
- Sicurezza elettrica: La norma EN 15194 (ultime revisioni) riguarda la sicurezza elettrica di base ma è interessante notare che non copre completamente la sicurezza della batteria - presuppone che il pacco batterie stesso sia conforme ad altri standard. Si concentra maggiormente sull'integrazione, sul cablaggio e sulla protezione di base (come l'assenza di parti sotto tensione, ecc.). Il protocollo di comunicazione non ha un impatto diretto su questo aspetto, ma indirettamente un protocollo come il CAN che consente al BMS di parlare con il controllore può migliorare la sicurezza: ad esempio, il BMS può inviare un comando di "stop alla scarica" se la batteria si surriscalda. Anche se non è richiesto dalla norma EN 15194, questo tipo di funzione aiuta una bicicletta a soddisfare le aspettative generali di sicurezza (evitando eventi di fuga termica).
Inoltre, le biciclette elettriche da carico europee (in particolare quelle che trasportano merci/passeggeri) potrebbero dover soddisfare i requisiti di Direttiva Macchine se non rientrano strettamente nelle regole della bicicletta (alcune biciclette da carico pesanti lo fanno). Anche in questo caso si sottolinea la presenza di robuste protezioni contro i guasti. L'uso di un protocollo di comunicazione solido con un comportamento di sicurezza (come l'arresto del CAN in caso di guasto) può aiutare a garantire la conformità.
Maggiori informazioni su Standard UE per le biciclette elettriche
Come i protocolli di comunicazione influenzano la conformità delle biciclette elettriche negli Stati Uniti
Stati Uniti - UL 2849 e altri: Negli Stati Uniti, la produzione di e-bike è un po' meno regolamentata a livello federale per quanto riguarda le prestazioni (esiste una definizione di prodotto di consumo di e-bike a bassa velocità come 750W max e 20 mph con l'acceleratore/28 mph con la pedalata assistita, ma non esistono standard costruttivi obbligatori a livello federale). Tuttavia, la certificazione di sicurezza sta diventando fondamentalesoprattutto a causa dei problemi di incendio delle batterie.
- UL 2849 è il principale standard di sicurezza per i sistemi elettrici delle e-bike in Nord America. Copre l'intero sistema elettrico di una e-bike, compresi la batteria, il motore, il caricabatterie e tutte le interconnessioni. Il test UL 2849 esamina se il cablaggio è in grado di gestire le correnti, se il sistema è protetto contro i cortocircuiti e, cosa importante, incorpora anche UL 2271 per le batterie (che è uno standard di sicurezza specifico per le batterie). Per quanto riguarda la comunicazione, la UL 2849 non prescrive un protocollo, ma verificherà che, ad esempio, se la comunicazione viene persa o viene rilevato un guasto, il sistema si guasti in modo sicuro (nessun evento termico, nessun motore in fuga). Un sistema basato su CAN potrebbe avere un leggero vantaggio nel dimostrare la ridondanza (ad esempio, se il messaggio di accelerazione viene perso, il CAN può rilevarlo e interrompere la comunicazione in modo appropriato). Ma anche i sistemi UART possono essere progettati per soddisfare la norma UL 2849 (è sufficiente una gestione accurata dei guasti nel firmware del controllore).
- Prevenzione degli incendi e delle scosse elettriche: Norme come la UL 2849 si concentrano sulla prevenzione di incendi e scosse elettriche. Ad esempio, se una e-bike ha un caricabatterie collegato, la comunicazione tra batteria e caricabatterie (se presente) non deve portare a un sovraccarico. In particolare, la Standard EnergyBus Il sistema EnergyBus di cui abbiamo parlato, che è basato su CAN, è stato in parte motivato dalla sicurezza: garantire che qualsiasi caricabatterie possa caricare in modo sicuro qualsiasi batteria comunicando su CANopen e abilitando l'alimentazione solo quando è stato effettuato un handshake appropriato. EnergyBus utilizza un connettore specifico che include linee dati CAN in modo che il caricabatterie e la batteria stabiliscano prima la comunicazione e poi permettano la corrente di carica, per evitare scintille o tensioni non corrispondenti. Questo concetto è in linea con la logica di sicurezza UL. Se un marchio utilizza EnergyBus, probabilmente contribuisce a superare le certificazioni di sicurezza perché gestisce in modo intrinseco le interazioni sicure tra i componenti.
