
Elcyklar, inklusive lastcyklar, är beroende av ett invecklat elektriskt system för att koppla samman batteri, motor, styrenhet, sensorer och användargränssnitt. Systemets kommunikationsprotokoll fungerar som det "språk" som gör att alla dessa komponenter kan samordnas sömlöst. I den här populärvetenskapliga översikten förklarar vi vad dessa kommunikationsprotokoll är och hur de fungerar i elcyklarnas elsystem. Vi går igenom de olika typerna av protokoll som används, hur de skiljer sig åt, var de används, för- och nackdelar, kostnadsaspekter, överensstämmelse med säkerhetsstandarder i EU och USA samt begränsningar. Målet är att tillhandahålla en tydlig, auktoritativ guide för våra kunder och vår publik, som balanserar tekniskt djup med praktisk förståelse.
Nyckelkomponenter för elcyklar - "nervsystemet"
Man kan tänka sig att elcyklar har ett centralt nervsystem med ledningar och datalänkar som kopplar samman alla kritiska komponenter. Precis som nerverna leder signaler i en kropp, leder ledningsnätet både ström- och datasignaler över hela cykeln. Viktiga komponenter i ett typiskt elektriskt system för en elcykel är bl.a:

- Batteripaket: Den likströmskälla (vanligen 36-48 V) som förser systemet med energi. Det ansluts till styrenheten via tjocka strömkablar (med säkringar eller brytare för säkerhets skull) för att leverera huvudströmmen. Vissa avancerade batterier har även en datalänk (via kommunikationsledningar) för att dela status- eller styrsignaler med styrenheten.
- Motor och styrenhet: Motorn (navmotorn i ett hjul eller en mellandrivning vid veven) får ström från motorstyrenheten, som är "hjärnan" som reglerar motoreffekten baserat på förarens inmatningar och sensoråterkoppling. Styrenheten är en elektronisk enhet med en mikroprocessor som tar emot signaler (gasreglage, pedalsensor, bromsar etc.) och styr strömmen till motorn. Motorer har vanligtvis fasledningar (tunga kablar som transporterar ström) och sensorkablar (tunna kablar från Halleffektsensorer som ger feedback om rotorposition) som går till styrenheten.
- Mänskligt gränssnitt (gasreglage, pedalsensor, display): Föraren kommunicerar med elcykeln via enheter som gasreglaget (ofta ett handtag på styret med en hall-effektsensor som matar ut en variabel spänningssignal för att begära hastighet) och pedalassistanssensorn (PAS) som känner av tramprörelsen via magneter och sensorer. Displayenheten på styret visar hastighet, batterinivå, assistansnivå etc. och har ofta knappar som föraren kan använda för att justera inställningarna. Displayen och styrenheten utbyter data via en flertrådig kabel som innehåller ström- och kommunikationsledningar .
- Säkerhetsavstängningar (bromshandtag): Bromshandtag för elcyklar har vanligtvis brytare som skickar en signal till styrenheten för att omedelbart stänga av motoreffekten vid bromsning. Vanligtvis används en enkel tvåtrådskrets för detta, som fungerar som en på/av-signal till styrenheten .
- Belysning och tillbehör: Många elcyklar har även fram-/bakljus, signalhorn, USB-laddare osv. Dessa kan styras av huvudstyrenheten eller fungera på separata kretsar, men i avancerade system kan de även adresseras via kommunikationsbussen.
För en detaljerad guide till tillbehör för elcyklar och lastcyklar kan du läs den här artikeln för ett mer omfattande svar eller kanske kolla in vår Lastcykel 101 sida.
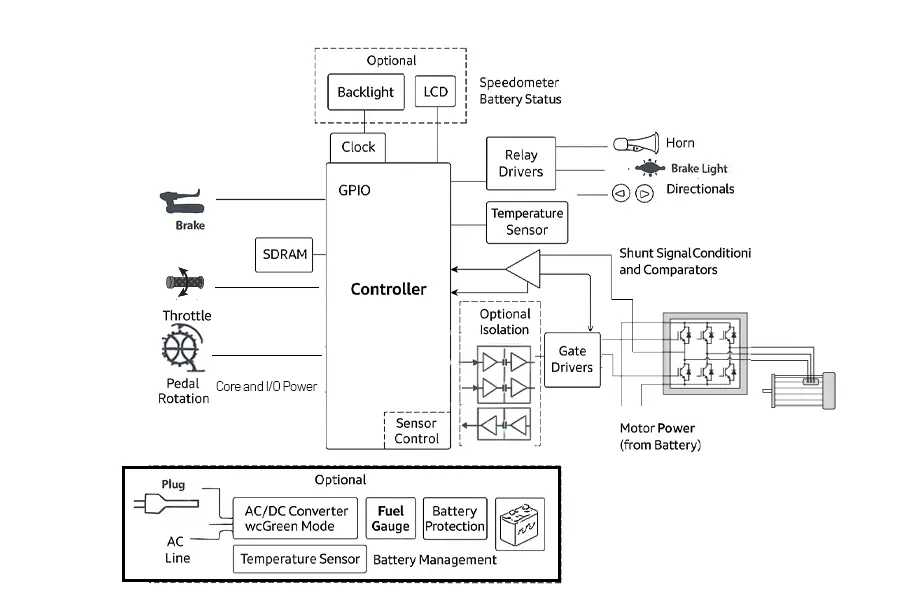
Figur 2: Blockschema över ett typiskt system för styrning av elcyklar och batterihantering. Den centrala styrenheten har gränssnitt mot viktiga ingångar - gasreglage, pedalsensorer, bromshandtag - och hanterar utgångar som motordrivna signaler via grinddrivrutiner, relädrivrutiner och GPIO-anslutningar. Tillvalsmoduler som LCD-displayer, batteriladdare, bränslemätare och bakgrundsbelysning utökar systemets funktionalitet. Kommunikation mellan komponenterna stöder realtidskoordinering av motoreffekt, belysning, säkerhetsavstängningar och övervakning av batteristatus.
Vad är kommunikationsprotokoll för elcyklar?
