
Elektrická kola (elektrokola), včetně nákladních elektrokol, jsou založena na složitém elektrickém systému, který propojuje baterii, motor, řídicí jednotku, senzory a uživatelské rozhraní. Komunikační protokoly tohoto systému slouží jako "jazyk", který umožňuje bezproblémovou koordinaci všech těchto součástí. V tomto populárně-naučném přehledu vysvětlíme, co jsou to komunikační protokoly a jak fungují v rámci elektrických systémů elektrokol. Budeme se zabývat typy používaných protokolů, jejich rozdíly, místy použití jednotlivých protokolů, jejich výhodami a nevýhodami, finančními aspekty, souladem s bezpečnostními normami v EU a USA a omezeními. Cílem je poskytnout našim zákazníkům a posluchačům jasného a autoritativního průvodce , který bude vyvažovat technickou hloubku s praktickým porozuměním.
Klíčové součásti elektrokola - "nervový systém"
Elektrokola si lze představit jako centrální nervovou soustavu kabelů a datových spojů, které propojují všechny důležité komponenty. Stejně jako nervy přenášejí signály v těle, kabelový svazek přenáší napájecí i datové signály v celém motocyklu . Mezi klíčové součásti typického elektrického systému elektrokola patří:

- Bateriový balíček: Zdroj stejnosměrného proudu (obvykle 36-48 V), který dodává energii do systému. Připojuje se k řídicí jednotce pomocí silných napájecích kabelů (s pojistkami nebo jističi pro zajištění bezpečnosti) a dodává hlavní proud. Některé pokročilé akumulátory mají také datové spojení (prostřednictvím komunikačních linek) pro sdílení stavových nebo řídicích signálů s řídicí jednotkou.
- Motor a řídicí jednotka: Motor (nábojový motor v kole nebo středový pohon na klice) přijímá energii z řídicí jednotky motoru, která je "mozkem" regulujícím výkon motoru na základě vstupů od jezdce a zpětné vazby od senzorů. Řídicí jednotka je elektronická jednotka s mikroprocesorem, která přijímá signály (plyn, snímač šlapání, brzdy atd.) a řídí napájení motoru. Motory mají obvykle fázové vodiče (těžké kabely přenášející napájení) a senzorové vodiče (tenké kabely ze snímačů s Hallovým jevem, které poskytují zpětnou vazbu o poloze rotoru) vedoucí k řídicí jednotce .
- Lidské rozhraní (plynová páka, pedálový snímač, displej): Jezdec komunikuje s elektrokolem prostřednictvím zařízení, jako je plynová páka (často rukojeť na řídítkách s Hallovým snímačem, který vysílá proměnný napěťový signál pro požadavek rychlosti) a snímač asistence šlapání (PAS), který detekuje pohyb šlapání pomocí magnetů a senzorů. Zobrazovací jednotka na řídítkách zobrazuje rychlost, úroveň nabití baterie, úroveň asistence atd. a často obsahuje tlačítka, kterými jezdec upravuje nastavení. Displej a řídicí jednotka si vyměňují data prostřednictvím vícevodičového kabelu včetně napájecího a komunikačního vedení .
- Bezpečnostní pojistky (brzdové páky): Brzdové páky elektrokol jsou obvykle vybaveny vypínači, které vysílají signál do řídicí jednotky, aby při brzdění okamžitě přerušila výkon motoru. Obvykle se k tomu používá jednoduchý dvouvodičový obvod, který funguje jako signál zapnuto/vypnuto pro řídicí jednotku .
- Osvětlení a příslušenství: Mnoho elektrokol má také integrovaná přední/zadní světla, klakson, USB nabíječky atd. Ty mohou být řízeny hlavní řídicí jednotkou nebo fungovat na samostatných obvodech, ale ve špičkových systémech mohou být adresovány i prostřednictvím komunikační sběrnice.
Podrobného průvodce příslušenstvím pro elektrokola a nákladní kola najdete na adrese. přečtěte si tento článek, kde najdete podrobnější odpověď. nebo se podívejte na naše Nákladní kolo 101 stránka.
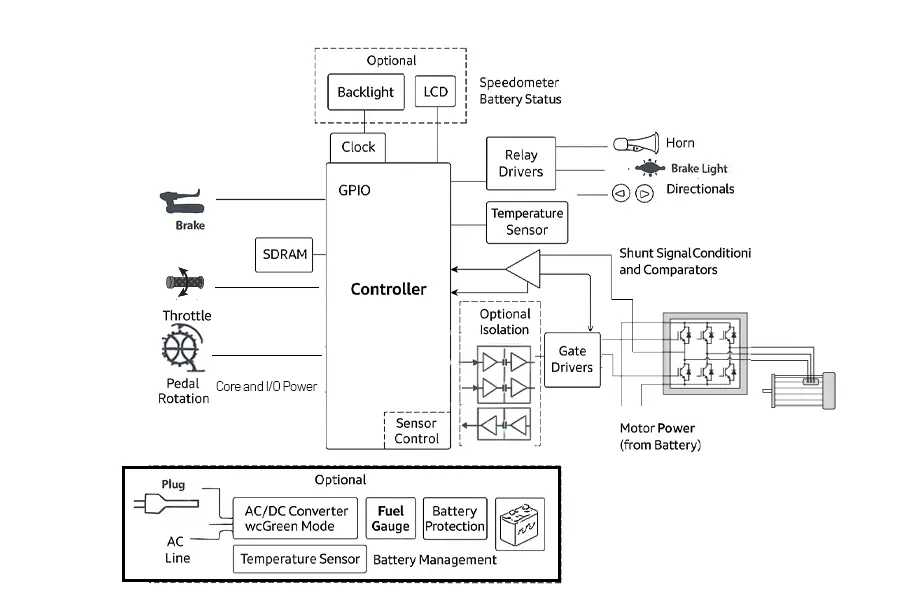
Obrázek 2: Blokové schéma typického systému řízení elektrického jízdního kola a správy baterie. Centrální řídicí jednotka komunikuje s klíčovými vstupy - škrticí klapkou, snímači pedálů, brzdovými pákami - a spravuje výstupy, jako jsou signály pohonu motoru, prostřednictvím ovladačů hradel, ovladačů relé a připojení GPIO. Volitelné moduly, jako jsou displeje LCD, nabíječky baterií, palivoměry a podsvícení, rozšiřují funkčnost systému. Komunikace mezi komponentami podporuje koordinaci napájení motorů, osvětlení, bezpečnostních odpojení a sledování stavu baterie v reálném čase.
Jaké jsou komunikační protokoly elektrokol?