- Conformità alle normative (velocità/potenza): Negli Stati Uniti, il sistema di classi (e-bike di classe 1, 2 e 3) è in gran parte basato sul sistema d'onore e non è applicato in modo così rigoroso come i limiti dell'UE; tuttavia, per motivi di responsabilità, i produttori di solito assicurano che una e-bike venduta come classe 2 non possa essere facilmente modificata per superare le 20 miglia orarie con l'acceleratore, ad esempio. Anche in questo caso, l'utilizzo di un protocollo CAN chiuso può essere utile: gli utenti non possono semplicemente collegare un cavo e deresponsabilizzare la bicicletta. È interessante notare che molte aziende produttrici di biciclette elettriche pubblicizzano batterie o sistemi certificati UL per garantire la sicurezza dei clienti. Ad esempio, HOVSCO (come si legge nella sua knowledge base) sottolinea che le sue biciclette sono conformi alla norma UL 2849 per la sicurezza elettrica e alla norma EN 15194 per la conformità alla sicurezza generale. Ciò significa che il cablaggio, i connettori e le comunicazioni devono funzionare senza causare pericoli.
Standard internazionali e altri standard: Oltre alla EN 15194 e alla UL 2849, esistono altri standard rilevanti, ad esempio, Norma ISO 4210 (standard di sicurezza per le biciclette) con una parte che copre i requisiti per le e-bike, e il tedesco DIN 79010 per le biciclette da carico (che, come abbiamo notato, riguarda aspetti quali la resistenza del telaio sotto carico e le prestazioni di frenata). Questi aspetti non riguardano direttamente l'elettronica, ma uno standard per le biciclette da carico potrebbe implicitamente richiedere che, ad esempio, l'assistenza non si guasti sotto un carico pesante. Una comunicazione robusta garantisce che, anche se la bicicletta è sotto sforzo (e magari il rumore elettrico aumenta o la batteria si affloscia), i segnali tra batteria, controller e sensori rimangano affidabili.
In sintesi, la conformità e la sicurezza guidano alcune decisioni di progettazione tra UART e CAN. Un costruttore che punta alla massima sicurezza potrebbe orientarsi verso il CAN per il controllo e la verifica degli errori, oppure implementare ulteriori salvaguardie sui sistemi UART. Entrambi i protocolli possono far parte di un progetto sicuro, ma il modo in cui vengono utilizzati è fondamentale. Il La natura chiusa dei sistemi CAN può imporre la conformità (ad esempio, limiti di velocità non regolabili dagli utenti, come richiesto dalla legge), mentre I sistemi UART offrono una maggiore libertà all'utente, ma si tratta di un'arma a doppio taglio.. I produttori devono assicurarsi che anche le moto basate su UART abbiano un limitatore fisico o software che non possa essere facilmente violato, per rimanere entro i limiti di legge.
Infine, indipendentemente dal protocollo, l'utilizzo di connettori e cablaggi di qualità è parte della conformità. Nell'UE, la bicicletta deve sopportare le vibrazioni senza che i fili si allentino e in condizioni di bagnato senza che si verifichino cortocircuiti. I connettori come Higo/Julet (connettori impermeabili ampiamente utilizzati nelle biciclette elettriche) sono popolari non solo per la loro praticità, ma anche perché contribuiscono a soddisfare le esigenze dei clienti. Classi di protezione IP e requisiti di affidabilità. Un bus CAN utilizza tipicamente tali connettori (ad esempio, un singolo Higo a 4 o 5 pin può trasportare i dati CAN e l'alimentazione di un display). La scelta del protocollo non cambia la necessità di avere un buon scarico della trazione, isolamento e connettori di bloccaggio per evitare disconnessioni (che potrebbero essere pericolose se, ad esempio, il segnale di disattivazione del freno non raggiungesse il controller a causa di un cavo allentato).
