
Elektrische fietsen (e-bikes), inclusief e-bikes voor vrachtvervoer, zijn afhankelijk van een ingewikkeld elektrisch systeem dat de accu, motor, controller, sensoren en gebruikersinterface met elkaar verbindt. De communicatieprotocollen van dit systeem dienen als de "taal" die ervoor zorgt dat al deze onderdelen naadloos op elkaar aansluiten. In dit populair-wetenschappelijke overzicht leggen we uit wat deze communicatieprotocollen zijn en hoe ze functioneren binnen elektrische systemen voor e-bikes. We behandelen de soorten protocollen die worden gebruikt, hoe ze verschillen, waar ze worden toegepast, hun voor- en nadelen, kostenoverwegingen, naleving van veiligheidsnormen in de EU en de VS en beperkingen. Het doel is om een duidelijke, gezaghebbende gids te bieden aan onze klanten en het publiek, met een balans tussen technische diepgang en praktisch begrip.
Essentiële onderdelen van een e-bike - het "zenuwstelsel".
Bij e-bikes kun je denken aan een centraal zenuwstelsel van draden en gegevensverbindingen die alle cruciale onderdelen met elkaar verbinden. Net zoals zenuwen signalen overbrengen in een lichaam, brengt de kabelboom zowel voedings- als gegevenssignalen over op de fiets . De belangrijkste onderdelen van een typisch elektrisch systeem voor e-bikes zijn:

- Batterij: De gelijkstroombron (meestal 36-48 V) die energie levert aan het systeem. Hij is via dikke voedingskabels (met zekeringen of stroomonderbrekers voor de veiligheid) verbonden met de controller om de hoofdstroom te leveren. Sommige geavanceerde accu's hebben ook een datalink (via communicatielijnen) om status- of besturingssignalen te delen met de controller.
- Motor en controller: De motor (naafmotor in een wiel of een middenaandrijving aan de crank) ontvangt vermogen van de motorcontroller, die het "brein" is dat de motoroutput regelt op basis van de input van de rijder en feedback van sensoren. De controller is een elektronische eenheid met een microprocessor die signalen opvangt (gaspedaal, pedaalsensor, remmen, enz.) en de stroom naar de motor regelt. Motoren hebben meestal fasedraden (zware kabels die vermogen overbrengen) en sensordraden (dunne kabels van Hall-effectsensoren die feedback geven over de rotorpositie) die naar de controller gaan.
- Menselijke interface (gashendel, pedaalsensor, display): De berijder communiceert met de e-bike via apparaten zoals de gashendel (vaak een handgreep met een Hall-effectsensor die een variabel spanningssignaal afgeeft om snelheid aan te vragen) en de trapbekrachtigingssensor (PAS) die de trapbeweging detecteert via magneten en sensoren. Het display op het stuur toont de snelheid, het batterijniveau, het ondersteuningsniveau, enz. en bevat vaak knoppen waarmee de rijder de instellingen kan aanpassen. Het display en de controller wisselen gegevens uit via een meeraderige kabel met voedings- en communicatielijnen.
- Veiligheidsschakelaars (remhendels): E-bike remhendels hebben meestal uitschakelaars die een signaal naar de controller sturen om het motorvermogen onmiddellijk af te sluiten wanneer er geremd wordt. Meestal wordt hiervoor een eenvoudig tweedraadscircuit gebruikt dat fungeert als een aan/uit-signaal naar de controller .
- Verlichting en accessoires: Veel e-bikes integreren ook voor- en achterverlichting, claxon, USB-laders, enz. Deze kunnen worden bestuurd door de hoofdcontroller of werken op aparte circuits, maar in high-end systemen kunnen ze ook worden aangesproken via de communicatiebus.
Voor een gedetailleerde gids met accessoires voor ebikes en bakfietsen kun je lees dit artikel voor een uitgebreider antwoord of bekijk onze Cargo Bike 101 pagina.
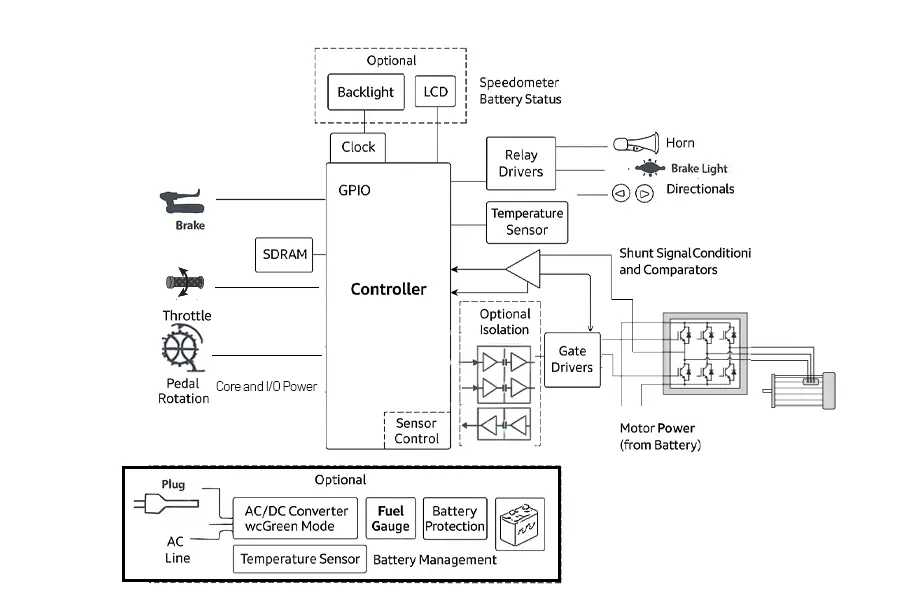
Afbeelding 2: Blokschema van een typisch besturings- en batterijbeheersysteem voor elektrische fietsen. De centrale controller interfacet met de belangrijkste ingangen - gaspedaal, pedaalsensoren, remhendels - en beheert uitgangen zoals motoraandrijfsignalen via poortdrivers, relaisdrivers en GPIO-aansluitingen. Optionele modules zoals LCD-schermen, acculaders, brandstofmeters en achtergrondverlichting breiden de functionaliteit van het systeem uit. Communicatie tussen componenten ondersteunt real-time coördinatie van motorvermogen, verlichting, veiligheidsuitschakelingen en batterijstatusbewaking.
Wat zijn E-bike communicatieprotocollen?
In de context van e-bikes verwijzen communicatieprotocollen naar de methode en het formaat waarmee elektronische onderdelen gegevens uitwisselen. Vroege of basis e-bikes hadden vaak geen complex digitaal netwerk - veel signalen waren analoog of eenvoudige aan/uit-schakelingen. Een gashendel zendt bijvoorbeeld een analoge spanning uit om aan te geven hoeveel vermogen de berijder wil, en een remschakelaar opent of sluit eenvoudigweg een circuit om de stroom te onderbreken. Maar naarmate e-bikes geavanceerder werden - met slimme displays, geavanceerde sensoren en zelfs GPS- of smartphone-integratie - ontstond de behoefte aan robuustere digitale communicatie.