I samband med elcyklar avser kommunikationsprotokoll den metod och det format som elektroniska komponenter använder för att utbyta data. Tidiga eller grundläggande elcyklar hade ofta inte ett komplext digitalt nätverk - många signaler var analoga eller enkla på/av-kretsar. Till exempel skickar ett gasreglage en analog spänning för att indikera hur mycket kraft cyklisten vill ha, och en bromsbrytare öppnar eller stänger helt enkelt en krets för att minska kraften. Men i takt med att elcyklarna har blivit mer sofistikerade - med smarta displayer, avancerade sensorer och till och med GPS- eller smartphoneintegration - har det uppstått ett behov av mer robust digital kommunikation.
Idag domineras elcykelsystemen av två primära digitala kommunikationsprotokoll:
- UART (Universal Asynchronous Receiver-Transmitter): En seriell kommunikationsmetod som skapar en direkt en-till-en datalänk mellan två enheter (vanligtvis styrenheten och displayen).
- CAN-buss (Controller Area Network): Ett nätverksprotokoll som gör det möjligt för flera enheter (styrenhet, display, batteri BMS, sensorer etc.) att kommunicera via samma delade busskablar.
Förutom UART och CAN Bus används ibland två andra kommunikationsprotokoll i elcykelsystem:
- SIF (Serial Interface Format): Detta är ett proprietärt eller förenklat protokoll som är vanligt förekommande i vissa märkesbaserade system (t.ex. Shimano STEPS eller äldre displayenheter). Det används vanligtvis för grundläggande datautbyte mellan styrenheten och displayen eller fjärrknapparna. Eftersom SIF saknar öppen standardisering och flexibilitet är det oftast begränsat till specifika märken eller äldre modeller.
- RS-485 (rekommenderad standard 485): RS-485 är ett seriellt kommunikationsprotokoll av industriell kvalitet som är känt för sin tillförlitlighet på långa avstånd och sin tålighet mot brus. Även om det inte är lika vanligt som UART eller CAN i elcyklar för konsumenter, förekommer det i vissa avancerade eller kommersiella fordonssystem, särskilt där robusthet och utökad kabeldragning krävs - som för delade cyklar, hyrflottor eller tunga elcyklar.
Dessa protokoll är i princip "språken" i elcykelns elektronik. Om alla komponenter talar samma språk flödar informationen korrekt; om inte, förstår enheterna inte varandra. Det är därför det är så viktigt att matcha protokollet när man till exempel kopplar ihop en display med en styrenhet. Även om kontakten passar, innebär en inkompatibilitet i protokollet att delarna inte fungerar tillsammans.
Översikt över marknadsanvändning (2024-2025 uppskattade trender)
Även om det inte finns någon allmänt publicerad uppdelning av protokollanvändningen på elcykelmarknaden, baserat på branschinsikter och större systemleverantörer (t.ex. Bosch, Bafang, Shimano, Mahle etc.), är följande en rimlig uppskattad fördelning från och med 2025:
| Protokoll | Användningsandel (uppskattad) | Vanliga tillämpningar | Anteckningar |
|---|---|---|---|
| UART | ~50-60% | Elcyklar i mellanklass till nybörjarsegmentet | Används ofta tack vare enkelhet och låg kostnad |
| CAN-buss | ~30-35% | Avancerade, smarta eller modulära elcyklar | Ökad användning med smart integration |
| RS-485 | ~5-10% | Flottans system, kommersiella installationer med långa ledningar | Begränsad till specifika användningsfall |
| SIF / Äganderätt | <5% | Varumärkesspecifika eller äldre system | Finns oftast i äldre eller låsta ekosystem |
Obs! Dessa siffror är generaliserade över de globala marknaderna (EU, CN, NA) och baseras på OEM-trender, offentlig dokumentation, data från demontering och insikter från komponentleverantörer.
Definiera kommunikationsprotokoll för elcyklar på ett enklare sätt :
Enkelt uttryckt är kommunikationsprotokollen i elcyklar följande språk eller regler som gör att olika elektroniska delar kan prata med varandra. Om komponenterna inte talar samma språk kan de inte förstå varandra - även om kontakten fysiskt passar.
📞 Analogi: En-till-en-samtal vs. gruppchatt
Låt oss föreställa oss två sätt att kommunicera i vardagen för att förstå protokoll för elcyklar:
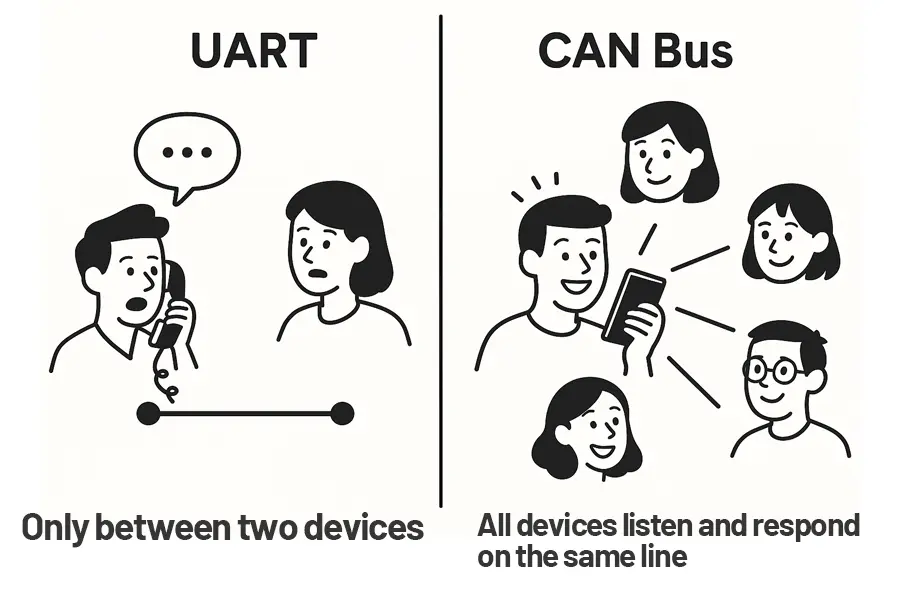
UART: Som ett telefonsamtal mellan två personer
- UART (Universal Asynchronous Receiver-Transmitter) är som att ringa en vän på telefon.
- Endast två enheter kan prata samtidigt - som din display och din styrenhet.
- Om du vill prata med en annan enhet behöver du en annan tråd (eller ett annat telefonsamtal).