Per concludere questa sezione, sia l'Europa che gli Stati Uniti si sono fortemente concentrati sulla sicurezza delle e-bike. La conformità a standard come EN 15194 e UL 2849 è sempre più irrinunciabile per i marchi affidabili. Il protocollo di comunicazione è un pezzo del puzzle, un mezzo per garantire che il sistema elettrico sia coordinato e a prova di guasto. L'affidabilità del CAN bus può aiutare a soddisfare questi standard fornendo una comunicazione robusta, mentre i sistemi UART richiedono una progettazione accurata per essere altrettanto sicuri. I produttori spesso scelgono il protocollo che meglio si allinea con la strategia di conformità: UART per i progetti più semplici, dove il rischio può essere gestito facilmente, o CAN per i sistemi complessi, dove le sue caratteristiche di sicurezza brillano.
Costi e considerazioni sul mercato nella scelta dei protocolli di comunicazione
Quando si decide tra un protocollo di comunicazione e l'altro (o in generale quando si progetta l'impianto elettrico di una e-bike), il costo è un fattore importante: non solo quello monetario, ma anche il "costo" in termini di flessibilità e di rapporti con i fornitori. Ecco come si confrontano i costi e cosa considerano gli acquirenti o gli ingegneri B2B:
- Costo dell'hardware: Come già detto, un sistema basato su UART utilizza in genere un hardware più semplice. Il controllore e il display devono solo disporre della funzionalità UART, che praticamente tutti i microcontrollori hanno incorporata. Il cablaggio potrebbe essere un po' più semplice (meno considerazioni sulla terminazione, ecc.). Un sistema basato su CAN richiede un po' di più: un chip ricetrasmettitore CAN per ogni dispositivo e possibilmente un MCU più potente (anche se al giorno d'oggi anche MCU piuttosto economici hanno il CAN incorporato). La differenza effettiva nella distinta base (Bill of Materials) potrebbe essere dell'ordine di pochi dollari per bicicletta in volumi elevati, ma in un mercato competitivo è comunque importante. Per un ordine di una grande flotta di biciclette, quei dollari si moltiplicano. Detto questo, la il costo dell'hardware CAN è diminuito e il compromesso potrebbe essere facilmente giustificato dalle funzionalità aggiuntive che CAN fornisce.
- Costo di sviluppo e integrazione: Per una startup di e-bike o una piccola azienda, sviluppare un sistema basato su CAN da zero potrebbe essere costoso se non si dispone di competenze interne. Potrebbe essere necessario assumere ingegneri di sistemi embedded che abbiano familiarità con il CAN, investire in strumenti e dedicare tempo allo sviluppo di un firmware personalizzato. In alternativa, se acquistano un sistema già pronto (come le unità di trasmissione Bosch o Shimano, che sono basate su CAN), il costo di sviluppo da parte loro è inferiore, ma il costo unitario è superiore (i sistemi Bosch hanno un prezzo superiore, in parte perché si ottiene una soluzione completamente integrata e il nome del marchio). A Il sistema UART può spesso essere assemblato utilizzando componenti già pronti per l'uso. con compatibilità nota: ad esempio, molte aziende utilizzano protocolli open-source o standard, dove gran parte dell'ingegneria è già stata fatta e il rischio è minore. Per un acquirente B2B (ad esempio un'azienda che vuole un gruppo di biciclette elettriche con il proprio marchio), scegliere l'UART potrebbe significare poter acquistare parti generiche più economiche, mentre scegliere il CAN spesso significa allinearsi all'ecosistema di un particolare fornitore (che potrebbe richiedere licenze o prezzi più alti).