Vandaag de dag domineren twee primaire digitale communicatieprotocollen e-bikesystemen:
- UART (Universele Asynchrone Ontvanger-Zender): Een seriële communicatiemethode die een directe één-op-één gegevensverbinding creëert tussen twee apparaten (meestal de controller en het beeldscherm).
- CAN-bus (Controller Area Network): Een netwerkprotocol waarmee meerdere apparaten (controller, display, batterij BMS, sensoren, etc.) allemaal kunnen communiceren via dezelfde gedeelde busdraden.
Naast UART en CAN Bus worden er af en toe nog twee andere communicatieprotocollen gebruikt in e-bikesystemen:
- SIF (Serial Interface Format): Dit is een propriëtair of vereenvoudigd protocol dat vaak wordt aangetroffen in bepaalde merksystemen (bijv. Shimano STEPS of oudere display-units). Het wordt meestal gebruikt voor basisgegevensuitwisseling tussen de controller en het display of de knoppen op afstand. Omdat SIF geen open standaardisatie en flexibiliteit heeft, is het meestal beperkt tot specifieke merken of oudere modellen.
- RS-485 (aanbevolen standaard 485): RS-485 is een industrieel serieel communicatieprotocol dat bekend staat om zijn betrouwbaarheid over lange afstanden en ruisbestendigheid. Hoewel het niet zo gebruikelijk is als UART of CAN in e-bikes voor consumenten, komt het wel voor in sommige hoogwaardige of commerciële vlootsystemenVooral wanneer robuustheid en uitgebreide bedrading vereist zijn, zoals bij gedeelde fietsen, huurvloten of zware e-bikes.
Deze protocollen zijn in wezen de "talen" van de elektronica van de e-bike. Als alle onderdelen dezelfde taal spreken, stroomt de informatie correct; zo niet, dan begrijpen de apparaten elkaar niet. Daarom is het afstemmen van het protocol van cruciaal belang bij het koppelen van bijvoorbeeld een display aan een controller. Zelfs als de stekker past, betekent incompatibiliteit in het protocol dat de onderdelen niet samenwerken.
Overzicht van het marktgebruik (geschatte trends 2024-2025)
Hoewel er geen algemeen gepubliceerde uitsplitsing is van het protocolgebruik in de e-bike markt, gebaseerd op inzichten uit de industrie en de belangrijkste systeemleveranciers (bijv. Bosch, Bafang, Shimano, Mahle, etc.), is het volgende een overzicht redelijke geschatte verdeling vanaf 2025:
| Protocol | Gebruiksaandeel (geschat) | Algemene toepassingen | Notities |
|---|---|---|---|
| UART | ~50-60% | E-bikes van instapniveau tot middenklasse | Op grote schaal gebruikt vanwege de eenvoud en lage kosten |
| CAN-bus | ~30-35% | Hoogwaardige, slimme of modulaire e-bikes | Verhoog adoptie met slimme integratie |
| RS-485 | ~5-10% | Wagenparksystemen, commerciële langdraadsystemen | Beperkt tot specifieke gebruikssituaties |
| SIF / Eigendomsrecht | <5% | Merkspecifieke of legacysystemen | Meestal gevonden in oudere of afgesloten ecosystemen |
Opmerking: Deze cijfers zijn gegeneraliseerd over wereldwijde markten (EU, CN, NA) en zijn gebaseerd op OEM-trends, openbare documentatie, teardown-gegevens en inzichten van componentenleveranciers.
E-bike communicatieprotocollen op eenvoudigere manier definiëren:.
Eenvoudig gezegd zijn de communicatieprotocollen in e-bikes als volgt talen of regels die verschillende elektronische onderdelen met elkaar laten praten. Als de componenten niet dezelfde taal spreken, kunnen ze elkaar niet begrijpen, zelfs als de stekker fysiek in het stopcontact past.
Analogie: Eén-op-één gesprek vs. groepschat
Laten we ons twee manieren van communicatie in het dagelijks leven voorstellen om de protocollen voor e-bikes te begrijpen:
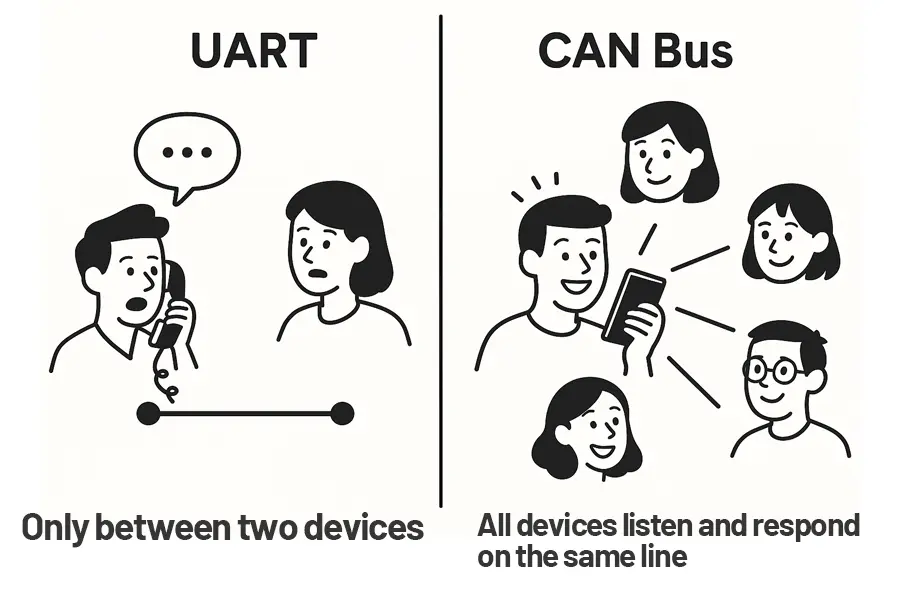
UART: als een één-op-één telefoongesprek
- UART (Universal Asynchronous Receiver-Transmitter) is als het bellen van een vriend aan de telefoon.
- Alleen twee apparaten tegelijk kunnen praten, zoals je beeldscherm en je controller.
- Als je met een ander apparaat wilt praten, moet je een andere draad (of een ander telefoontje).
- Het is eenvoudig, maar niet schaalbaar als je veel apparaten hebt.
- Veel voorkomend in basis e-bike systemen met beperkte functies.
AN Bus: Als een groepschat
- CAN-bus (Controller Area Network) is als een groepschat op WhatsApp of WeChat.
- Alle apparaten (controller, batterij, display, sensor, verlichting) in dezelfde chatroom.
- Elk bericht wordt getagd met een afzender-ID en elk apparaat leest alleen de berichten die voor hem bedoeld zijn.
- Het is veel efficiënter en ideaal als er veel componenten zijn die moeten samenwerken.