- Det är enkelt, men inte skalbart när du har många enheter.
- Vanlig i grundläggande system för elcyklar med begränsade funktioner.
AN Bus: Som en gruppchatt
- CAN-bussen (Controller Area Network) är som en Gruppchatt på WhatsApp eller WeChat.
- Alla enheter (styrenhet, batteri, display, sensor, lampor) finns i samma chattrum.
- Varje meddelande är märkt med ett avsändar-ID och varje enhet läser bara de meddelanden som är avsedda för den.
- Det är mycket mer effektiv och perfekt när det finns många komponenter som måste fungera tillsammans.
- Används i smarta, avancerade system för elcyklar, ofta med GPS, Bluetooth och appintegration.
| Särdrag | UART (telefonsamtal) | CAN-buss (gruppchatt) |
|---|---|---|
| Typ av anslutning | Ett-till-ett (punkt-till-punkt) | En-till-många (delad buss) |
| Skalbarhet | Låg - kräver extra kablar för fler enheter | Hög - flera enheter delar på samma kablar |
| Kommunikationsflöde | Endast mellan två enheter | Alla enheter lyssnar och svarar på samma linje |
| Komplexitet | Enkel | Mer komplex men kraftfull |
| Användningsfall | Vanliga elcyklar (endast display ↔ styrenhet) | Smarta elcyklar med BMS, app, sensorer etc. |
Kommunikationsprotokollens roll
Kommunikationsprotokoll i elcyklar tjänar flera viktiga syften:
- Delning av data: De gör det möjligt för styrenheten att skicka realtidsdata till displayen (hastighet, batteriets laddningsstatus, felkoder) och ta emot kommandon tillbaka (t.ex. ändra assistansnivå, tända/släcka lampor). Utan ett korrekt protokoll kan det hända att du inte får en tillförlitlig hastighetsavläsning eller att du inte kan justera inställningarna.
- Samordning av komponenter: I avancerade system måste flera mikrokontroller samordnas. Ett smart batteri med ett eget batterihanteringssystem (BMS) kan t.ex. kommunicera med motorstyrenheten för att förhindra överström eller för att visa exakt batteriprocent. Med en CAN-buss eller liknande nätverk kan batteriet, motorstyrningen, displayen och till och med sensorerna dela information i ett nätverk med flera noder.
- Säkerhet och tillförlitlighet: Ett väl utformat protokoll säkerställer att om det uppstår ett fel eller en signalförlust (t.ex. om en kabel är skadad) kan systemet upptäcka det och vidta säkra åtgärder (t.ex. att stänga av motoreffekten). Robusta protokoll som CAN innehåller felkontroll och meddelandeprioritering för att hantera detta. Enklare analoga signaler saknar sådan felhantering - om en gasreglage-kabel lossnar kan styrenheten misstolka brus som en gasreglage-signal om det inte finns några säkerhetsbestämmelser.
- Utbyggbarhet: För elcyklar med många funktioner (GPS-spårare, stöldskydd, flera assistanssensorer etc.) gör ett kommunikationsnätverk det enklare att lägga till eller ta bort enheter. I stället för att varje ny enhet behöver en egen kabellänk till styrenheten kan en enhet ansluta sig till den gemensamma bussen och dela data med alla andra. Denna skalbarhet är en viktig anledning till att moderna, avancerade elcyklar går över till CAN-buss.
Sammanfattningsvis är kommunikationsprotokollet en ryggrad i elcykelns elektriska system, som säkerställer att alla elektroniska delar fungerar tillsammans. I ett annat inlägg ska vi dyka ner i de två huvudsakliga protokolltyperna (UART och CAN), undersöka hur de fungerar och deras respektive användningsområden i e-cyklar och elcyklar för last. kolla om du är intresserad:
- "Förstå UART i elcyklar: Hur enkel seriell kommunikation driver din cykel"
- En nybörjarvänlig guide till hur UART möjliggör grundläggande datautbyte mellan elcykelkomponenter som displayer och styrenheter.
- "Vad är CAN-buss i elcyklar? Ett smartare sätt att ansluta batterier, sensorer och mycket mer"
- Lär dig hur moderna elcyklar använder CAN Bus för att stödja kommunikation med flera enheter, avancerade displayer och systemdiagnostik.
Tillämpningsscenarier: Vilket kommunikationsprotokoll för vilken elcykel?
Det är bra att förstå hur UART och CAN väljs i praktiken för olika elcykelkonstruktioner. Vi kommer att överväga två breda kategorier: elcyklar för konsumenter (inklusive vanliga pendlar- eller fritidscyklar) och elcyklar för gods/flotta (används ofta för företagsleveranser eller av uthyrningsflottor)och konstaterade att dessa ofta har olika prioriteringar.

- Vanliga konsumentelcyklar (City-, Mountain-, Road-elcyklar): Det här är de cyklar som många köper för personligt bruk. De sträcker sig från instegsnivå till mycket avancerade. I det lägre prissegmentet (kostnadskänsliga modeller) är UART-kommunikation extremt vanligt. Till exempel använder en enkel 36V pendlarcykel med en kadenspedalsensor och en enkel LED-display sannolikt en UART (eller till och med analoga signaler) mellan styrenheten och den minimala display som finns. Fokus här är kostnadseffektivitet och grundläggande funktionalitet. Många sådana cyklar använder allmänt tillgängliga styrenheter och displayer som följer ett de facto UART-protokoll, vilket innebär att cykelmärken kan köpa komponenter från olika OEM-tillverkare. Detta är attraktivt för B2B-köpare som vill ha flexibiliteten att använda, säg, en snyggare display från leverantör A med en styrenhet från leverantör B - så länge båda talar UART i samma format kan det fungera (även om man måste verifiera kompatibiliteten för pinouts och firmware) . På de mer avancerade konsumentcyklarna, särskilt de som tillverkas av stora varumärken, finns det en trend mot CAN-buss. Högpresterande e-MTB:er eller e-roadcyklar med vridmomentsensorer och snygga displayer kan använda CAN för att integrera allt på ett smidigt sätt. Vissa märken använder dock fortfarande UART eller andra egna serielänkar även i avancerade cyklar; det varierar beroende på tillverkare och deras designfilosofi.