- Costi post-vendita e di manutenzione: Questo aspetto viene talvolta trascurato. Un operatore di flotta (come un bike sharing o un'azienda di consegne) potrebbe scoprire che Le biciclette con bus CAN consentono di risparmiare sulla manutenzione. Perché? Perché possono diagnosticare i problemi a distanza o più rapidamente. Un sistema collegato al CAN può riportare i codici di errore in modo dettagliato (ad esempio, "guasto al sensore di temperatura della batteria #2" come codice specifico). I tecnici possono collegare gli strumenti diagnostici al bus CAN per individuare i problemi. Questo può ridurre i tempi di lavoro. Inoltre, come si è visto nel caso di IoT Venture, è possibile effettuare aggiornamenti remoti del firmware, risparmiando così il costo del richiamo fisico delle biciclette per alcune riparazioni. D'altra parte, la manutenzione iniziale di una bicicletta UART potrebbe essere più semplice (meno cose che possono andare storte nelle comunicazioni, forse), ma se qualcosa non va, si potrebbe essere costretti a sostituire i pezzi per tentativi ed errori, dato che il sistema non è in grado di dire esattamente cosa c'è che non va, a parte forse il lampeggiare di un LED. Per un singolo consumatore, una bicicletta UART potrebbe essere più economica da riparare, perché può utilizzare parti non disponibili e le conoscenze della comunità per ripararla, mentre una bicicletta CAN potrebbe costringerlo a rivolgersi a un servizio di assistenza autorizzato (potenzialmente più costoso). C'è quindi un compromesso di costi tra facilità di manutenzione da parte dell'utente (vittorie UART) e supporto diagnostico avanzato (CAN vince, il che potrebbe ridurre i costi dei servizi professionali).
- Costi di licenza e proprietà: L'uso di un protocollo CAN proprietario potrebbe comportare costi di licenza o restrizioni. Se un marchio di biciclette sviluppa un proprio protocollo CAN, va bene, ma se utilizza qualcosa come CANopen o EnergyBus, potrebbe essere necessario aderire agli standard ed eventualmente ad associazioni (ad esempio, EnergyBus e.V.). Questi costi sono generalmente modesti, ma vale la pena di notarli. I sistemi proprietari come quello di Bosch significano che i produttori di biciclette acquistano le unità di azionamento come un pacchetto; Bosch stabilisce il prezzo. Con i sistemi UART, c'è spesso una maggiore concorrenza tra i fornitori di componenti, che può far scendere i prezzi.
- Percezione e valore del cliente: Dal punto di vista del marketing, un marchio potrebbe giustificare un prezzo più alto per una bicicletta dotata di "elettronica CAN bus di livello automobilistico", in quanto sembra avanzata e affidabile (anche se il cliente non vede direttamente la differenza). C'è un valore nel sensazione e prestazioni premium che i sistemi CAN spesso accompagnano (di solito sono montati su moto che hanno anche motori di alta qualità, ecc.) Quindi, i marchi che si rivolgono al mercato di fascia alta o ai clienti commerciali possono sfruttare il CAN come parte di un'offerta premium. Al contrario, per le biciclette elettriche entry-level, ai clienti interessa soprattutto che funzionino e che siano accessibili: non pagheranno un extra solo perché il display della bicicletta utilizza il CAN invece dell'UART. Quindi, la scelta del protocollo deve essere in linea con il segmento di mercato della bicicletta.