V kontextu elektrokol se komunikačními protokoly rozumí způsob a formát, jakým si elektronické komponenty vyměňují data. Raná nebo základní elektrokola často neměla složitou digitální síť - mnoho signálů bylo analogových nebo šlo o jednoduché zapínací a vypínací obvody. Například plynová páka vysílá analogové napětí, které signalizuje, kolik výkonu chce jezdec, a brzdový spínač jednoduše otevírá nebo uzavírá obvod pro přerušení výkonu . Jak se však elektrokola stávala sofistikovanějšími - s chytrými displeji, pokročilými senzory a dokonce i integrací GPS nebo chytrého telefonu - vznikla potřeba robustnější digitální komunikace.
V současné době převládají v systémech elektrokol dva základní digitální komunikační protokoly:
- UART (univerzální asynchronní přijímač a vysílač): Sériová komunikační metoda, která vytváří přímé datové spojení jedna ku jedné mezi dvěma zařízeními (obvykle řadičem a displejem).
- Sběrnice CAN (Controller Area Network): Síťový protokol, který umožňuje, aby více zařízení (řídicí jednotka, displej, BMS baterie, senzory atd.) komunikovalo po stejných vodičích sběrnice.
Kromě UART a sběrnice CAN se v systémech elektrokol příležitostně používají dva další komunikační protokoly:
- SIF (Serial Interface Format): Jedná se o proprietární nebo zjednodušený protokol, který se běžně vyskytuje v některých značkových systémech (např. Shimano STEPS nebo starší zobrazovací jednotky). Obvykle se používá pro základní výměnu dat mezi řídicí jednotkou a displejem nebo dálkovými tlačítky. Protože SIF postrádá otevřenou standardizaci a flexibilitu, je většinou omezen na konkrétní značky nebo starší modely.
- RS-485 (doporučená norma 485): RS-485 je průmyslový sériový komunikační protokol, který je známý svou spolehlivostí a odolností proti šumu na dlouhé vzdálenosti. Ačkoli není tak běžný jako UART nebo CAN ve spotřebních elektrokolech, objevuje se v některé špičkové nebo komerční flotilové systémy, zejména tam, kde je vyžadována robustnost a rozšířená kabeláž - například u sdílených kol, vozových parků půjčoven nebo těžkých elektrokol.
Tyto protokoly jsou v podstatě "jazyky" elektroniky elektrokola. Pokud všechny komponenty mluví stejným jazykem, informace proudí správně; pokud ne, zařízení si nebudou rozumět. Proto je například při párování displeje s řídicí jednotkou velmi důležité sladit protokol. I když zástrčka sedí, nekompatibilita protokolu znamená, že součásti nebudou fungovat společně .
Přehled využití trhu (odhadované trendy v letech 2024-2025)
Ačkoli neexistuje žádné všeobecně publikované rozdělení protokolů používaných na trhu s elektrokoly, na základě poznatků z oboru a od hlavních dodavatelů systémů (např. Bosch, Bafang, Shimano, Mahle atd.) je možné uvést následující přiměřené odhadované rozdělení od roku 2025:
| Protokol | Podíl využití (odhadovaný) | Běžné aplikace | Poznámky |
|---|---|---|---|
| UART | ~50-60% | Elektrokola základní až střední třídy | Široké využití díky jednoduchosti a nízké ceně. |
| Sběrnice CAN | ~30-35% | Špičková, chytrá nebo modulární elektrokola | Zvyšující se přijetí díky inteligentní integraci |
| RS-485 | ~5-10% | Flotilové systémy, dlouhé kabelové komerční sestavy | Omezeno na konkrétní případy použití |
| SIF / Proprietární | <5% | Specifické nebo starší systémy | Většinou se vyskytují ve starších nebo uzavřených ekosystémech. |
Poznámka: Tyto údaje jsou zobecněny pro globální trhy (EU, CN, NA) a vycházejí z trendů OEM, veřejné dokumentace, údajů o demontáži a poznatků dodavatelů komponent.
Definujte komunikační protokoly pro elektrokola jednodušším způsobem :
Zjednodušeně řečeno, komunikační protokoly v elektrokolech vypadají následovně. jazyky nebo pravidla, která umožňují různým elektronickým součástem vzájemně komunikovat.. Pokud komponenty nemluví stejným jazykem, nemohou si rozumět - i když si fyzicky odpovídají.
📞 Analogie: Hovor jeden na jednoho vs. skupinový chat
Představme si dva způsoby komunikace v každodenním životě, abychom pochopili protokoly elektronických kol:
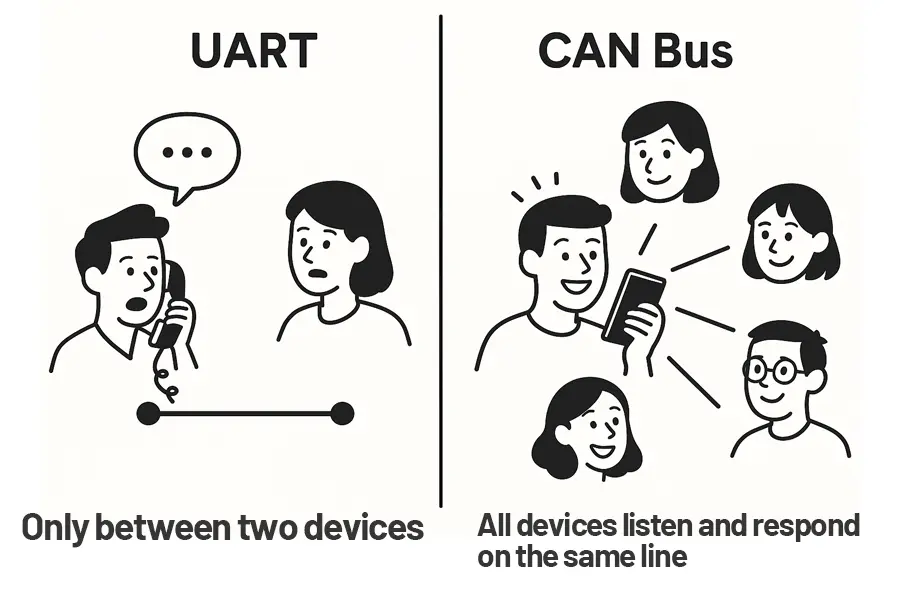
UART: jako telefonní hovor mezi čtyřma očima
- UART (Universal Asynchronous Receiver-Transmitter) je jako volání jednomu příteli po telefonu.
- Pouze dvě zařízení mohou mluvit najednou - jako váš displej a ovladač.