- Lastcyklar och kommersiella flottor: Lastcyklar är utformade för att transportera tunga laster eller passagerare och används ofta av företag (leveransservice, postcyklar etc.). Dessa cyklar tenderar att prioritera robusthet, säkerhet och kapacitet för vagnparkshantering över kostnaden för elektronik. Det är i det här segmentet som CAN-bussen verkligen har vunnit mark. Lastcyklar kan till exempel ha dubbla batterier för att öka räckvidden - hantering av två batterier kräver kommunikation för att balansera urladdningen eller åtminstone för att rapportera status för varje batteri. CAN gör det enklare för en styrenhet att kommunicera med två BMS-enheter (en i varje batteri) på samma buss. Lastcyklar kan också ha extra tillbehör: bromsljus, blinkers, till och med elektroniska lås - att samordna dessa via en central buss förenklar kabeldragning och styrning. Eftersom elcyklar för gods ofta används i flottor vill företagen dessutom ha telematik på dem: GPS-trackers som kan rapportera cykelns plats, användning och eventuella fel. Med ett CAN-aktiverat system kan en telematikmodul helt enkelt tjuvlyssna på CAN-meddelanden om hastighet, batteristatus etc. och ladda upp informationen. En fallstudie med en europeisk leveransflotta visade att man genom att koppla in sig på CAN-bussen kunde fjärrövervaka underhållsdata (t.ex. körsträcka), fjärravaktivera motorn för stöldskydd och göra luftburna uppdateringar av cykelns firmware - funktioner som är mycket användbara för flotthantering. Detta skulle vara besvärligt att implementera på en UART-baserad cykel.
- Mix-and-Match kontra integrerade system: Om ett elcykelmärke vill ha friheten att blanda komponenter eller tillåta eftermarknadsuppgraderingar tenderar de att hålla sig till UART-baserade system. Vi såg att UART-system gör det enkelt att byta display eller justera motorinställningar. Ett mindre elcykelföretag kanske föredrar den här vägen för att undvika att vara låst till en leverantör - de kan byta motor-/styrkretsleverantör utan att ändra hela ekosystemet, så länge protokollet förblir UART och de kan anpassa den inbyggda programvaran. Å andra sidan, företag som fokuserar på systemoptimering och efterlevnad väljer ofta CAN. Till exempel använder Bosch-drivna elcyklar en CAN-liknande buss (Bosch har ett eget CAN-baserat protokoll) som förbinder motor, display och batteri. Detta säkerställer att inga tredjepartsdelar kan störa; allt är finjusterat tillsammans. Fördelen är utmärkt tillförlitlighet och säkerhet - systemet ger ett felmeddelande om något är utanför specifikationerna. Nackdelen är att du som B2B-köpare (t.ex. en cykeltillverkare som väljer Bosch) förbinder dig att köpa motor, styrenhet, batteri, display alla från Bosch som ett paket.
- Lastcyklar - Särskilda överväganden: Lastcyklar, särskilt i EU, utsätts ofta för strängare granskning eftersom de kan transportera tyngre laster eller till och med passagerare. I Tyskland finns det till exempel en standard (DIN 79010) som är specifik för lastcykelsäkerhet (främst mekaniska aspekter som ramstyrka och bromsning). Även om den standarden inte dikterar kommunikationsprotokoll, är säkerhetstänkande i lastcyklar uppmuntrar till att använda ett protokoll som kan säkerställa att om något går fel (överhettad motor eller svagt batteri) kan systemet kommunicera det och vidta åtgärder. CAN:s robusthet och felhantering bidrar till att uppfylla dessa säkerhetsmål. Dessutom används elcyklar ofta i stadsmiljöer (leverans i städer) där det finns mycket radio/elektriskt brus och riskerna är höga om ett kommunikationsfel inträffar vid fel tidpunkt. Den brusimmunitet hos CAN är ett stort plus här, eftersom det förhindrar missförstånd som kan leda till felaktigt beteende.


Säkerhetsstandarder och överensstämmelse för elsystem (EU/US)
Oavsett vilket kommunikationsprotokoll som används måste elcyklarnas elsystem följa säkerhetsstandarder för att säkerställa att de fungerar säkert och lagligt, särskilt på viktiga marknader som Europa och USA. Kommunikationsprotokollet kan indirekt påverka en cykels efterlevnad - till exempel kan ett protokoll som tillåter obegränsade användarändringar utgöra en efterlevnadsrisk, medan ett protokoll som är låst kan bidra till att cykeln håller sig inom lagliga gränser. Låt oss gå igenom de relevanta standarderna och hur de förhåller sig till varandra:
Hur kommunikationsprotokoll påverkar elcyklars överensstämmelse i Europeiska unionen
Europeiska unionen (EU) - EN 15194: I EU klassificeras de flesta elcyklar (pedalassisterade cyklar med motoreffekt <= 250W och assistansavbrott vid 25 km/h) som EPACs (Cyklar med elektronisk kraftassistans). Standarden EN 15194 gäller för EPAC och definierar krav och provningsmetoder för säkerhet och prestanda . Detta inkluderar mekanisk säkerhet (bromsar, ram etc.) och elektrisk säkerhet (ledningar, EMC etc.), samt att säkerställa att cykeln uppfyller hastighets- och effektgränserna.
- För kommunikationsprotokoll är en relevant aspekt Elektromagnetisk kompatibilitet (EMC)Systemet får inte avge överdrivna störningar eller påverkas i onödan av störningar. En välkonstruerad CAN- eller UART-kommunikationslinje bör klara EMC-tester (EN 15194 hänvisar till EN 55014 eller liknande för EMC). Den CAN:s bullerresistenta egenskaper kan vara en fördel när det gäller att uppfylla dessa EMC-krav eftersom det i sig hanterar brus bättre, men UART-system kan också uppfylla kraven om de är ordentligt avskärmade.
- Hastighet och effekt manipuleras: EN 15194 kräver att assistansen stängs av vid 25 km/h och att användaren inte enkelt kan justera denna gräns över det lagliga värdet. Om en cykel använder UART och tillverkaren lämnar programmeringsdynorna åtkomliga, kan en användare kan eventuellt ta bort spärren - detta kan leda till problem med efterlevnaden. Vissa tillverkare använder därför låsta CAN-system specifikt för att förhindra att användarna ändrar hastighetsgränsen. Till exempel har Bafangs CAN-baserade motorer en fast hastighetsgräns som inte kan ändras via displayen, vilket bidrar till att säkerställa efterlevnad av reglerna direkt från start. På många UART-system kan däremot en kunnig användare gå in i inställningsläget på displayen och justera hjulstorleken eller gränsen, eller använda en programmeringskabel, vilket kan bryta mot lagens bokstav om de får cykeln att överskrida 25 km/h assistans.