- Gebruikt in slimme, geavanceerde e-bike systemenVaak met GPS, Bluetooth en app-integratie.
| Functie | UART (telefoongesprek) | CAN Bus (Groepsgesprek) |
|---|---|---|
| Type aansluiting | Eén-op-één (punt-naar-punt) | Een-op-veel (gedeelde bus) |
| Schaalbaarheid | Laag - heeft extra draden nodig voor meer apparaten | Hoog - meerdere apparaten delen dezelfde draden |
| Communicatiestroom | Alleen tussen twee apparaten | Alle apparaten luisteren en reageren op dezelfde lijn |
| Complexiteit | Eenvoudig | Complexer maar krachtiger |
| Gebruiksscenario | Basis e-bikes (alleen display ↔ controller) | Slimme e-bikes met BMS, app, sensoren, enz. |
De rol van communicatieprotocollen
Communicatieprotocollen in e-bikes dienen verschillende belangrijke doelen:
- Gegevens delen: Hiermee kan de controller real-time gegevens naar het display sturen (snelheid, laadstatus van de accu, foutcodes) en opdrachten terug ontvangen (bijv. ondersteuningsniveau wijzigen, verlichting aan/uit). Zonder een goed protocol is het mogelijk dat je geen betrouwbare snelheidsmeting krijgt of dat je de instellingen niet kunt aanpassen.
- Coördinatie van componenten: In geavanceerde systemen moeten meerdere microcontrollers samenwerken. Een slimme batterij met een eigen batterijbeheersysteem (BMS) kan bijvoorbeeld communiceren met de motorbesturing om overstroom te voorkomen of om het exacte batterijpercentage weer te geven. Met een CAN-bus of vergelijkbaar netwerk kunnen de batterij, motorcontroller, display en zelfs sensoren allemaal informatie delen in een netwerk met meerdere knooppunten.
- Veiligheid en betrouwbaarheid: Een goed ontworpen protocol zorgt ervoor dat als er een fout optreedt of het signaal wegvalt (bijvoorbeeld als er een kabel beschadigd is), het systeem dit kan detecteren en een veilige actie kan ondernemen (zoals het uitschakelen van de motor). Robuuste protocollen zoals CAN bevatten foutcontrole en berichtprioritering om hiermee om te gaan. Eenvoudiger analoge signalen hebben een dergelijke foutafhandeling niet - als een gaskabel losraakt, kan de controller ruis verkeerd interpreteren als een gasklepsignaal, tenzij er veiligheidsvoorzieningen aanwezig zijn.
- Uitbreidbaarheid: Voor e-bikes met veel functies (GPS-trackers, startonderbrekers tegen diefstal, meerdere ondersteuningssensoren, etc.) maakt een communicatienetwerk het makkelijker om apparaten toe te voegen of te verwijderen. In plaats van dat elk nieuw apparaat een eigen bedradingsverbinding met de controller nodig heeft, kan een apparaat zich aansluiten op de gemeenschappelijke bus en gegevens delen met alle andere apparaten. Deze schaalbaarheid is een belangrijke reden waarom moderne high-end e-bikes overstappen op CAN-bus.
Samengevat is het communicatieprotocol de ruggengraat van het elektrische systeem van de e-bike en zorgt het ervoor dat alle elektronische onderdelen samenwerken. In een volgende post duiken we in de twee hoofdprotocollen (UART en CAN), onderzoeken we hoe elk protocol werkt en wat hun respectievelijke toepassingen zijn bij e-bikes en e-bikes voor vrachtvervoer. kijk of je geïnteresseerd bent:
- "UART in E-bikes begrijpen: Hoe eenvoudige seriële communicatie uw fiets aandrijft".
- Een beginnersvriendelijke gids over hoe UART basisgegevensuitwisseling mogelijk maakt tussen e-bike onderdelen zoals displays en controllers.
- "Wat is CAN Bus in elektrische fietsen? Een slimmere manier om accu's, sensoren en meer aan te sluiten".
- Leer hoe moderne e-bikes CAN Bus gebruiken om communicatie met meerdere apparaten, geavanceerde displays en systeemdiagnose te ondersteunen.
Toepassingsscenario's: Welk communicatieprotocol voor welke E-bike?
Het is nuttig om te begrijpen hoe UART en CAN in de praktijk worden gekozen voor verschillende e-bike ontwerpen. We zullen twee brede categorieën bekijken: e-bikes voor consumenten (inclusief gewone fietsen voor woon-werkverkeer of vrijetijdsfietsen) En cargo/fleet e-bikes (vaak gebruikt voor zakelijke leveringen of door huurvloten)waarbij wordt opgemerkt dat deze vaak verschillende prioriteiten hebben.

- Standaard e-bikes voor consumenten (City, Mountain, Road e-bikes): Dit zijn de fietsen die veel particulieren kopen voor persoonlijk gebruik. Ze variëren van instapmodel tot zeer duur. In het lagere segment (kostengevoelige modellen) is UART-communicatie heel gebruikelijk. Bijvoorbeeld, een eenvoudige 36V e-bike voor woon-werkverkeer met een trapfrequentiesensor en een eenvoudig LED-scherm gebruikt waarschijnlijk een UART (of zelfs analoge signalen) tussen de controller en het minimale display dat het heeft. De focus ligt hier op kosteneffectiviteit en basisfunctionaliteit. Veel van dergelijke fietsen gebruiken algemeen verkrijgbare controllers en displays die voldoen aan een de facto UART-protocol, wat betekent dat fietsmerken componenten van verschillende OEM's kunnen betrekken. Dit is aantrekkelijk voor B2B-kopers die de flexibiliteit willen om bijvoorbeeld een mooier display van verkoper A te gebruiken met een controller van verkoper B - zolang beide UART in hetzelfde formaat spreken, kan het werken (hoewel de compatibiliteit van pinouts en firmware moet worden gecontroleerd). Bij de duurdere consumentenfietsen, vooral die van grote merken, is er een trend naar CAN-bus. High-performance e-MTB's of e-road fietsen met koppelsensoren en mooie displays gebruiken CAN om alles soepel te integreren. Sommige merken gebruiken echter nog steeds UART of andere eigen seriële verbindingen, zelfs in high-end fietsen; het verschilt per fabrikant en hun ontwerpfilosofie.