- Chcete-li komunikovat s jiným zařízením, musíte další drát (nebo další telefonát).
- Je to jednoduché, ale není to škálovatelné, pokud máte mnoho zařízení.
- Běžný v základní systémy pro elektrokola s omezenými funkcemi.
AN Bus: Jako skupinový chat
- Sběrnice CAN (Controller Area Network) je jako skupinový chat na WhatsApp nebo WeChat.
- Všechna zařízení (řídicí jednotka, baterie, displej, senzor, světla) jsou ve stejné chatovací místnosti.
- Každá zpráva je označena ID odesílatele a každé zařízení čte pouze zprávy, které jsou mu určeny.
- Je to mnohem efektivnější a je ideální, když je třeba, aby spolu spolupracovalo mnoho komponent.
- Používá se v chytré a pokročilé systémy pro elektrokola, často s GPS, Bluetooth a integrací aplikací.
| Funkce | UART (telefonní hovor) | Sběrnice CAN (skupinový chat) |
|---|---|---|
| Typ připojení | One-to-one (bod-bod) | One-to-many (sdílená sběrnice) |
| Škálovatelnost | Nízká - potřebuje další kabely pro více zařízení | Vysoká - více zařízení sdílí stejné vodiče |
| Komunikační tok | Pouze mezi dvěma zařízeními | Všechna zařízení poslouchají a odpovídají na stejné lince |
| Složitost | Jednoduché | Složitější, ale výkonnější |
| Případ použití | Základní elektrokola (pouze displej ↔ řídicí jednotka) | Chytrá elektrokola s BMS, aplikací, senzory atd. |
Úloha komunikačních protokolů
Komunikační protokoly v elektrokolech slouží k několika důležitým účelům:
- Sdílení dat: Umožňují řídicí jednotce odesílat údaje v reálném čase na displej (rychlost, stav nabití baterie, chybové kódy) a přijímat zpět příkazy (např. změna úrovně asistence, zapnutí/vypnutí světel). Bez správného protokolu se může stát, že nebudete mít spolehlivé údaje o rychlosti nebo nebudete moci upravit nastavení.
- Koordinace složek: V pokročilých systémech je třeba koordinovat více mikrokontrolérů. Například inteligentní baterie s vlastním systémem správy baterií (BMS) může komunikovat s řídicí jednotkou motoru, aby se zabránilo nadměrnému proudu nebo aby se zobrazilo přesné procento baterie. Sběrnice CAN nebo podobná síť umožňuje baterii, řídicí jednotce motoru, displeji a dokonce i senzorům sdílet informace v síti s více uzly.
- Bezpečnost a spolehlivost: Dobře navržený protokol zajistí, že v případě poruchy nebo ztráty signálu (například poškození kabelu) to systém zjistí a provede bezpečnou akci (například přerušení napájení motoru). Robustní protokoly, jako je CAN, zahrnují kontrolu chyb a prioritizaci zpráv, aby se s tím vypořádaly . Jednodušší analogové signály takové ošetření chyb postrádají - pokud se uvolní vodič plynu, řídicí jednotka může šum nesprávně interpretovat jako signál plynu, pokud nejsou zavedena bezpečnostní opatření.
- Rozšiřitelnost: U elektrokol s bohatou funkční výbavou (GPS trackery, imobilizéry proti krádeži, více asistenčních senzorů atd.) usnadňuje komunikační síť přidávání nebo odebírání zařízení. Místo toho, aby každé nové zařízení potřebovalo zvláštní kabelové spojení s řídicí jednotkou, může se zařízení připojit ke společné sběrnici a sdílet data se všemi ostatními. Tato škálovatelnost je hlavním důvodem, proč moderní špičková elektrokola přecházejí na sběrnici CAN .
Komunikační protokol je základem elektrického systému elektrokola a zajišťuje, aby všechny elektronické součásti pracovaly v souladu. V dalším příspěvku se budeme věnovat dvěma hlavním typům protokolů (UART a CAN) a prozkoumáme, jak každý z nich funguje a jaké jsou jejich případy použití v elektrokolech a nákladní elektrokola. zkontrolujte, zda máte zájem:
- "Porozumění UART v elektronických kolech: Jak jednoduchá sériová komunikace pohání vaši jízdu"
- Příručka pro začátečníky o tom, jak UART umožňuje základní výměnu dat mezi součástmi elektrokol, jako jsou displeje a řadiče.
- "Co je sběrnice CAN v elektrokolech? Chytřejší způsob připojení baterií, senzorů a dalších zařízení"
- Zjistěte, jak moderní elektrokola využívají sběrnici CAN pro komunikaci s více zařízeními, pokročilé displeje a diagnostiku systému.
Scénáře použití: Který komunikační protokol pro které elektrokolo?
Je užitečné pochopit, jak se v praxi volí UART a CAN pro různé konstrukce elektrokol. Budeme se zabývat dvěma širokými kategoriemi: elektrokola pro spotřebitele (včetně typických kol pro dojíždění do práce nebo pro volný čas). a nákladní/flotilová elektrokola (často používaná pro firemní dodávky nebo půjčovnami).s tím, že tyto priority se často liší.

- Standardní spotřební elektrokola (městská, horská, silniční elektrokola): Tato kola si mnozí jednotlivci kupují pro osobní použití. Jejich nabídka sahá od základních až po velmi špičkové modely. V nižší třídě (modely citlivé na cenu) je komunikace UART velmi běžná. Například jednoduché 36V dojížďkové elektrokolo se snímačem kadence šlapání a základním LED displejem pravděpodobně používá UART (nebo dokonce analogové signály) mezi řídicí jednotkou a jakýmkoli minimálním displejem. Zde se zaměřujeme na nákladová efektivita a základní funkčnost. Mnoho takových kol používá široce dostupné řadiče a displeje, které de facto dodržují protokol UART, což znamená, že značky kol mohou dodávat komponenty od různých výrobců OEM. To je atraktivní pro B2B kupující, kteří chtějí flexibilně používat například hezčí displej od prodejce A s řadičem od prodejce B - pokud oba mluví UART ve stejném formátu, může to fungovat (i když je třeba ověřit kompatibilitu vývodů a firmwaru). U spotřebních kol vyšší třídy, zejména u kol velkých značek, je trendem sběrnice CAN. Vysoce výkonná kola e-MTB nebo e-road se snímači točivého momentu a efektními displeji mohou používat sběrnici CAN, aby bylo možné vše hladce integrovat. Některé značky však stále používají UART nebo jiné proprietární sériové linky i u špičkových kol; liší se to podle výrobce a jeho konstrukční filozofie.