- A prova di futuro: Un costo che gli ingegneri considerano è il costo opportunità di non essere a prova di futuro. Se si investe ora in una piattaforma basata su UART, ma l'anno prossimo si vogliono aggiungere altre funzioni (ad esempio una seconda batteria o un nuovo tipo di sensore), la vecchia piattaforma potrebbe risultare limitante e costringere a una riprogettazione. Alcune aziende decidono che, a lungo termine, è più conveniente optare per il CAN fin dall'inizio, anche se non utilizzato appieno, per lasciare spazio a nuove funzioni e accessori. In questo modo si possono risparmiare i costi di riqualificazione in futuro. Si tratta di una decisione strategica: pagare un po' di più in anticipo rispetto a un costo potenzialmente molto più alto in seguito per l'aggiornamento.
In termini di prezzi effettivi: è difficile stabilirlo, ma un esperto del settore potrebbe dire, ad esempio, che un set di base di controller UART per biciclette elettriche e display potrebbe costare, all'ingrosso, $50-$100, mentre un set equivalente basato su CAN di una grande marca potrebbe costare qualche centinaio di dollari (perché è più sofisticato). Tuttavia, questa differenza spesso include anche migliori prestazioni del motore, garanzia e così via, non solo la differenza di comunicazione. Il costo incrementale solo per il protocollo (ad esempio, l'aggiunta di un chip CAN) è piccolo, ma la costo dell'ecosistema (legarsi a un sistema costoso rispetto a uno generico a basso costo) può essere grande.
Per dirla in parole povere per un acquirente di e-bike B2B:
- Se la vostra priorità è costo unitario più basso e si vuole la flessibilità di approvvigionarsi da più fornitori, un Sistema aperto basato su UART è interessante. È possibile acquistare display e controller che si abbinino tra loro, eventualmente anche negoziando con più fabbriche.
- Se la vostra priorità è prestazioni, affidabilità e un sistema "chiavi in mano". (e siete disposti a pagare per questo), una Sistema basato su CAN di un fornitore affidabile potrebbe farvi risparmiare grattacapi e aggiungere valore al vostro prodotto (a un costo maggiore, che si spera possiate recuperare con un prezzo più alto delle vostre biciclette o con l'efficienza dei volumi).
Limiti e tendenze future
Anche se si esaltano le virtù dell'UART e del CAN, vale la pena di notare la i limiti dello stato attuale della comunicazione sulle e-bike e dove potrebbero andare le cose:
- Mancanza di standardizzazione a livello industriale: A differenza del mondo automobilistico, dove quasi tutte le auto utilizzano il CAN bus e la diagnostica standardizzata (OBD-II), il settore delle biciclette elettriche è ancora frammentato. Esiste non esiste un unico protocollo universale che tutte le biciclette elettriche utilizzano. Le implementazioni UART variano (ogni produttore può avere diversi formati di dati su UART) e le implementazioni CAN sono spesso proprietarie. Questa è una limitazione per i consumatori e gli assemblatori di biciclette: non è "plug and play" tra marche diverse. Non si può prendere un display a caso e aspettarsi che funzioni con un controller a caso, a meno che non utilizzino esplicitamente lo stesso protocollo e lo stesso firmware. EnergyBus è un promettente sforzo di standardizzazione (con CANopen CiA-454 che definisce i messaggi per i componenti delle e-bike), ma non è ancora pervasivo. Se EnergyBus o standard simili si affermassero, potremmo vedere componenti realmente interoperabili - ad esempio, una batteria del produttore X potrebbe essere utilizzata con un sistema motore del produttore Y, con il protocollo basato su CANopen che garantisce la comprensione reciproca. Ciò andrebbe a vantaggio degli acquirenti B2B (più opzioni per i fornitori) e dei consumatori (più opzioni di aggiornamento/riparazione). Tuttavia, gli operatori del settore hanno anche motivazioni commerciali per mantenere sistemi proprietari (per assicurarsi i clienti). La tensione tra standardizzazione vs. controllo proprietario darà forma al futuro dei protocolli per le biciclette elettriche.