- Elektrisk säkerhet: EN 15194 (senaste revideringar) omfattar grundläggande elsäkerhet, men intressant nog täcker inte helt batteriets säkerhet - den förutsätter att själva batteripaketet uppfyller andra standarder. Den fokuserar mer på integration, kabeldragning och grundläggande skydd (t.ex. inga exponerade strömförande delar etc.). Ett kommunikationsprotokoll påverkar inte detta direkt, men indirekt kan ett protokoll som CAN, som låter BMS prata med styrenheten, förbättra säkerheten - t.ex. kan BMS skicka ett kommando om att stoppa urladdningen om batteriet överhettas. Även om det inte är ett krav enligt EN 15194, hjälper den här typen av funktioner en cykel att uppfylla allmänna säkerhetsförväntningar (undvika termiska skenande händelser).
Dessutom kan europeiska lastcyklar (särskilt de som transporterar gods/passagerare) behöva uppfylla kraven i Maskindirektivet om de inte strikt faller under cykelreglerna (vissa tunga lastcyklar gör det). Detta betonar återigen robusta felsäkerheter. Att använda ett stabilt kommunikationsprotokoll med felsäkert beteende (som att CAN stängs av vid fel) kan underlätta efterlevnaden här.
Mer information om EU-standard för elcyklar
Hur kommunikationsprotokoll påverkar elcyklars överensstämmelse i USA
Förenta staterna - UL 2849 och andra: I USA är tillverkningen av e-cyklar lite mindre reglerad på federal nivå när det gäller prestanda (det finns en konsumentproduktdefinition av en låghastighets-e-cykel som 750W max och 20 mph på gas/28 mph på pedalassistans, men inga obligatoriska konstruktionsstandarder federalt). Hur som helst, Säkerhetscertifiering blir allt viktigare, särskilt på grund av brandrisken från batterier.
- UL 2849 är den främsta säkerhetsstandarden för elcyklars elsystem i Nordamerika. Den omfattar hela det elektriska drivsystemet i en elcykel - inklusive batteriet, motorn, laddaren och alla anslutningar. UL 2849-testning tittar på saker som om ledningarna kan hantera strömmarna, om systemet är skyddat mot kortslutningar och, vilket är viktigt, det innehåller också UL 2271 för batterier (som är en batterispecifik säkerhetsstandard). När det gäller kommunikation föreskriver UL 2849 inte något protokoll, men den kontrollerar till exempel att om kommunikationen förloras eller ett fel upptäcks, så misslyckas systemet på ett säkert sätt (inga termiska händelser, ingen skenande motor). Ett CAN-baserat system kan ha en liten fördel när det gäller att bevisa redundans (t.ex. om gasmeddelandet försvinner kan CAN upptäcka det och göra en timeout på lämpligt sätt). Men även UART-system kan utformas så att de uppfyller UL 2849 (de behöver bara noggrann felhantering i styrenhetens firmware).
- Förebyggande av brand och elektriska stötar: Standarder som UL 2849 fokuserar på att förhindra elektriska bränder och stötar. Om en elcykel t.ex. har en laddare ansluten får kommunikationen mellan batteri och laddare (om sådan finns) inte leda till överladdning. Det är särskilt viktigt att EnergyBus-standard som vi nämnde, som är CAN-baserad, motiverades delvis av säkerhetsskäl - att säkerställa att alla laddare säkert kan ladda alla batterier genom att kommunicera via CANopen och endast aktivera ström när korrekt handskakning har gjorts . EnergyBus använder en specifik kontakt som innehåller CAN-datalinjer så att laddaren och batteriet först upprättar kommunikation och sedan tillåter laddningsström, för att undvika gnistor eller felaktiga spänningar. Detta koncept stämmer väl överens med UL:s säkerhetslogik. Om ett varumärke använder EnergyBus hjälper det sannolikt till att klara säkerhetscertifieringar eftersom det i sig hanterar säkra interaktioner mellan komponenter.
- Regelefterlevnad (hastighet/effekt): I USA är klassystemet (klass 1, 2, 3 e-cyklar) till stor del ett hederssystem och inte lika strikt som EU:s gränser, men av ansvarsskäl säkerställer tillverkarna vanligtvis att en e-cykel som säljs som klass 2 inte enkelt kan ändras för att till exempel överskrida 20 mph på gaspedalen. Även här kan det vara till hjälp att använda ett slutet CAN-protokoll - användare kan inte bara koppla in en kabel och ta bort begränsningarna på cykeln. Det är anmärkningsvärt att många elcykelföretag nu annonserar UL-certifierade batterier eller system för att försäkra kunderna om säkerhet. Till exempel betonar HOVSCO (som ses i deras kunskapsbas) att deras cyklar uppfyller UL 2849 för elsäkerhet och EN 15194 för övergripande säkerhetsöverensstämmelse . Detta innebär att deras ledningar, kontakter och kommunikation måste fungera utan att orsaka risker.
Internationella och andra standarder: Förutom EN 15194 och UL 2849 finns det andra relevanta standarder - t.ex, ISO 4210 (cykelsäkerhetsstandard) med en del som täcker kraven för elcyklar, och den tyska DIN 79010 för lastcyklar (som vi noterade, täcker saker som ramstyrka under lastbelastning och bromsprestanda) . Dessa regler styr inte direkt elektroniken, men en standard för lastcyklar kan implicit kräva att t.ex. assistansen inte fungerar dåligt under tung belastning. En robust kommunikation säkerställer att signalerna mellan batteri, styrenhet och sensorer förblir tillförlitliga även om cykeln utsätts för påfrestningar (och kanske elektriska störningar ökar eller batteriet sjunker).