- Nákladní elektrokola a komerční flotily: Nákladní elektrokola jsou určena k přepravě těžkých nákladů nebo cestujících a často je využívají podniky (doručovací služby, poštovní kola atd.). Tato kola mají tendenci upřednostňovat robustnost, bezpečnost a možnosti správy vozového parku nad náklady na elektroniku. V tomto segmentu se sběrnice CAN skutečně prosadila. Například nákladní kola mohou mít duální baterie prodloužení dojezdu - správa dvou baterií vyžaduje komunikaci pro vyrovnávání vybíjení nebo alespoň hlášení stavu každé z nich. CAN usnadňuje komunikaci jedné řídicí jednotky se dvěma jednotkami BMS (jedna v každé baterii) na stejné sběrnici. Nákladní kola mohou mít také další příslušenství: brzdová světla, směrová světla, dokonce i elektronické zámky - jejich koordinace prostřednictvím centrální sběrnice zjednodušuje zapojení a ovládání. Kromě toho, protože nákladní elektrokola jsou často provozována ve flotilách, společnosti by rády měly k dispozici telematika na nich: GPS trackery, které mohou hlásit polohu kola, jeho používání a případné závady. V případě systému s podporou CAN může telematický modul jednoduše odposlouchávat zprávy CAN o rychlosti, stavu baterie atd. a tyto informace odesílat. Jedna případová studie s evropskou flotilou dodávek ukázala, že napojení na sběrnici CAN umožňuje vzdálené sledování údajů o údržbě (např. ujetých kilometrů), vzdálené vypnutí motoru pro ochranu proti krádeži a aktualizace firmwaru motocyklu přes vzduch - funkce velmi užitečné pro správu vozového parku. To by bylo u kola s rozhraním UART obtížně realizovatelné.
- Smíšené vs. integrované systémy: Pokud chce značka elektrokol volně kombinovat komponenty nebo umožnit dodatečné upgrady, drží se systémů založených na UART. Viděli jsme, že Systémy UART umožňují snadnou výměnu displejů nebo úpravu nastavení motoru.. Menší společnost vyrábějící elektrokola by mohla dát přednost této cestě, aby se vyhnula vázanosti na jednoho dodavatele - může změnit dodavatele motoru/kontroléru, aniž by změnila celý ekosystém, pokud protokol zůstane UART a může přizpůsobit firmware. Na druhou stranu, značky zaměřené na optimalizaci systému a dodržování předpisů často volí CAN. Například elektrokola poháněná společností Bosch používají sběrnici podobnou CAN (Bosch má vlastní protokol založený na CAN), která propojuje motor, displej a baterii. Tím je zajištěno, že žádné díly třetích stran se nemohou vzájemně ovlivňovat; vše je přesně sladěno dohromady. Výhodou je vynikající spolehlivost a bezpečnost - systém vyhodí chybu, pokud něco neodpovídá specifikaci. Nevýhodou je, že jako kupující B2B (jako OEM výrobce jízdních kol, který si vybere Bosch) se zavazujete k nákupu motoru, řídicí jednotky, baterie, displeje a dalších zařízení. vše od společnosti Bosch jako balíček.
- Nákladní kola - specifické aspekty: Nákladní kola, zejména v EU, často podléhají přísnější kontrole, protože mohou převážet těžší náklad nebo dokonce cestující. Například v Německu existuje norma (DIN 79010) speciálně pro bezpečnost nákladních kol (především mechanické aspekty, jako je pevnost rámu a brzdy). Tato norma sice nepředepisuje komunikační protokoly, ale myšlení zaměřené především na bezpečnost v nákladních kolech podporuje používání protokolu, který může například zajistit, že pokud se něco pokazí (přehřátí motoru nebo slabá baterie), systém to může sdělit a přijmout opatření. Robustnost CAN a schopnost ošetřit chyby pomáhají splnit tyto bezpečnostní cíle. Nákladní elektrokola se navíc často pohybují v městském prostředí (dodávky ve městech), kde je mnoho rádiového/elektrického šumu a kde je v sázce mnoho, pokud dojde k chybě v komunikaci v nesprávný okamžik. Na stránkách . odolnost CAN proti šumu je zde velkou výhodou, protože zabraňuje nedorozumění, které by mohlo vést k nevyzpytatelnému chování.


Bezpečnostní normy a soulad elektrického systému (EU/USA)
Bez ohledu na použitý komunikační protokol musí elektrické systémy elektrokol dodržovat bezpečnostní normy, aby byl zajištěn jejich bezpečný a legální provoz, zejména na klíčových trzích, jako je Evropa a Spojené státy. Komunikační protokol může nepřímo ovlivnit soulad kola s předpisy - například protokol, který umožňuje neomezené úpravy ze strany uživatele, může představovat riziko pro soulad s předpisy, zatímco protokol, který je uzamčený, může pomoci zajistit, aby kolo zůstalo v zákonných mezích. Rozebereme si příslušné normy a jejich vzájemný vztah:
Jak komunikační protokoly ovlivňují shodu ebike v Evropské unii
Evropská unie (EU) - EN 15194: V EU je většina elektrokol (jízdních kol s výkonem motoru <= 250 W a asistencí při rychlosti 25 km/h) klasifikována jako EPAC (elektronicky podporované cykly). Standardní EN 15194 se vztahuje na EPAC a definuje požadavky a zkušební metody pro bezpečnost a výkonnost . To zahrnuje mechanickou bezpečnost (brzdy, rám atd.) a elektrickou bezpečnost (elektroinstalace, elektromagnetická kompatibilita atd.), jakož i zajištění toho, aby kolo splňovalo rychlostní a výkonové limity.
- Pro komunikační protokoly je důležitým aspektem. elektromagnetická kompatibilita (EMC): systém by neměl vyzařovat nadměrné rušení nebo být rušením nepřiměřeně ovlivňován. Dobře navržená komunikační linka CAN nebo UART by měla projít testy EMC (norma EN 15194 odkazuje na normu EN 55014 nebo podobnou pro EMC). Na adrese odolnost systému CAN proti hluku může být výhodou pro splnění těchto požadavků EMC, protože se ze své podstaty lépe vypořádává s šumem, ale systémy UART mohou také vyhovět, pokud jsou správně stíněné.