- E-bikes voor vrachtvervoer en commerciële wagenparken: Vracht e-bikes zijn ontworpen om zware ladingen of passagiers te vervoeren en worden vaak gebruikt door bedrijven (bezorgdiensten, postfietsen, enz.). Deze fietsen hebben de neiging om prioriteit te geven aan robuustheid, veiligheid en mogelijkheden voor vlootbeheer over de kosten van elektronica. In dit segment heeft de CAN-bus echt terrein gewonnen. Vrachtfietsen kunnen bijvoorbeeld dubbele batterijen om de actieradius te vergroten - voor het beheren van twee accu's is communicatie nodig om de ontlading te balanceren of in ieder geval om de status van elke accu te rapporteren. CAN maakt het eenvoudiger voor één controller om te communiceren met twee BMS-units (één in elke accu) op dezelfde bus. Vrachtfietsen kunnen ook extra accessoires hebben: remlichten, richtingaanwijzers, zelfs elektronische sloten - het coördineren hiervan via een centrale bus vereenvoudigt de bedrading en besturing. Omdat e-bikes voor vrachtvervoer vaak in wagenparken worden gebruikt, hebben bedrijven graag telematica erop: GPS-trackers die de locatie, het gebruik en eventuele storingen van de motor kunnen rapporteren. Met een systeem dat CAN ondersteunt, kan een telematicamodule eenvoudigweg de CAN-berichten voor snelheid, batterijstatus, enz. afluisteren en die informatie uploaden. Een casestudy met een Europese bezorgvloot toonde aan dat het afluisteren van de CAN-bus het mogelijk maakte om onderhoudsgegevens (zoals kilometerstand) op afstand te controleren, de motor op afstand uit te schakelen voor diefstalpreventie en de firmware van de motor over-the-air bij te werken - functies die zeer nuttig zijn voor het wagenparkbeheer. Dit zou lastig te implementeren zijn op een UART-gebaseerde fiets.
- Mix-and-Match vs. Geïntegreerde Systemen: Als een e-bikemerk de vrijheid wil hebben om componenten te mixen of aftermarket upgrades toe te staan, houden ze het meestal bij UART-gebaseerde systemen. We zagen dat UART-systemen maken het mogelijk om displays te verwisselen of motorinstellingen te wijzigen.. Een kleiner e-bike bedrijf zou de voorkeur kunnen geven aan deze route om niet vast te zitten aan één leverancier - ze kunnen van motor/controller-leverancier veranderen zonder het hele ecosysteem te veranderen, zolang het protocol UART blijft en ze de firmware kunnen aanpassen. Aan de andere kant, merken die gericht zijn op systeemoptimalisatie en compliance kiezen vaak voor CAN. Bosch e-bikes gebruiken bijvoorbeeld een CAN-achtige bus (Bosch heeft een eigen CAN-gebaseerd protocol) die de motor, het display en de accu verbindt. Dit zorgt ervoor dat onderdelen van derden niet kunnen storen; alles is nauwkeurig op elkaar afgestemd. Het voordeel is de uitstekende betrouwbaarheid en veiligheid - het systeem geeft een foutmelding als er iets niet in orde is. Het nadeel is dat je je als B2B-koper (zoals een OEM-fietser die voor Bosch kiest) verplicht om de motor, controller, accu en display te kopen. alle van Bosch als pakket.
- Bakfietsen - specifieke overwegingen: Vrachtfietsen worden, vooral in de EU, vaak strenger gecontroleerd omdat ze zwaardere ladingen of zelfs passagiers kunnen vervoeren. In Duitsland is er bijvoorbeeld een norm (DIN 79010) speciaal voor de veiligheid van bakfietsen (vooral mechanische aspecten zoals de sterkte van het frame en remmen). Hoewel die norm geen communicatieprotocollen voorschrijft, is de veiligheid voor alles in bakfietsen moedigt het gebruik van een protocol aan dat er bijvoorbeeld voor kan zorgen dat als er iets fout gaat (oververhitte motor of bijna lege accu), het systeem dit kan communiceren en actie kan ondernemen. De robuustheid en foutafhandeling van CAN helpen om aan deze veiligheidsdoelstellingen te voldoen. Bovendien werken e-bikes voor vrachtvervoer vaak in stedelijke omgevingen (bezorging in steden) waar veel radio/elektrische ruis is en de inzet hoog is als er op het verkeerde moment een communicatiefout optreedt. De ongevoeligheid voor ruis van CAN is hier een groot pluspunt, omdat het miscommunicatie voorkomt die kan leiden tot grillig gedrag.


Veiligheidsnormen en conformiteit van elektrisch systeem (EU/US)
Ongeacht het gebruikte communicatieprotocol moeten elektrische systemen van e-bikes voldoen aan veiligheidsnormen om ervoor te zorgen dat ze veilig en legaal werken, vooral in belangrijke markten zoals Europa en de Verenigde Staten. Het communicatieprotocol kan indirect van invloed zijn op de conformiteit van een fiets - zo kan een protocol dat onbeperkte gebruikersaanpassingen toestaat een risico vormen voor de conformiteit, terwijl een protocol dat is vergrendeld ervoor kan zorgen dat de fiets binnen de wettelijke grenzen blijft. Laten we eens kijken naar de relevante standaarden en hoe ze zich tot elkaar verhouden:
Hoe communicatieprotocollen van invloed zijn op de naleving van e-bikes in de Europese Unie
Europese Unie (EU) - EN 15194: In de EU worden de meeste e-bikes (fietsen met trapondersteuning met motorvermogen <= 250W en ondersteuningsstop bij 25 km/u) geclassificeerd als EPAC's (Elektronisch bekrachtigde cycli). De standaard EN 15194 is van toepassing op EPAC's en definieert eisen en testmethoden voor veiligheid en prestaties. Dit omvat mechanische veiligheid (remmen, frame, enz.) en elektrische veiligheid (bedrading, EMC, enz.) en zorgt ervoor dat de fiets voldoet aan de snelheids- en vermogenslimieten.
- Voor communicatieprotocollen is een relevant aspect elektromagnetische compatibiliteit (EMC)Een goed ontworpen CAN of UART communicatielijn moet voldoen aan de EMC-tests (EN 15194 verwijst naar EN 55014 of vergelijkbaar voor EMC). Een goed ontworpen CAN- of UART-communicatielijn moet EMC-tests doorstaan (EN 15194 verwijst naar EN 55014 of vergelijkbaar voor EMC). De geluidsbestendigheid van CAN kan een voordeel zijn bij het voldoen aan deze EMC-eisen omdat het inherent beter omgaat met ruis, maar UART-systemen kunnen ook voldoen als ze goed afgeschermd zijn.
- Knoeien met snelheid en vermogen: EN 15194 vereist dat de ondersteuning stopt bij 25 km/u en dat de gebruiker deze limiet niet gemakkelijk boven de wettelijke waarde kan aanpassen. Als een fiets UART gebruikt en de fabrikant de programmeerpads toegankelijk laat, kan een gebruiker zou mogelijk beperken - dit kan problemen opleveren met de naleving. Sommige fabrikanten gebruiken daarom vergrendelde CAN-systemen om te voorkomen dat gebruikers de snelheidslimiet veranderen. Bij de CAN-motoren van Bafang ligt de snelheidslimiet bijvoorbeeld vast en kan deze niet via het display worden gewijzigd, waardoor de naleving van de voorschriften direct gegarandeerd is. Bij veel UART-systemen daarentegen kan een slimme gebruiker naar de instellingsmodus op het display gaan en de wielmaat of -limiet aanpassen of een programmeerkabel gebruiken, wat in strijd kan zijn met de letter van de wet als hij de motor sneller laat rijden dan 25 km/u.