- Esigenze di larghezza di banda e di dati: Attualmente, le comunicazioni delle biciclette elettriche sono a basso contenuto di dati. Ma le biciclette elettriche del futuro potrebbero trasmettere un maggior numero di informazioni: immaginate di raccogliere dati ad alta frequenza dai sensori di coppia, o metriche di potenza ad alta risoluzione per scopi di allenamento, o ancora video da telecamere per la sicurezza. Il CAN a velocità classiche potrebbe diventare un collo di bottiglia se si devono inviare molti dati. L'industria automobilistica dispone di CAN-FD (una versione estesa di CAN con frame di dati più grandi e un throughput più elevato) e di altri protocolli come Ethernet per esigenze di larghezza di banda elevata. Per le biciclette elettriche, il CAN-FD potrebbe eventualmente comparire se necessario, oppure il BLE/Wi-Fi per scaricare i registri dei dati. Comunicazione wireless potrebbe anche integrare i protocolli cablati: già molte biciclette elettriche utilizzano il Bluetooth Low Energy per collegare la bicicletta a un'applicazione per smartphone. Questo non rientra nell'ambito dell'impianto elettrico interno, ma vale la pena di tenerlo presente come canale parallelo. In futuro, forse, alcune biciclette elettriche più semplici potrebbero addirittura rinunciare a un display cablato e utilizzare un modulo wireless per il telefono, anche se i controlli critici (come i segnali dell'acceleratore o del freno) rimarrebbero probabilmente cablati per garantire l'affidabilità. Nelle flotte di trasporto merci, si potrebbe assistere a una maggiore integrazione della comunicazione V2X (vehicle-to-everything), con le biciclette elettriche che dialogano con i sistemi logistici o con l'infrastruttura del traffico, anche in questo caso sovrapponendosi al sistema CAN bus di base.
- Problemi di sicurezza: Man mano che le biciclette elettriche si connettono e utilizzano comunicazioni più complesse, sicurezza informatica diventa un problema. Un sistema UART privo di connettività esterna è praticamente immune da hacking (qualcuno dovrebbe fisicamente toccare i fili). Ma un bus CAN che si interfaccia con un modulo Bluetooth o un modulo GSM (per la localizzazione delle flotte) introduce potenziali vulnerabilità. I produttori dovranno assicurarsi che i loro protocolli (in particolare le interfacce wireless con il bus) siano sicuri per impedire il controllo da parte di malintenzionati (immaginate un hackeraggio IoT che potrebbe disattivare una flotta di biciclette per le consegne a distanza - uno scenario inverosimile ma teoricamente possibile se non protetto). I protocolli proprietari, per loro natura, sono in qualche modo sicuri attraverso l'oscurità, ma man mano che il CAN diventa di dominio comune nelle biciclette elettriche, i malintenzionati potrebbero tentare di iniettare messaggi CAN attraverso una porta esposta. Pertanto, in futuro potremmo assistere a una maggiore crittografia o autenticazione nelle comunicazioni delle biciclette elettriche.
- Esperienza utente: In definitiva, qualunque sia il protocollo utilizzato, deve garantire una buona esperienza all'utente. Ai motociclisti interessano aspetti come l'erogazione fluida della potenza, l'accuratezza delle informazioni sul display e il funzionamento delle funzioni di sicurezza quando necessario. Una limitazione dei primi sistemi basati su CAN era che a volte erano anche Gli utenti si sentivano frustrati per l'impossibilità di modificare semplici preferenze. Con la maturità dei sistemi, i produttori potrebbero trovare il modo di offrire agli utenti una certa flessibilità (tramite applicazioni o impostazioni autorizzate) senza compromettere il controllo. Ad esempio, forse un'app potrebbe consentire una messa a punto limitata (entro limiti di sicurezza) anche su un sistema CAN, oppure permettere ad accessori di terze parti certificati di comunicare sul bus (magari utilizzando i messaggi standard EnergyBus). Possiamo aspettarci un po' più di apertura man mano che i protocolli si standardizzano, ironicamente anche in un mondo CAN.