- Manipulace s rychlostí a výkonem: Norma EN 15194 vyžaduje, aby se asistent vypnul při rychlosti 25 km/h a aby uživatel nemohl tuto hranici snadno nastavit nad zákonnou hodnotu. Pokud kolo používá UART a výrobce ponechává přístupné programovací podložky, může uživatel mohl případně jej omezit - to by mohlo vyvolat problémy s dodržováním předpisů. Někteří výrobci proto používají uzamčené systémy CAN, aby uživatelům zabránili ve změně rychlostního limitu. Například motory Bafang s rozhraním CAN mají omezení rychlosti pevně nastavené a nelze je měnit prostřednictvím displeje , což pomáhá zajistit soulad s předpisy hned po vybalení. Naproti tomu u mnoha systémů UART může zdatný uživatel vstoupit do režimu nastavení na displeji a upravit velikost kola nebo limit, případně použít programovací kabel, čímž může porušit literu zákona, pokud způsobí, že kolo překročí asistenční rychlost 25 km/h.
- Elektrická bezpečnost: Norma EN 15194 (poslední revize) se zabývá základní elektrickou bezpečností, ale zajímavé je, že se plně nevztahuje na bezpečnost baterií - předpokládá, že samotný akumulátor bude splňovat další normy. Zaměřuje se spíše na integraci, zapojení a základní ochranu (např. žádné odkryté živé části atd.). Komunikační protokol na to nemá přímý vliv, ale nepřímo může protokol jako CAN, který umožňuje systému BMS komunikovat s řídicí jednotkou, zvýšit bezpečnost - např. systém BMS může poslat příkaz "zastavit vybíjení", pokud se baterie přehřívá. Ačkoli to norma EN 15194 nepředepisuje, tento druh funkce pomáhá motocyklu splnit obecná bezpečnostní očekávání (zabránění tepelnému vyčerpání).
Kromě toho by evropská nákladní elektrokola (zejména ta, která přepravují zboží/cestující) mohla splňovat požadavky na Směrnice o strojních zařízeních pokud nespadají striktně pod pravidla pro jízdní kola (některá těžká nákladní kola ano). To opět klade důraz na robustní pojistky proti selhání. Použití spolehlivého komunikačního protokolu se zabezpečením proti selhání (např. vypnutí CAN při poruše) může pomoci při dodržování předpisů.
Více informací o Norma EU pro elektrokola
Jak komunikační protokoly ovlivňují shodu s předpisy pro ebike ve Spojených státech?
Spojené státy americké - UL 2849 a další: V USA je výroba elektrokol na federální úrovni trochu méně regulována, pokud jde o výkon (existuje definice spotřebitelského výrobku jako nízkorychlostního elektrokola s maximálním výkonem 750 W a rychlostí 20 mph na plyn/28 mph na asistenci pedálů, ale žádné povinné konstrukční normy na federální úrovni). Nicméně, bezpečnostní certifikace se stává klíčovou, zejména kvůli obavám z požáru baterií.
- UL 2849 je hlavní bezpečnostní norma pro elektrické systémy elektrokol v Severní Americe. Vztahuje se na celý elektrický pohonný systém elektrokola - včetně baterie, motoru, nabíječky a všech propojení. Testování podle normy UL 2849 se zabývá například tím, zda elektroinstalace zvládne proudy, zda je systém chráněn proti zkratu, a co je důležité, zahrnuje také UL 2271 pro baterie (což je bezpečnostní norma specifická pro baterie). Pokud jde o komunikaci, norma UL 2849 nepředepisuje protokol, ale kontroluje, zda například při ztrátě komunikace nebo zjištění poruchy systém bezpečně selže (žádné tepelné události, žádný rozběh motoru). Systém založený na CAN by mohl mít mírnou výhodu v prokazování redundance (např. pokud se ztratí zpráva o plynu, CAN to může zjistit a vhodným způsobem časově omezit). Ale i systémy UART lze navrhnout tak, aby splňovaly normu UL 2849 (potřebují jen důkladné ošetření poruch ve firmwaru řídicí jednotky).
- Prevence požáru a úrazu elektrickým proudem: Normy jako UL 2849 se zaměřují na prevenci požárů a úrazů elektrickým proudem. Pokud je například k elektrokolům připojena nabíječka, neměla by komunikace mezi baterií a nabíječkou (pokud existuje) vést k přebíjení. Pozoruhodné je, že Standard EnergyBus který jsme zmínili a který je založen na CAN, byl částečně motivován bezpečností - zajištění toho, aby jakákoli nabíječka mohla bezpečně nabíjet jakoukoli baterii tím, že komunikuje přes CANopen a umožňuje napájení pouze tehdy, když je provedeno správné handshaking. EnergyBus používá specifický konektor, který obsahuje datové linky CAN, takže nabíječka a baterie nejprve naváží komunikaci a teprve potom povolí nabíjecí proud, aby se zabránilo jiskření nebo nesouhlasnému napětí . Tato koncepce je v souladu s bezpečnostní logikou UL. Pokud značka používá sběrnici EnergyBus, pravděpodobně to pomáhá při absolvování bezpečnostních certifikací, protože ze své podstaty řídí bezpečné interakce mezi součástmi.
- Dodržování předpisů (rychlost/výkon): V USA je systém tříd (elektrokola třídy 1, 2, 3) do značné míry čestný a není tak přísně vynucován jako limity v EU, ale z důvodů odpovědnosti výrobci obvykle zajišťují, že elektrokola prodávaná jako třída 2 nelze snadno upravit tak, aby například překročila rychlost 20 km/h na plyn. I zde může pomoci použití uzavřeného protokolu CAN - uživatelé nemohou jen tak připojit kabel a zrušit omezení na kole. Je pozoruhodné, že mnoho společností vyrábějících elektrokola nyní inzeruje baterie nebo systémy s certifikátem UL, aby zákazníky ujistily o bezpečnosti. Například společnost HOVSCO (jak je vidět z jejich znalostní databáze) zdůrazňuje, že jejich kola splňují požadavky normy UL 2849 pro elektrickou bezpečnost a EN 15194 pro celkovou shodu s bezpečnostními předpisy . To znamená, že jejich elektroinstalace, konektory a komunikace musí fungovat, aniž by způsobovaly nebezpečí.
Mezinárodní a jiné normy: Kromě norem EN 15194 a UL 2849 existují i další relevantní normy - např., ISO 4210 (norma pro bezpečnost jízdních kol) s částí, která se týká požadavků na elektrokola, a německá norma DIN 79010 pro nákladní kola (která, jak jsme uvedli, se týká například pevnosti rámu při zatížení nákladem a brzdného účinku). Ty přímo neurčují elektroniku, ale norma pro nákladní kola může implicitně vyžadovat, aby například asistence nefungovala špatně při velkém zatížení. Robustní komunikace zajišťuje, že i když je kolo namáháno (a třeba se zvýší elektrický šum nebo se prohne baterie), signály mezi baterií, řídicí jednotkou a senzory zůstanou spolehlivé.