- Elektrische veiligheid: EN 15194 (laatste herzieningen) behandelt de basisveiligheid van elektriciteit, maar interessant genoeg dekt de veiligheid van de batterij niet volledig - het gaat ervan uit dat de accu zelf moet voldoen aan andere normen. Het richt zich meer op de integratie, de bedrading en de basisbeveiliging (zoals geen blootliggende delen onder spanning, enzovoort). Een communicatieprotocol heeft hier niet direct invloed op, maar indirect kan een protocol zoals CAN, waarmee het GBS met de controller kan praten, de veiligheid verbeteren - het GBS kan bijvoorbeeld een commando "stop ontlading" sturen als de accu oververhit raakt. Hoewel dit niet verplicht is volgens EN 15194, helpt dit soort functies een fiets om aan de algemene veiligheidsverwachtingen te voldoen (voorkomen van thermische runaway gebeurtenissen).
Daarnaast moeten Europese e-bikes voor vrachtvervoer (met name die met goederen/passagiers) mogelijk voldoen aan het Machinerichtlijn als ze niet strikt onder de fietsregels vallen (sommige zware vrachtfietsen wel). Ook hier ligt de nadruk op robuuste fail-safes. Het gebruik van een solide communicatieprotocol met fail-safe gedrag (zoals CAN dat uitschakelt bij een fout) kan hierbij helpen.
Meer informatie over EU-norm voor e-bikes
Hoe communicatieprotocollen van invloed zijn op de naleving van e-bikes in de Verenigde Staten
Verenigde Staten - UL 2849 en andere: In de VS is de productie van e-bikes iets minder gereguleerd op federaal niveau wat betreft prestaties (er is een definitie van een e-bike voor lage snelheden als 750W max en 20 mph op gas/28 mph op trapondersteuning, maar geen verplichte constructienormen op federaal niveau). Echter, veiligheidscertificering wordt cruciaalVooral vanwege de brandgevaarlijke batterijen.
- UL 2849 is de belangrijkste veiligheidsnorm voor elektrische systemen van e-bikes in Noord-Amerika. Het omvat het gehele elektrische aandrijfsysteem van een e-bike, inclusief de accu, de motor, de oplader en alle onderlinge verbindingen. Bij UL 2849 testen wordt gekeken naar zaken als of de bedrading de stromen aankan, of het systeem is beveiligd tegen kortsluiting en, wat belangrijk is, het omvat ook UL 2271 voor batterijen (dat is een batterijspecifieke veiligheidsnorm). Op het gebied van communicatie schrijft UL 2849 geen protocol voor, maar het controleert bijvoorbeeld of het systeem veilig faalt als de communicatie wegvalt of als er een fout wordt gedetecteerd (geen thermische gebeurtenissen, geen op hol geslagen motor). Een CAN-gebaseerd systeem zou een kleine voorsprong kunnen hebben in het aantonen van redundantie (bijvoorbeeld, als het gasklepbericht verloren gaat, kan CAN dat detecteren en op de juiste manier time-out gaan). Maar zelfs UART-systemen kunnen worden ontworpen om aan UL 2849 te voldoen (ze hebben alleen een grondige foutafhandeling in de besturingsfirmware nodig).
- Preventie van brand en elektrische schokken: Normen zoals UL 2849 zijn gericht op het voorkomen van elektrische branden en schokken. Als er bijvoorbeeld een oplader op een e-bike is aangesloten, mag de communicatie tussen de batterij en de oplader (indien aanwezig) niet leiden tot overladen. Met name de EnergyBus-standaard die we noemden en die CAN-gebaseerd is, was deels ingegeven door veiligheidsoverwegingen - ervoor zorgen dat elke lader elke batterij veilig kan opladen door te communiceren via CANopen en alleen stroom toe te staan als de juiste handshaking is uitgevoerd . EnergyBus gebruikt een specifieke connector die CAN-datalijnen bevat, zodat een lader en batterij eerst communiceren en dan pas laadstroom toelaten, om vonken of verkeerd afgestemde spanningen te voorkomen. Dit concept sluit goed aan bij de UL-veiligheidslogica. Als een merk EnergyBus gebruikt, helpt het waarschijnlijk bij het behalen van veiligheidscertificaten omdat het inherent veilige interacties tussen componenten beheert.
- Naleving van regelgeving (snelheid/vermogen): In de VS is het klassensysteem (klasse 1, 2, 3 e-bikes) grotendeels gebaseerd op eer en wordt het niet zo streng gehandhaafd als de limieten in de EU, maar om aansprakelijkheidsredenen zorgen fabrikanten er meestal voor dat een e-bike die wordt verkocht als klasse 2 niet gemakkelijk kan worden aangepast om bijvoorbeeld meer dan 20 mph op gas te rijden. Ook hier kan het gebruik van een gesloten CAN-protocol helpen - gebruikers kunnen niet zomaar een kabel aansluiten en de motor ontgrendelen. Het is opmerkelijk dat veel e-bike bedrijven nu adverteren met UL-gecertificeerde batterijen of systemen om klanten te verzekeren van veiligheid. HOVSCO bijvoorbeeld (zoals te zien is in hun kennisbank) benadrukt dat hun fietsen voldoen aan UL 2849 voor elektrische veiligheid en EN 15194 voor algemene veiligheidsnaleving . Dit betekent dat hun bedrading, connectoren en communicatie allemaal moeten functioneren zonder gevaar te veroorzaken.
Internationale en andere standaarden: Naast EN 15194 en UL 2849 zijn er nog andere relevante normen, bijvoorbeeld, ISO 4210 (fietsveiligheidsnorm) met een deel dat de eisen voor e-bikes dekt, en de Duitse DIN 79010 voor bakfietsen (die, zoals we hebben opgemerkt, betrekking heeft op zaken als de sterkte van het frame onder belasting en remprestaties). Deze eisen hebben niet direct betrekking op de elektronica, maar een standaard voor bakfietsen kan impliciet vereisen dat bijvoorbeeld de ondersteuning niet hapert onder zware belasting. Een robuuste communicatie zorgt ervoor dat zelfs als de fiets wordt belast (en misschien het elektrische geluid toeneemt of de batterij verzwakt), de signalen tussen batterij, controller en sensoren betrouwbaar blijven.
Samenvattend, Naleving en veiligheid sturen sommige ontwerpbeslissingen tussen UART vs CAN. Een fabrikant die maximale veiligheid nastreeft, kan de voorkeur geven aan CAN vanwege de foutcontrole en -besturing, of extra beveiligingen implementeren op UART-systemen. Beide protocollen kunnen deel uitmaken van een veilig ontwerp, maar de manier waarop ze worden gebruikt is essentieel. De De gesloten aard van CAN-systemen kan naleving afdwingen (bijv. snelheidslimieten die niet door gebruikers kunnen worden aangepast, zoals wettelijk vereist) , terwijl UART-systemen bieden meer gebruikersvrijheid, wat een tweesnijdend zwaard is. Fabrikanten moeten ervoor zorgen dat zelfs UART-gebaseerde fietsen een fysieke of softwarematige begrenzer hebben die niet eenvoudig gehackt kan worden om binnen de wettelijke limieten te blijven.