In chiusura, il Il sistema di comunicazione elettrica delle biciclette elettriche - UART o CAN - è fondamentale per le prestazioni, la sicurezza e la modularità della bicicletta.. Gli ingegneri che progettano biciclette elettriche devono bilanciare la semplicità dell'UART con la sofisticazione del CAN. Gli acquirenti B2B devono considerare come la scelta influisca sui costi, sulla catena di fornitura e sulla proposta di valore del loro prodotto. L'industria sembra orientarsi verso il bus CAN man mano che le biciclette elettriche si evolvono in macchine più connesse e capaci, ma i sistemi basati su UART rimarranno probabilmente in parallelo per i modelli più semplici e a basso costo per un certo periodo di tempo (dopo tutto, sono "abbastanza buoni" per un enorme segmento di ciclisti).
La comprensione di questi protocolli di comunicazione - essenzialmente il linguaggio elettrico delle biciclette elettriche, si comprende molto meglio il funzionamento interno di una bicicletta elettrica. Dalla rotazione dell'acceleratore o dalla pressione sul pedale, all'impulso del motore e ai numeri sul display, tutto è reso possibile da bit e byte che scorrono lungo i fili, assicurando che la batteria, il motore e il pilota sono sincronizzati. E sia che si tratti di un'elegante e-bike da città o di un mezzo pesante per il trasporto di merci, questa armonia è ciò che fa sentire il viaggio senza sforzo e sicuro. Alla fine, l'obiettivo di qualsiasi protocollo è far sì che la tecnologia passi in secondo piano, in modo che i ciclisti possano semplicemente godersi il viaggio - ma ora, si spera, con un po' di comprensione dell'impressionante coordinamento elettronico che avviene sotto i loro piedi.
Fonti:
- Guida alle biciclette elettriche Qiolor - "Come scegliere un display compatibile per il controller Ebike". (2025) - discutere i linguaggi UART e CANBUS e l'importanza della corrispondenza dei protocolli.
- Velco.tech - "CAN vs UART: differenze tra le modalità di comunicazione". (2024) - spiegare la semplicità dell'UART rispetto alle capacità di rete del CAN ed elencare i loro vantaggi/limitazioni.
- Centro di assistenza Biktrix - "Che cosa sono i protocolli CANBUS e UART?". - una visione centrata sull'utente su come il CAN blocca le impostazioni (limite di velocità fisso) rispetto all'UART che consente modifiche, oltre a un confronto sull'intercambiabilità dei display.
- IoT Venture (caso di studio con la flotta CYCLE) - descrive i vantaggi dell'integrazione CAN nelle flotte di biciclette elettriche: accesso ai dati di manutenzione, disattivazione remota del motore, aggiornamenti OTA.
- Conoscenza HOVSCO - "Quali caratteristiche di sicurezza hanno le biciclette elettriche?". - note sulla norma EN 15194 (UE) che garantisce limiti di velocità/potenza e durata, e sulla norma UL 2849 (USA) che si concentra sulla sicurezza elettrica/antincendio, oltre a menzionare la norma DIN 79010 per la sicurezza delle biciclette da carico.
- App Note di Texas Instruments - "Considerazioni sulla progettazione hardware di una bicicletta elettrica con motore BLDC". - ha fornito gli schemi a blocchi di un tipico sistema di e-bike e una visione dell'elettronica di controllo.
- Conoscenza della bicicletta Letrigo - "Spiegazione del cablaggio del display delle biciclette elettriche". - dettagli sul cablaggio, sui connettori (Higo/Julet) e avverte che non esiste uno standard di cablaggio universale, sottolineando la corretta corrispondenza delle connessioni e un cablaggio robusto per l'integrità del segnale.
- Standard EnergyBus - Introduzione di Kvaser - che descrive EnergyBus come uno standard aperto basato su CANopen per i componenti LEV, per garantire la compatibilità e la sicurezza tra i vari produttori.