Stručně řečeno, shoda s předpisy a bezpečnost určují některá konstrukční rozhodnutí mezi UART a CAN.. Výrobce, který usiluje o maximální bezpečnost, se může přiklonit ke sběrnici CAN pro její kontrolu a řízení chyb nebo může zavést dodatečná ochranná opatření u systémů UART. Oba protokoly mohou být součástí bezpečné konstrukce, ale klíčové je, jak jsou použity. Na adrese uzavřená povaha systémů CAN může vynutit dodržování předpisů (např. omezení rychlosti, které uživatelé nemohou nastavit, jak to vyžaduje zákon) , zatímco Systémy UART nabízejí větší volnost pro uživatele, což je dvousečná zbraň.. Výrobci musí zajistit, aby i motorky založené na UART byly vybaveny například fyzickým nebo softwarovým omezovačem, který nelze snadno hacknout, aby se nepřekročily zákonné limity.
A konečně, bez ohledu na protokol, použití kvalitní konektory a kabeláž je součástí dodržování předpisů. V EU musí kolo vydržet vibrace, aniž by se uvolnily dráty, a za mokra, aniž by došlo ke zkratu. Konektory, jako je Higo/Julet (vodotěsné konektory hojně používané v elektrokolech), jsou oblíbené nejen kvůli pohodlí, ale také proto, že pomáhají splňovat Stupně krytí IP a požadavky na spolehlivost. Sběrnice CAN obvykle používá takové konektory (např. jeden 4 nebo 5pinový konektor Higo může přenášet data a napájení CAN pro displej). Volba protokolu nemění nic na potřebě dobrého odlehčení tahu, izolace a zajišťovací konektory aby se zabránilo odpojení (což by mohlo být nebezpečné, pokud by se například signál vypnutí brzdy nedostal do řídicí jednotky, protože se uvolnil kabel).
Závěrem této části je třeba říci, že Evropa i USA se v současné době výrazně zaměřují na bezpečnost elektrokol. Dodržování norem jako EN 15194 a UL 2849 je pro renomované značky stále více neoddiskutovatelné. Komunikační protokol je jedním dílem skládačky - prostředkem k zajištění koordinace a bezpečnosti elektrického systému. Spolehlivost sběrnice CAN může pomoci při plnění těchto norem tím, že poskytuje robustní komunikaci, zatímco systémy UART vyžadují pečlivý návrh, aby byly stejně bezpečné. Výrobci často volí protokol, který nejlépe odpovídá strategii shody: UART pro jednodušší konstrukce, kde lze riziko snadno zvládnout, nebo CAN pro složité systémy, kde vyniknou jeho bezpečnostní vlastnosti.
Náklady a tržní aspekty při výběru komunikačních protokolů
Při rozhodování mezi komunikačními protokoly (nebo obecně při navrhování elektrického systému elektrokola) jsou důležitým faktorem náklady - nejen finanční, ale také "náklady" z hlediska flexibility a dodavatelských vztahů. Zde se dozvíte, jak se náklady porovnávají a co berou v úvahu nákupčí nebo konstruktéři B2B:
- Náklady na hardware: Jak již bylo uvedeno, systém založený na UART obvykle používá jednodušší hardware. Řadič a displej potřebují pouze funkci UART, kterou mají vestavěnou prakticky všechny mikrokontroléry. Zapojení může být o něco jednodušší (méně úvah o ukončení atd.). Systém založený na CAN vyžaduje trochu více: čip CAN transceiveru pro každé zařízení a případně výkonnější MCU (i když v dnešní době mají i poměrně levné MCU zabudovaný CAN). Skutečný rozdíl v kusovníku (Bill of Materials) se může pohybovat v řádu několika dolarů na kolo ve velkém objemu, ale na konkurenčním trhu to má stále význam. U velkých flotil kol se tyto dolary násobí. To znamená, že náklady na hardware CAN se snížily a tento kompromis by mohl být snadno ospravedlnitelný přidanou funkčností, kterou CAN poskytuje.
- Náklady na vývoj a integraci: Pro začínajícího výrobce elektrokol nebo malou společnost by mohl být vývoj systému založeného na CAN od nuly nákladný, pokud nemá vlastní odborné znalosti. Mohlo by to vyžadovat najmutí inženýrů vestavných systémů, kteří znají CAN, investice do nástrojů a čas strávený vývojem vlastního firmwaru. Alternativně, pokud si koupí hotový systém (např. pohonné jednotky Bosch nebo Shimano, které jsou založeny na CAN), jsou náklady na vývoj na jejich straně nižší, ale jednotková cena je vyšší (systémy Bosch mají vyšší cenu, částečně proto, že získáváte plně integrované řešení a značku). A Systém UART lze často sestavit z hotových komponent. se známou kompatibilitou - například mnoho společností používá open-source nebo standardní protokoly, kde je již mnoho technických řešení hotovo a riziko je nižší. Pro odběratele B2B (například společnost, která chce mít pod svou značkou několik elektronických kol) může přechod na UART znamenat, že může získat levnější generické díly, zatímco přechod na CAN často znamená přizpůsobení se ekosystému konkrétního dodavatele (který může účtovat licenční poplatky nebo vyšší ceny).
- Poprodejní náklady a náklady na údržbu: To se někdy přehlíží. Provozovatel vozového parku (například sdílená kola nebo doručovatelská společnost) může zjistit, že Kola se sběrnicí CAN šetří peníze na údržbu. Proč? Protože mohou diagnostikovat problémy na dálku nebo rychleji. Systém připojený ke sběrnici CAN může podrobně hlásit chybové kódy (například "závada snímače teploty baterie #2" jako konkrétní kód). Technici mohou ke sběrnici CAN připojit diagnostické nástroje a přesně určit problémy. To může zkrátit dobu práce. Jak je vidět v případě IoT Venture, jsou možné i takové věci, jako je dálková aktualizace firmwaru , což může ušetřit náklady na fyzické svolávání motocyklů k určitým opravám. Na druhou stranu počáteční údržba kola s UART může být jednodušší (možná se pokazí méně věcí v komunikaci), ale pokud je něco špatně, možná budete muset provádět výměny dílů metodou pokus-omyl, protože systém vám nedokáže přesně říct, co je špatně, kromě toho, že možná bliká LED dioda. Pro individuálního spotřebitele může být oprava kola s UART levnější, protože k opravě může použít hotové díly a znalosti komunity, zatímco kolo s CAN může být nuceno jít do autorizovaného servisu (potenciálně dražšího). Existuje tedy nákladový kompromis mezi použitelnost pro uživatele (UART vyhrává) a pokročilá diagnostická podpora (CAN vyhrává, což by mohlo snížit náklady na odborné služby).