Tot slot, ongeacht het protocol, is het gebruik van kwaliteitsconnectoren en -bedrading maakt deel uit van de naleving. In de EU moet de fiets bestand zijn tegen trillingen zonder dat draden losraken en in natte omstandigheden zonder kortsluiting. Connectoren zoals Higo/Julet (waterdichte connectoren die veel worden gebruikt in e-bikes) zijn niet alleen populair vanwege het gemak, maar ook omdat ze helpen te voldoen aan IP-classificaties en betrouwbaarheidseisen. Een CAN-bus maakt meestal gebruik van dergelijke connectoren (een enkele Higo 4 of 5-pins kan bijvoorbeeld de CAN-gegevens en voeding voor een display dragen). De keuze van het protocol verandert niets aan de noodzaak van goede trekontlasting, isolatie en vergrendelingsconnectoren om te voorkomen dat de verbinding wordt verbroken (wat gevaarlijk kan zijn als bijvoorbeeld je remuitschakelsignaal de controller niet bereikt omdat een kabel losschiet).
Ter afsluiting van dit hoofdstuk wil ik opmerken dat zowel Europa als de VS zich nu sterk richten op de veiligheid van e-bikes. Voldoen aan standaarden als EN 15194 en UL 2849 is in toenemende mate ononderhandelbaar voor gerenommeerde merken. Het communicatieprotocol is één stukje van de puzzel - een middel om ervoor te zorgen dat het elektrische systeem gecoördineerd is en beveiligd tegen storingen. De betrouwbaarheid van de CAN-bus kan helpen om aan deze normen te voldoen door robuuste communicatie te bieden, terwijl UART-systemen een zorgvuldig ontwerp vereisen om net zo veilig te zijn. Fabrikanten kiezen vaak het protocol dat het beste past bij de nalevingsstrategie: UART voor eenvoudigere ontwerpen waarbij het risico eenvoudig beheerst kan worden, of CAN voor complexe systemen waarbij de veiligheidsfuncties uitblinken.
Kosten en marktoverwegingen bij het kiezen van de communicatieprotocollen
Bij het kiezen tussen communicatieprotocollen (of in het algemeen bij het ontwerpen van het elektrische systeem van een e-bike) zijn de kosten een belangrijke factor - niet alleen de monetaire kosten, maar ook de "kosten" in termen van flexibiliteit en relaties met leveranciers. Dit is hoe de kosten zich tot elkaar verhouden en wat B2B inkopers of ingenieurs in overweging nemen:
- Hardwarekosten: Zoals eerder opgemerkt, gebruikt een op UART gebaseerd systeem meestal eenvoudiger hardware. De controller en het scherm hebben alleen UART-mogelijkheden nodig, die vrijwel alle microcontrollers hebben ingebouwd. De bedrading is misschien een beetje eenvoudiger (minder afsluitingen, etc.). Een CAN-gebaseerd systeem vereist iets meer: een CAN transceiver chip voor elk apparaat en mogelijk een krachtigere MCU (hoewel tegenwoordig zelfs redelijk goedkope MCU's CAN ingebouwd hebben). Het werkelijke verschil in BOM (Bill of Materials) kan in de orde van grootte van slechts een paar dollar per fiets zijn in grote volumes, maar in een concurrerende markt maakt dat nog steeds uit. Voor een grote fietsvloot vermenigvuldigen die dollars zich. Dat gezegd hebbende, de de kosten van CAN-hardware zijn gedaald aanzienlijk, en de afweging kan eenvoudig worden gerechtvaardigd door de toegevoegde functionaliteit die CAN biedt.
- Ontwikkelings- en integratiekosten: Voor een e-bike startup of een klein bedrijf kan het ontwikkelen van een CAN-gebaseerd systeem vanaf nul een kostbare zaak zijn als ze geen expertise in huis hebben. Het kan betekenen dat ze embedded systeemingenieurs moeten inhuren die bekend zijn met CAN, moeten investeren in tools en tijd moeten besteden aan het ontwikkelen van aangepaste firmware. Als alternatief, als ze een kant-en-klaar systeem kopen (zoals Bosch of Shimano aandrijvingen, die CAN-gebaseerd zijn), zijn de ontwikkelingskosten aan hun kant lager, maar de kosten per eenheid hoger (Bosch systemen zijn hoger geprijsd, deels omdat je een volledig geïntegreerde oplossing en de merknaam krijgt). A UART-systeem kan vaak worden samengesteld met behulp van kant-en-klare componenten met bekende compatibiliteit - veel bedrijven gebruiken bijvoorbeeld open-source of standaardprotocollen waarbij veel van de techniek al gedaan is en het risico lager is. Voor een B2B-koper (bijvoorbeeld een bedrijf dat een heleboel e-bikes onder hun merk wil) kan het kiezen voor UART betekenen dat ze goedkopere generieke onderdelen kunnen kopen, terwijl het kiezen voor CAN vaak betekent dat ze zich moeten aansluiten bij het ecosysteem van een bepaalde leverancier (die licenties of hogere prijzen kan vragen).
- Aftersales- en onderhoudskosten: Dit wordt soms over het hoofd gezien. Een wagenparkbeheerder (zoals een fietsdeeltoko of een bezorgbedrijf) kan merken dat CAN-bus-fietsen besparen op onderhoud. Waarom? Omdat ze problemen op afstand of sneller kunnen vaststellen. Een CAN-systeem kan foutcodes gedetailleerd rapporteren (bijvoorbeeld "fout temperatuursensor accu #2" als specifieke code). Technici kunnen diagnosetools aansluiten op de CAN-bus om problemen op te sporen. Dit kan de arbeidstijd verkorten. Ook zijn, zoals in de IoT Venture case, zaken als firmware-updates op afstand mogelijk, wat de kosten van het fysiek terugroepen van motoren voor bepaalde reparaties kan besparen. Aan de andere kant zou het initiële onderhoud van een UART-fiets eenvoudiger kunnen zijn (misschien minder dingen die mis kunnen gaan in de communicatie), maar als er iets mis is, moet je misschien met vallen en opstaan onderdelen vervangen omdat het systeem je niet precies kan vertellen wat er mis is, behalve misschien het knipperen van een LED. Voor een individuele consument kan een UART-fiets goedkoper zijn om te repareren omdat hij kant-en-klare onderdelen en kennis uit de gemeenschap kan gebruiken om het te repareren, terwijl een CAN-fiets hem misschien dwingt om naar een geautoriseerde service te gaan (mogelijk duurder). Er is dus een kostenafweging tussen bruikbaarheid (UART wint) en geavanceerde diagnostische ondersteuning (CAN wint, wat de kosten voor professionele dienstverlening zou kunnen verlagen).