Sammanfattningsvis, efterlevnad och säkerhet styr vissa designbeslut mellan UART och CAN. En tillverkare som strävar efter maximal säkerhet kanske lutar sig mot CAN för dess felkontroll och kontroll, eller implementerar extra skyddsåtgärder på UART-system. Båda protokollen kan vara en del av en säker konstruktion, men det är hur de används som är avgörande. För CAN-systemens slutna karaktär kan tvinga fram efterlevnad (t.ex. hastighetsbegränsningar som inte kan justeras av användarna, vilket krävs enligt lag) , medan UART-system ger större frihet för användaren, vilket är ett tveeggat svärd. Tillverkare måste se till att även UART-baserade cyklar har saker som en fysisk eller mjukvarubegränsare som inte lätt kan hackas, för att hålla sig inom lagliga gränser.
Slutligen, oavsett protokoll, är det viktigt att använda kontakter och ledningar av hög kvalitet är en del av efterlevnaden. Inom EU måste cykeln tåla vibrationer utan att kablarna lossnar, och i våta förhållanden utan kortslutning. Kontaktdon som Higo/Julet (vattentäta kontaktdon som ofta används i elcyklar) är populära inte bara för att de är praktiska utan också för att de bidrar till att uppfylla IP-klassning och tillförlitlighetskrav. En CAN-buss använder vanligtvis sådana kontakter (t.ex. kan en enda Higo 4- eller 5-polig kontakt överföra CAN-data och ström till en display). Valet av protokoll ändrar inte behovet av bra dragavlastning, isolering och låsbara kontakter för att förhindra frånkopplingar (vilket kan vara farligt om t.ex. signalen för bromsavstängning inte når styrenheten på grund av att en kabel har lossnat).
Som avslutning på det här avsnittet kan vi konstatera att både Europa och USA har ett starkt fokus på säkerhet för elcyklar. Att följa standarder som EN 15194 och UL 2849 blir allt viktigare för välrenommerade varumärken. Kommunikationsprotokollet är en pusselbit - ett sätt att säkerställa att det elektriska systemet är samordnat och felsäkert. CAN-bussens tillförlitlighet kan bidra till att uppfylla dessa standarder genom att tillhandahålla robust kommunikation, medan UART-system kräver noggrann design för att vara lika säkra. Tillverkarna väljer ofta det protokoll som bäst överensstämmer med efterlevnadsstrategin: UART för enklare konstruktioner där risken kan hanteras enkelt, eller CAN för komplexa system där säkerhetsfunktionerna är utmärkta.
Kostnader och marknadsöverväganden vid val av kommunikationsprotokoll
När man väljer mellan olika kommunikationsprotokoll (eller i allmänhet utformar en elcykels elsystem) är kostnaden en viktig faktor - inte bara den monetära kostnaden, utan även "kostnaden" i form av flexibilitet och leverantörsrelationer. Så här ser kostnadsjämförelsen ut och vad B2B-köpare eller ingenjörer bör tänka på:
- Kostnad för hårdvara: Som tidigare nämnts använder ett UART-baserat system vanligtvis enklare maskinvara. Styrenheten och displayen behöver bara UART-kapacitet, som praktiskt taget alla mikrokontroller har inbyggd. Kabeldragningen kan vara lite enklare (färre termineringar etc.). Ett CAN-baserat system kräver lite mer: ett CAN-transceiverchip för varje enhet och eventuellt en kraftfullare MCU (även om även ganska billiga MCU:er numera har CAN inbyggt). Den faktiska skillnaden i BOM (Bill of Materials) kan vara i storleksordningen bara några dollar per cykel i hög volym, men på en konkurrensutsatt marknad spelar det fortfarande roll. För en stor cykelflottaorder multiplicerar dessa dollar ut. Med det sagt är kostnaden för CAN-hårdvara har sjunkit och avvägningen kan lätt motiveras av den extra funktionalitet som CAN ger.
- Utvecklings- och integrationskostnader: För en nystartad elcykeltillverkare eller ett litet företag kan det bli kostsamt att utveckla ett CAN-baserat system från grunden om de inte har egen expertis. Det kan handla om att anställa ingenjörer inom inbyggda system som är bekanta med CAN, investera i verktyg och lägga tid på att utveckla anpassad firmware. Om företaget köper ett färdigt system (som Bosch- eller Shimano-drivenheter, som är CAN-baserade) blir utvecklingskostnaden lägre, men enhetskostnaden högre (Bosch-system är dyrare, delvis för att du får en helt integrerad lösning och varumärket). A UART-system kan ofta sättas ihop med hjälp av standardkomponenter med känd kompatibilitet - till exempel använder många företag öppen källkod eller standardprotokoll där mycket av tekniken redan är gjord och risken är lägre. För en B2B-köpare (t.ex. ett företag som vill ha en massa elcyklar under sitt varumärke) kan UART innebära att de kan köpa billigare generiska delar, medan CAN ofta innebär att de måste anpassa sig till en viss leverantörs ekosystem (som kan ta ut licensavgifter eller högre priser).
- Kostnader efter försäljning och underhåll: Detta förbises ibland. En flottoperatör (t.ex. en cykelpool eller ett leveransföretag) kan upptäcka att CAN-busscyklar sparar pengar på underhåll. Varför inte? För att de kan diagnostisera problem på distans eller snabbare. Ett CAN-anslutet system kan rapportera felkoder i detalj (t.ex. "fel på temperatursensorn i batteri #2" som en specifik kod). Teknikerna kan koppla in diagnosverktyg till CAN-bussen för att lokalisera problemen. Detta kan minska arbetstiden. Som vi såg i IoT Venture-fallet är det också möjligt att göra uppdateringar av firmware på distans, vilket kan minska kostnaderna för att fysiskt återkalla cyklar för vissa reparationer. Å andra sidan kan det initiala underhållet av en UART-cykel vara enklare (kanske färre saker som kan gå fel i kommunikationen), men om något är fel kan du behöva prova dig fram genom att byta ut delar eftersom systemet inte kan berätta exakt vad som är fel, förutom att det kanske blinkar med en lysdiod. För en enskild konsument kan en UART-cykel vara billigare att reparera eftersom de kan använda standarddelar och kunskap från samhället för att fixa den, medan en CAN-cykel kan tvinga dem att gå till auktoriserad service (potentiellt dyrare). Så det finns en kostnadsavvägning mellan användarvänlighet (UART-vinster) och avancerat diagnostiskt stöd (CAN vinner, vilket kan sänka kostnaderna för professionella tjänster).