- Licenční a proprietární náklady: Použití proprietárního protokolu CAN by mohlo být spojeno s licenčními poplatky nebo omezeními. Pokud si značka jízdních kol vytvoří vlastní protokol CAN, je to v pořádku, ale pokud použije něco jako CANopen nebo EnergyBus, bude možná muset dodržovat standardy a případně vstoupit do sdružení (např. EnergyBus e.V.). Tyto náklady jsou obecně malé, ale stojí za zmínku. Proprietární systémy, jako je Bosch, ve skutečnosti znamenají, že OEM výrobce jízdních kol kupuje pohonné jednotky jako balík; cenu určuje Bosch. U systémů UART je často větší konkurence mezi dodavateli dílů, což může snížit ceny.
- Vnímání zákazníka a hodnota: Z marketingového hlediska může značka ospravedlnit vyšší cenu za kolo, které má "elektroniku sběrnice CAN automobilové třídy", protože to zní pokrokově a spolehlivě (i když zákazník rozdíl přímo nevidí). Hodnota je v tom, že prvotřídní pocit a výkon které systémy CAN často obsahují (obvykle jsou na kolech, která mají také kvalitní motory atd.). Značky zaměřené na trh vyšší třídy nebo na komerční klientelu tak mohou systém CAN využít jako součást prémiové nabídky. Naopak u základních e-kol se zákazníci většinou starají o to, aby fungovala a byla cenově dostupná - nebudou připlácet jen proto, že displej kola používá CAN místo UART. Takže, volba protokolu by měla odpovídat segmentu trhu s jízdními koly..
- Zabezpečení budoucnosti: Náklady, které inženýři zvažují, jsou náklady obětované příležitosti v případě, že nejsme připraveni na budoucnost. Pokud nyní investujete do platformy založené na UART, ale příští rok budete chtít přidat další funkce (například druhou baterii nebo nový typ senzoru), může se stát, že stará platforma bude omezující a vynutí si přepracování. Některé společnosti se rozhodnou, že je z dlouhodobého hlediska nákladově efektivnější zvolit od začátku platformu CAN, i když není plně využita, aby zbyl prostor pro nové funkce a příslušenství. To může v budoucnu ušetřit náklady na přestavbu. Jde o strategické rozhodnutí: zaplatit o něco více předem oproti potenciálně mnohem vyššímu pozdějšímu upgradu.
Pokud jde o skutečné ceny: je těžké je určit, ale člověk z oboru by mohl říci, že například základní sada UART pro e-bike + displej by mohla stát řekněme $50-$100 ve velkém, zatímco ekvivalentní sada založená na CAN od velké značky by mohla stát několik set dolarů (protože je sofistikovanější). Tento rozdíl však často zahrnuje i lepší výkon motoru, záruku atd. a ne jen rozdíl v komunikaci. . přírůstkové náklady pouze na protokol (např. přidání čipu CAN) je malý, ale náklady na ekosystém (připojení k drahému systému oproti levnému generickému systému) může být velký.
Jednoduše řečeno pro kupce elektrokol B2B:
- Pokud je vaší prioritou nejnižší jednotkové náklady a chcete flexibilně získávat zdroje od více dodavatelů, je možné použít Otevřený systém založený na UART je atraktivní. Můžete se poohlédnout po vhodných displejích a ovladačích, případně dokonce vyjednávat s více továrnami.
- Pokud je vaší prioritou výkon, spolehlivost a systém na klíč. (a jste ochotni za něj zaplatit), a Systém založený na CAN od renomovaného dodavatele vám může ušetřit bolesti hlavy a přidat hodnotu vašemu produktu (za cenu vyšších nákladů, které se vám snad vrátí díky vyšší ceně kol nebo díky efektivitě objemu).
Omezení a budoucí trendy
I když vychvalujeme přednosti UART a CAN, stojí za to si uvědomit. omezení současného stavu komunikace na elektrokolech. a kam by mohly věci směřovat:
- Nedostatečná standardizace v celém odvětví: Na rozdíl od automobilového světa, kde téměř každý automobil používá sběrnici CAN a standardizovanou diagnostiku (OBD-II), je odvětví elektrokol stále roztříštěné. Existuje žádný jednotný univerzální protokol které používají všechna elektrokola. Implementace UART se liší (každý výrobce může mít jiné formáty dat přes UART) a implementace CAN jsou často proprietární. To je omezení pro spotřebitele a montážní firmy kol - není možné "plug and play" mezi různými značkami. Nemůžete vzít náhodný displej a očekávat, že bude fungovat s náhodnou řídicí jednotkou, pokud výslovně nepoužívají stejný protokol a firmware. EnergyBus je slibnou snahou o standardizaci (s protokolem CANopen CiA-454 definujícím zprávy pro komponenty elektrokol) , ale zatím není rozšířená. Pokud se prosadí EnergyBus nebo podobné standardy, mohli bychom se dočkat skutečně interoperabilních komponent - například baterie od výrobce X by mohla být použita s motorovým systémem od výrobce Y, přičemž protokol založený na CANopen by zajistil, že si budou vzájemně rozumět. To by bylo výhodné pro odběratele B2B (více možností dodavatelů) i pro spotřebitele (více možností modernizace/opravy). Hráči v odvětví však mají také obchodní motivaci udržovat proprietární systémy (aby si zajistili zákazníky). Napětí mezi standardizace vs. proprietární kontrola bude určovat budoucnost protokolů pro elektrokola.
- Šířka pásma a datové potřeby: V současné době je komunikace na elektrokolech poměrně málo datová. Budoucí elektrokola však mohou přenášet více informací - představte si sběr dat z vysokofrekvenčních senzorů točivého momentu nebo měření výkonu s vysokým rozlišením pro tréninkové účely, nebo dokonce videa z kamer pro zajištění bezpečnosti. CAN při klasických rychlostech se může stát úzkým hrdlem, pokud je třeba odeslat velké množství dat. Automobilový průmysl má k dispozici CAN-FD (rozšířenou verzi CAN s většími datovými rámci a vyšší propustností) a další protokoly, jako je Ethernet, pro potřeby vysoké šířky pásma. Pro elektrokola by se v případě potřeby mohl časem objevit CAN-FD nebo BLE/Wi-Fi pro přenášení datových protokolů. Bezdrátová komunikace může také doplňovat drátové protokoly: mnoho elektrokol již využívá Bluetooth Low Energy pro připojení kola k aplikaci v chytrém telefonu. To je mimo rámec vnitřního elektrického systému, ale stojí to za zmínku jako paralelní kanál. Možná, že v budoucnu by některá jednodušší elektrokola mohla dokonce upustit od drátového displeje a používat bezdrátový modul k telefonu - i když kritické ovládací prvky (jako jsou signály plynu nebo brzdy) by pravděpodobně zůstaly kvůli spolehlivosti drátové. V nákladních flotilách bychom se mohli dočkat větší integrace komunikace V2X (vehicle-to-everything) - elektrokola by komunikovala s logistickými systémy nebo dopravní infrastrukturou, což by opět bylo navrstveno na základní systém sběrnice CAN.