- Licentie- en bedrijfseigen kosten: Het gebruik van een gepatenteerd CAN-protocol kan licentiekosten of beperkingen met zich meebrengen. Als een fietsmerk zijn eigen CAN-protocol ontwikkelt, is dat prima, maar als ze iets als CANopen of EnergyBus gebruiken, moeten ze zich mogelijk houden aan standaarden en zich mogelijk aansluiten bij verenigingen (bijv. EnergyBus e.V.). Deze kosten zijn over het algemeen klein, maar het vermelden waard. Eigendomsgebonden systemen zoals Bosch betekenen in feite dat de OEM van de fiets de aandrijfeenheden als een pakket koopt; Bosch bepaalt de prijs. Met UART-systemen is er vaak meer concurrentie tussen onderdelenleveranciers, wat de prijzen kan drukken.
- Klantperceptie en waarde: Vanuit marketingperspectief kan een merk een hogere prijs rechtvaardigen voor een fiets met "automotive CAN-bus elektronica" omdat het geavanceerd en betrouwbaar klinkt (zelfs als de klant het verschil niet direct ziet). Er zit waarde in de eersteklas gevoel en prestaties die CAN-systemen vaak met zich meebrengen (ze zitten meestal op motoren die ook motoren van hoge kwaliteit hebben, etc.). Dus, merken die zich richten op de duurdere markt of commerciële klanten kunnen CAN gebruiken als onderdeel van een premium aanbod. Omgekeerd geldt voor e-bikes op instapniveau dat klanten het vooral belangrijk vinden dat het werkt en betaalbaar is - ze zullen niet extra betalen alleen omdat het display van de fiets CAN gebruikt in plaats van UART. Dus, de protocolkeuze moet afgestemd zijn op het marktsegment van de fiets.
- Toekomstbestendig maken: Een kostenpost waar ingenieurs rekening mee houden is de opportuniteitskosten van niet toekomstbestendig zijn. Als je nu investeert in een UART-gebaseerd platform, maar volgend jaar meer functies wilt toevoegen (bijvoorbeeld een tweede batterij of een nieuw sensortype), dan kan het oude platform beperkend zijn, waardoor een herontwerp noodzakelijk wordt. Sommige bedrijven besluiten dat het op de lange termijn kosteneffectiever is om vanaf het begin met CAN te werken, zelfs als dat niet volledig wordt gebruikt, om ruimte over te houden voor nieuwe functies en accessoires. Dit kan later herontwikkelingskosten besparen. Het is een strategische beslissing: vooraf iets meer betalen versus later mogelijk veel meer om te upgraden.
Wat de werkelijke prijs betreft: dat is moeilijk te zeggen, maar een ingewijde in de industrie zou bijvoorbeeld kunnen zeggen dat een basis UART e-bike controller + display in bulk $50-$100 kan kosten, terwijl een gelijkwaardige CAN-gebaseerde set van een groot merk een paar honderd dollar kan zijn (omdat die geavanceerder is). Dat verschil omvat echter vaak ook betere motorprestaties, garantie, etc., en niet alleen het verschil in communicatie. De incrementele kosten puur voor protocol (bijvoorbeeld het toevoegen van een CAN-chip) is klein, maar de ecosysteemkosten (koppeling aan een duur systeem versus een goedkoop generiek systeem) kan groot zijn.
Om het duidelijk te stellen voor een B2B koper van e-bikes:
- Als je prioriteit is laagste eenheidsprijs en je wilt flexibiliteit om bij meerdere leveranciers in te kopen, dan is een UART-gebaseerd open systeem aantrekkelijk is. Je kunt rondkijken voor beeldschermen en controllers die bij elkaar passen en mogelijk zelfs onderhandelen met meerdere fabrieken.
- Als je prioriteit is prestaties, betrouwbaarheid en een kant-en-klaar systeem (en je bent bereid ervoor te betalen), een CAN-gebaseerd systeem van een gerenommeerde leverancier kan je hoofdpijn besparen en waarde toevoegen aan je product (tegen hogere kosten, die je hopelijk terugverdient door je fietsen hoger te prijzen of door volume-efficiëntie).
Beperkingen en toekomstige trends
Zelfs als we de deugden van UART en CAN ophemelen, is het de moeite waard om te wijzen op de beperkingen van de huidige stand van e-bike communicatie en waar het naartoe zou kunnen gaan:
- Gebrek aan industriebrede standaardisatie: In tegenstelling tot de autowereld, waar bijna elke auto gebruik maakt van CAN-bus en gestandaardiseerde diagnose (OBD-II), is de e-bike-industrie nog steeds gefragmenteerd. Er is geen universeel protocol die alle e-bikes gebruiken. UART-implementaties variëren (elke fabrikant kan verschillende gegevensformaten hebben via UART) en CAN-implementaties zijn vaak propriëtair. Dit is een beperking voor consumenten en fietsassembleurs - het is niet "plug and play" tussen verschillende merken. Je kunt geen willekeurig display nemen en verwachten dat het werkt met een willekeurige controller, tenzij ze expliciet hetzelfde protocol en dezelfde firmware gebruiken. EnergyBus is een veelbelovende poging om te standaardiseren (met CANopen CiA-454 dat berichten definieert voor e-bike componenten), maar het is nog niet alomtegenwoordig. Als EnergyBus of vergelijkbare standaarden aanslaan, kunnen we echt interoperabele componenten zien - bijvoorbeeld een batterij van fabrikant X kan worden gebruikt met een motorsysteem van fabrikant Y, waarbij het CANopen-gebaseerde protocol ervoor zorgt dat ze elkaar begrijpen. Dit zou voordelig zijn voor B2B-kopers (meer leveranciersopties) en consumenten (meer upgrade-/reparatieopties). Spelers in de industrie hebben echter ook zakelijke motieven om propriëtaire systemen in stand te houden (om klanten aan zich te binden). De spanning tussen standaardisatie vs. bedrijfseigen controle zal de toekomst van e-bike protocollen bepalen.
- Bandbreedte en gegevensbehoeften: Op dit moment bevat de communicatie van e-bikes relatief weinig gegevens. Maar toekomstige e-bikes zouden meer informatie kunnen streamen - stel je voor dat je hoogfrequente gegevens van koppelsensoren verzamelt, of vermogensmetingen met een hoge resolutie voor trainingsdoeleinden, of zelfs videobeelden van camera's voor de veiligheid. CAN op klassieke snelheden kan een knelpunt worden als er veel gegevens moeten worden verzonden. De auto-industrie heeft CAN-FD (een uitgebreide versie van CAN met grotere gegevensframes en een hogere doorvoer) en andere protocollen zoals Ethernet voor behoeften met een hoge bandbreedte. Voor e-bikes zou CAN-FD uiteindelijk kunnen verschijnen als dat nodig is, of BLE/Wi-Fi voor het offloaden van datalogs. Draadloze communicatie zou ook een aanvulling kunnen zijn op bekabelde protocollen: veel e-bikes maken al gebruik van Bluetooth Low Energy om de fiets te verbinden met een smartphone-app. Dat valt buiten het bereik van het interne elektrische systeem, maar is het vermelden waard als een parallel kanaal. Misschien dat in de toekomst sommige eenvoudigere e-bikes zelfs afzien van een bekabeld display en een draadloze module naar een telefoon gebruiken - hoewel kritieke bediening (zoals gas- of remsignalen) waarschijnlijk bekabeld zou blijven voor de betrouwbaarheid. In vrachtparken zouden we meer integratie van V2X-communicatie (vehicle-to-everything) kunnen zien - e-bikes die praten met logistieke systemen of verkeersinfrastructuur, ook weer gelaagd bovenop het CAN-bussysteem.