- Licenskostnader och kostnader för äganderätt: Att använda ett proprietärt CAN-protokoll kan innebära licensavgifter eller restriktioner. Om ett cykelmärke utvecklar sitt eget CAN-protokoll är det bra, men om de använder något som CANopen eller EnergyBus kan de behöva följa standarder och eventuellt gå med i föreningar (t.ex. EnergyBus e.V.). Dessa kostnader är i allmänhet små, men de är värda att notera. Egenutvecklade system som Bosch innebär i praktiken att cykeltillverkaren köper drivenheterna som ett paket; Bosch sätter priset. Med UART-system finns det ofta mer konkurrens mellan delleverantörer, vilket kan driva ner priserna.
- Kunduppfattning och värde: Ur ett marknadsföringsperspektiv kan ett varumärke motivera ett högre pris för en cykel som har "CAN-busselektronik av fordonsstandard" eftersom det låter avancerat och tillförlitligt (även om kunden inte direkt ser skillnaden). Det finns ett värde i premiumkänsla och prestanda som CAN-system ofta kommer med (de sitter vanligtvis på cyklar som också har högkvalitativa motorer etc.). Så varumärken som riktar sig till den mer avancerade marknaden eller kommersiella kunder kan utnyttja CAN som en del av ett premiumerbjudande. När det gäller elcyklar i nybörjarsegmentet bryr sig kunderna däremot mest om att det fungerar och att det är prisvärt - de kommer inte att betala extra bara för att cykelns display använder CAN istället för UART. Det är så det är, valet av protokoll bör anpassas till cykelns marknadssegment.
- Framtidssäkring: En kostnad som ingenjörer tar hänsyn till är alternativkostnaden för att inte vara framtidssäkrad. Om du investerar i en UART-baserad plattform nu och nästa år vill lägga till fler funktioner (t.ex. ett andra batteri eller en ny typ av givare), kan det hända att den gamla plattformen blir begränsande och att du måste göra om den. Vissa företag anser att det är mer kostnadseffektivt i det långa loppet att välja CAN från början, även om det inte utnyttjas fullt ut, för att lämna utrymme för nya funktioner och tillbehör. Detta kan spara in på ombyggnadskostnader längre fram. Det är ett strategiskt beslut: betala lite mer i förskott jämfört med att potentiellt betala mycket mer senare för att uppgradera.
När det gäller faktiska prisuppgifter: det är svårt att fastställa, men en branschkännare kan till exempel säga att en grundläggande UART-kontroller för e-cyklar + display kan kosta $50-$100 i bulk, medan en motsvarande CAN-baserad uppsättning från ett stort varumärke kan kosta några hundra dollar (eftersom den är mer sofistikerad). Men den skillnaden inkluderar ofta också bättre motorprestanda, garanti etc., inte bara kommunikationsskillnaden. Den inkrementell kostnad enbart för protokoll (t.ex. genom att lägga till ett CAN-chip) är liten, men ekosystemkostnad (kopplat till ett dyrt system jämfört med ett billigt generiskt system) kan vara stort.
För att uttrycka det enkelt för en B2B-köpare av elcyklar:
- Om din prioritet är lägsta enhetskostnad och du vill ha flexibilitet att köpa från flera leverantörer, kan en UART-baserat öppet system är attraktiv. Du kan leta efter displayer och styrenheter som passar ihop och kanske till och med förhandla med flera fabriker.
- Om din prioritet är prestanda, tillförlitlighet och ett nyckelfärdigt system (och du är villig att betala för det), en CAN-baserat system från en välrenommerad leverantör kan spara dig huvudvärk och ge mervärde till din produkt (till en högre kostnad, som du förhoppningsvis tjänar in genom att prissätta dina cyklar högre eller genom volymeffektivitet).
Begränsningar och framtida trender
Även om vi hyllar fördelarna med UART och CAN är det värt att notera att begränsningar i det nuvarande läget för kommunikation om elcyklar och vart saker och ting kan vara på väg:
- Brist på standardisering inom hela branschen: Till skillnad från bilvärlden, där nästan alla bilar använder CAN-buss och standardiserad diagnostik (OBD-II), är elcykelbranschen fortfarande fragmenterad. Det finns inget enda universellt protokoll som alla elcyklar använder. UART-implementeringarna varierar (varje tillverkare kan ha olika dataformat över UART) och CAN-implementeringarna är ofta proprietära. Detta är en begränsning för konsumenter och cykelmontörer - det är inte "plug and play" mellan olika märken. Du kan inte ta en slumpmässig display och förvänta dig att den ska fungera med en slumpmässig styrenhet om de inte uttryckligen använder samma protokoll och firmware. EnergiBuss är ett lovande försök till standardisering (med CANopen CiA-454 som definierar meddelanden för elcykelkomponenter), men det är ännu inte genomgripande. Om EnergyBus eller liknande standarder får fäste kan vi få se verkligt driftskompatibla komponenter - till exempel kan ett batteri från tillverkare X användas med ett motorsystem från tillverkare Y, där det CANopen-baserade protokollet säkerställer att de förstår varandra. Detta skulle gynna B2B-köpare (fler leverantörsalternativ) och konsumenter (fler uppgraderings-/reparationsalternativ). Men branschaktörerna har också affärsmässiga motiv för att behålla proprietära system (för att låsa in kunderna). Spänningen mellan standardisering kontra egenkontroll kommer att forma framtiden för protokoll för elcyklar.
- Bandbredd och databehov: För närvarande är kommunikationen från elcyklar relativt datafattig. Men framtida elcyklar kan komma att strömma mer information - tänk dig att samla in högfrekventa momentgivardata eller högupplösta effektmått för utbildningsändamål, eller till och med video från kameror för säkerhets skull. CAN med klassiska hastigheter kan bli en flaskhals om mycket data ska skickas. För fordonsindustrin finns CAN-FD (en utökad version av CAN med större dataramar och högre genomströmning) och andra protokoll som Ethernet för behov av hög bandbredd. För elcyklar kan CAN-FD så småningom dyka upp om det behövs, eller BLE/Wi-Fi för avlastning av dataloggar. Trådlös kommunikation kan också komplettera kabelanslutna protokoll: många elcyklar använder redan Bluetooth Low Energy för att ansluta cykeln till en smartphone-app. Det ligger utanför det interna elsystemets räckvidd, men är värt att notera som en parallell kanal. I framtiden kanske vissa enklare elcyklar till och med kan avstå från en trådbunden display och använda en trådlös modul till en telefon - även om kritisk styrning (som gas- eller bromssignaler) troligen kommer att förbli trådbunden av tillförlitlighetsskäl. I lastflottor kan vi komma att se mer integration av V2X-kommunikation (fordon-till-allt) - e-cyklar som pratar med logistiksystem eller trafikinfrastruktur, som återigen skulle läggas ovanpå det centrala CAN-bussystemet.