- Obavy o bezpečnost: S tím, jak se elektrokola propojují a využívají složitější komunikaci, kybernetická bezpečnost se stává problémem. Systém UART bez externího připojení je prakticky imunní vůči hackerům (někdo by se musel fyzicky napojit na kabely). Ale sběrnice CAN, která je propojena s modulem Bluetooth nebo modulem GSM (pro sledování vozového parku), představuje potenciální zranitelnost. Výrobci budou muset zajistit, aby jejich protokoly (zejména bezdrátová rozhraní ke sběrnici) byly bezpečné a zabránily tak škodlivému ovládání (představte si hackera internetu věcí, který by mohl na dálku vyřadit z provozu flotilu dodávkových kol - což je sice vzdálený, ale teoreticky možný scénář, pokud by nebyl zabezpečen). Proprietární protokoly jsou ze své podstaty do jisté míry zabezpečené skrze zastínění, ale jakmile se CAN stane v elektrokolech všeobecně známou záležitostí, mohli by se špatní aktéři pokusit injektovat zprávy CAN prostřednictvím odhaleného portu. Proto se v budoucnu můžeme setkat s častějším šifrováním nebo ověřováním v komunikaci na elektrokolech.
- Zkušenosti uživatelů: Ať už se použije jakýkoli protokol, měl by nakonec sloužit k dobrému uživatelskému zážitku. Jezdce zajímají věci jako plynulý přísun energie, přesné informace na displeji a bezpečnostní funkce fungující v případě potřeby. Omezením prvních systémů založených na CAN bylo, že někdy byly příliš uzamčené - uživatelé se cítili frustrovaní, že nemohou změnit ani jednoduché předvolby. S tím, jak systémy dospívají, mohou výrobci najít způsoby, jak uživatelům poskytnout flexibilitu (prostřednictvím autorizovaných aplikací nebo nastavení), aniž by došlo k narušení kontroly. Například by aplikace mohla umožnit omezené ladění (v bezpečných mezích) i v systému CAN nebo umožnit příslušenství třetích stran, které je certifikováno, komunikovat na sběrnici (třeba pomocí standardních zpráv EnergyBus). Se standardizací protokolů můžeme očekávat o něco větší otevřenost, paradoxně i ve světě CAN.
Na závěr elektrický komunikační systém elektrokol - ať už UART nebo CAN - má zásadní význam pro výkon, bezpečnost a modularitu kola.. Inženýři, kteří navrhují e-kola, musí vyvažovat jednoduchost UART a sofistikovanost CAN. B2B nákupčí musí zvážit, jak volba ovlivní náklady, dodavatelský řetězec a nabídku hodnoty jejich výrobku. Zdá se, že odvětví směřuje ke sběrnici CAN s tím, jak se elektrokola vyvíjejí v propojenější a schopnější stroje , ale systémy založené na UART pravděpodobně zůstanou po nějakou dobu paralelní pro jednodušší a levnější modely (jsou koneckonců "dostatečně dobré" pro obrovský segment jezdců).
Pochopením těchto komunikačních protokolů - v podstatě elektrický jazyk elektrokol - člověk mnohem lépe pochopí, jak elektrokola fungují uvnitř. Od otočení plynového pedálu nebo sešlápnutí pedálu, přes nárazový výkon motoru až po čísla na displeji - to vše je umožněno bity a bajty, které se pohybují po drátech a zajišťují, že synchronizace baterie, motoru a jezdce.. A ať už se jedná o elegantní městské elektrokolo, nebo o těžký nákladní vůz, díky této harmonii je jízda bezproblémová a bezpečná. Cílem každého protokolu je nakonec to, aby technologie ustoupila do pozadí a jezdec si mohl jednoduše užívat jízdu - nyní však doufejme s trochou přehledu o působivé elektronické koordinaci, která se odehrává pod jeho nohama.
Zdroje:
- Qiolor Ebike Guide - "Jak si vybrat kompatibilní displej pro ovladač vašeho elektrokola" (2025) - diskuse o jazycích UART vs. CANBUS a důležitosti shodných protokolů.
- Velco.tech - "CAN vs UART: rozdíly mezi komunikačními režimy" (2024) - vysvětlení jednoduchosti UART oproti síťovým možnostem CAN a uvedení jejich výhod/omezení.
- Centrum nápovědy Biktrix - "Jaké jsou protokoly CANBUS a UART?" - uživatelský pohled na to, jak CAN blokuje nastavení (pevný rychlostní limit) oproti UART umožňuje úpravy , plus srovnání zaměnitelnosti displejů.
- IoT Venture (případová studie s vozovým parkem CYCLE) - popisuje výhody integrace CAN ve vozových parcích elektrokol: přístup k údajům o údržbě, vzdálená deaktivace motoru, aktualizace OTA .
- Znalosti HOVSCO - "Jaké bezpečnostní prvky mají elektrická kola?" - poznámky k normě EN 15194 (EU), která zajišťuje omezení rychlosti/výkonu a odolnost, a k normě UL 2849 (USA), která se zaměřuje na elektrickou/požární bezpečnost, a také zmínka o normě DIN 79010 pro bezpečnost nákladních kol.
- Poznámky k aplikacím Texas Instruments - "Úvahy o návrhu hardwaru pro elektrické jízdní kolo s použitím motoru BLDC" - poskytl typická bloková schémata systému elektrokol a vhled do řídicí elektroniky.
- Letrigo Ebike Knowledge - "Vysvětlení zapojení displeje elektrokola" - podrobnosti o zapojení, konektorech (Higo/Julet) a upozorňuje, že neexistuje žádný univerzální standard zapojení, a klade důraz na správné sladění spojů a robustní zapojení pro integritu signálu.
- Standard EnergyBus - Úvod od společnosti Kvaser - popisuje EnergyBus jako otevřený standard založený na CANopen pro komponenty LEV, který zajišťuje kompatibilitu a bezpečnost napříč výrobci.