- Beveiligingsproblemen: Naarmate e-bikes meer met elkaar verbonden worden en complexere communicatie gebruiken, cyberbeveiliging een probleem wordt. Een UART systeem zonder externe connectiviteit is praktisch immuun voor hacken (iemand zou fysiek de draden moeten aftappen). Maar een CAN-bus die gekoppeld is aan een Bluetooth-module of een GSM-module (voor het volgen van wagenparken) introduceert potentiële kwetsbaarheden. Fabrikanten zullen ervoor moeten zorgen dat hun protocollen (vooral draadloze interfaces naar de bus) veilig zijn om kwaadwillige controle te voorkomen (stel je een IoT-hack voor die een vloot bakfietsen op afstand kan uitschakelen - een vergezocht maar theoretisch mogelijk scenario als het niet beveiligd is). Propriëtaire protocollen zijn van nature enigszins veilig door obscuriteit, maar als CAN gemeengoed wordt in e-bikes, kunnen kwaadwillenden proberen CAN-berichten te injecteren via een open poort. Het is dus mogelijk dat we in de toekomst meer encryptie of authenticatie zullen zien in e-bike communicatie.
- Gebruikerservaring: Uiteindelijk moet welk protocol er ook wordt gebruikt, het moet een goede gebruikerservaring bieden. Bestuurders hechten waarde aan zaken als een soepele vermogensafgifte, accurate informatie op het display en veiligheidsfuncties die werken wanneer dat nodig is. Een beperking in vroege CAN-gebaseerde systemen was dat ze soms te vergrendeld - gebruikers voelden zich gefrustreerd omdat ze zelfs eenvoudige voorkeuren niet konden wijzigen. Naarmate de systemen volwassener worden, kunnen fabrikanten manieren vinden om gebruikers flexibiliteit te geven (via geautoriseerde apps of instellingen) zonder de controle in gevaar te brengen. Een app kan bijvoorbeeld beperkte tuning (binnen veilige grenzen) toestaan, zelfs op een CAN-systeem, of accessoires van derden die gecertificeerd zijn toestaan om te communiceren op de bus (misschien met behulp van standaard EnergyBus-berichten). We kunnen een beetje meer openheid verwachten naarmate protocollen standaardiseren, ironisch genoeg zelfs in een CAN-wereld.
Tot slot Het elektrische communicatiesysteem van e-bikes - UART of CAN - is cruciaal voor de prestaties, veiligheid en modulariteit van de fiets.. Ingenieurs die e-bikes ontwerpen moeten de eenvoud van UART afwegen tegen de geavanceerdheid van CAN. B2B inkopers moeten overwegen hoe de keuze de kosten, de toeleveringsketen en de waardepropositie van hun product beïnvloedt. De industrie lijkt te evolueren in de richting van CAN-bus naarmate e-bikes zich ontwikkelen tot meer verbonden en capabele machines, maar UART-gebaseerde systemen zullen waarschijnlijk nog wel enige tijd parallel blijven lopen voor eenvoudigere, goedkopere modellen (ze zijn tenslotte "goed genoeg" voor een groot deel van de fietsers).
Door deze communicatieprotocollen te begrijpen - in wezen de elektrische taal van e-bikes - krijg je een veel grotere waardering voor hoe een e-bike intern werkt. Van de draai aan je gaspedaal of de druk op je pedaal, tot de golfslag van de motor en de cijfers op je display, het wordt allemaal mogelijk gemaakt door bits en bytes die langs draden zoeven en ervoor zorgen dat batterij, motor en berijder zijn gesynchroniseerd. En of het nu gaat om een gestroomlijnde e-bike voor in de stad of een zware vrachtvervoerder, die harmonie zorgt ervoor dat de rit moeiteloos en veilig aanvoelt. Uiteindelijk is het doel van elk protocol om de technologie naar de achtergrond te laten verdwijnen, zodat berijders gewoon van de reis kunnen genieten - maar nu hopelijk met een beetje inzicht in de indrukwekkende elektronische coördinatie die onder hun voeten plaatsvindt.
Bronnen:
- Qiolor Ebike Gids - "Hoe kies je een compatibel scherm voor je Ebike-controller? (2025) - bespreken van UART- vs CANBUS-talen en het belang van overeenkomende protocollen.
- Velco.tech "CAN vs UART: verschillen tussen communicatiemodi". (2024) - de eenvoud van UART versus de netwerkmogelijkheden van CAN uitleggen en hun voordelen/beperkingen opnoemen .
- Biktrix Helpcentrum - "Wat zijn de CANBUS- en UART-protocollen?" - gebruikersgerichte kijk op hoe CAN instellingen vergrendelt (snelheidslimiet vast) vs UART wijzigingen toestaat , plus een vergelijking van de uitwisselbaarheid van displays .
- IoT Venture (Casestudy met CYCLE vloot) - beschrijft de voordelen van CAN-integratie in e-bike wagenparken: toegang tot onderhoudsgegevens, motor op afstand uitschakelen, OTA-updates .
- HOVSCO Kennis - "Welke veiligheidsvoorzieningen hebben elektrische fietsen?" - notities over EN 15194 (EU) die snelheid/vermogenslimieten en duurzaamheid garanderen, en UL 2849 (VS) gericht op elektrische/brandveiligheid , evenals vermelding van DIN 79010 voor bakfietsveiligheid .
- Texas Instruments app Note - "Overwegingen bij het hardwareontwerp voor een elektrische fiets met BLDC-motor". - typische blokschema's van e-bikesystemen en inzicht in de besturingselektronica.
- Letrigo Ebike Kennis - "Bedrading E-bike display uitgelegd" - Details over bedrading, connectoren (Higo/Julet) en waarschuwt dat er geen universele bedradingsstandaard bestaat, waarbij de nadruk wordt gelegd op de juiste afstemming van aansluitingen en robuuste bedrading voor signaalintegriteit.
- EnergyBus-standaard - Introductie van Kvaser - beschrijft EnergyBus als een open, op CANopen gebaseerde standaard voor LEV-componenten om compatibiliteit en veiligheid tussen fabrikanten te garanderen.