- Säkerhetsfrågor: I takt med att elcyklar blir uppkopplade och använder mer komplex kommunikation, cybersäkerhet blir ett problem. Ett UART-system utan externa anslutningsmöjligheter är praktiskt taget immunt mot hackning (någon måste fysiskt knacka sig in i ledningarna). Men en CAN-buss som har gränssnitt mot en Bluetooth-modul eller en GSM-modul (för spårning av fordonsparken) innebär potentiella sårbarheter. Tillverkarna måste se till att deras protokoll (särskilt trådlösa gränssnitt till bussen) är säkra för att förhindra skadlig kontroll (tänk dig ett IoT-hack som skulle kunna stänga av en flotta av leveranscyklar på distans - ett långsökt men teoretiskt möjligt scenario om det inte är säkrat). Proprietära protokoll är till sin natur något säkra genom att de är dolda, men i takt med att CAN blir allmänt känt i elcyklar kan illasinnade aktörer försöka injicera CAN-meddelanden via en exponerad port. Därför kan vi komma att se mer kryptering eller autentisering i kommunikationen med elcyklar i framtiden.
- Användarupplevelse: Oavsett vilket protokoll som används ska det i slutändan ge en bra användarupplevelse. Förare bryr sig om saker som jämn kraftöverföring, korrekt information på displayen och att säkerhetsfunktionerna fungerar när de behövs. En begränsning i de tidiga CAN-baserade systemen var att de ibland var också låst - användarna kände sig frustrerade över att de inte ens kunde ändra enkla preferenser. I takt med att systemen mognar kan tillverkarna hitta sätt att ge användarna flexibilitet (via godkända appar eller inställningar) utan att äventyra kontrollen. Till exempel kanske en app kan tillåta begränsad tuning (inom säkra gränser) även på ett CAN-system, eller tillåta tillbehör från tredje part som är certifierade att kommunicera på bussen (kanske med hjälp av EnergyBus-standardmeddelanden). Vi kan förvänta oss lite mer öppenhet i takt med att protokollen standardiseras, ironiskt nog även i en CAN-värld.
Avslutningsvis Elcyklarnas elektriska kommunikationssystem - oavsett om det är UART eller CAN - är avgörande för cykelns prestanda, säkerhet och modularitet. Ingenjörer som konstruerar elcyklar måste väga UART:s enkelhet mot CAN:s sofistikerade egenskaper. B2B-köpare måste överväga hur valet påverkar kostnaden, leveranskedjan och produktens värdeerbjudande. Branschen verkar gå mot CAN-buss i takt med att elcyklarna utvecklas till mer uppkopplade och kapabla maskiner, men UART-baserade system kommer sannolikt att fortsätta att användas parallellt för enklare modeller till lägre kostnad under en tid (de är trots allt "tillräckligt bra" för ett stort segment av cyklister).
Genom att förstå dessa kommunikationsprotokoll - i huvudsak de Elektriskt språk av elcyklar - får man en mycket djupare förståelse för hur en elcykel fungerar internt. Från vridningen av gasreglaget eller trycket på pedalen, till motorns kraft och siffrorna på displayen, allt möjliggörs av bits och bytes som far fram längs kablar och ser till att batteri, motor och förare är synkroniserade. Och oavsett om det handlar om en elegant stadscykel eller ett tungt lastfordon är det den harmonin som gör att resan känns enkel och säker. I slutändan är målet med alla protokoll att få tekniken att försvinna i bakgrunden så att förarna helt enkelt kan njuta av resan - men nu förhoppningsvis med lite insikt i den imponerande elektroniska samordning som sker under deras fötter.
Källor:
- Qiolor Guide för elcyklar "Så här väljer du en kompatibel display till din styrenhet för elcykel" (2025) - diskutera UART vs CANBUS-språk och vikten av att matcha protokoll.
- Velco.tech - "CAN vs UART: skillnader mellan olika kommunikationslägen" (2024) - förklara UART:s enkelhet jämfört med CAN:s nätverksfunktioner och lista deras fördelar/begränsningar .
- Biktrix hjälpcenter "Vad är CANBUS- och UART-protokollen?" - användarcentrerad syn på hur CAN låser inställningar (fast hastighetsgräns) vs UART tillåter modifieringar, plus en jämförelse av skärmens utbytbarhet.
- IoT Venture (fallstudie med CYCLE-flottan) - beskriver fördelarna med CAN-integration i e-cykelflottor: tillgång till underhållsdata, fjärrstyrning av motorn, OTA-uppdateringar .
- Kunskap om HOVSCO "Vilka säkerhetsfunktioner har elcyklar?" - noteringar om EN 15194 (EU) som säkerställer hastighets- / effektgränser och hållbarhet, och UL 2849 (US) med fokus på elektrisk / brandsäkerhet , samt omnämnande av DIN 79010 för lastcykelsäkerhet .
- Texas Instruments App Note - (på engelska) "Överväganden om hårdvarudesign för en elektrisk cykel med BLDC-motor" - gav typiska blockscheman för elcykelsystem och insikt i styrelektronik.
- Letrigo Kunskap om elcyklar "E-bike Display Wiring förklaras" - detaljer om kabeldragning, kontakter (Higo/Julet) och varnar för att det inte finns någon universell kabeldragningsstandard, med betoning på korrekt matchning av anslutningar och robust kabeldragning för signalintegritet .
- EnergyBus Standard - Introduktion från Kvaser - beskriver EnergyBus som en öppen CANopen-baserad standard för LEV-komponenter för att säkerställa kompatibilitet och säkerhet mellan olika tillverkare.




